






零、系统/硬盘-挂载与修复
0.1系统修复
当前挂载盘查看
df -h
所有硬盘
sudo fdisk -l
尝试修复某一硬盘
sudo fsck.ext4 -f /dev/sda1
开始挂载
sudo mkdir /mnt
sudo mount /dev/nvme0n1p7 /mnt
sudo chroot /mnt
sudo cp /etc/resolv.conf /mnt/etc/resolv.conf
移除nvidia驱动——大部分原因是驱动安装or实时内核
sudo apt-get --purge remove nvidia*
sudo apt autoremove
sudo apt-get --purge remove "*cublas*" "cuda*"
sudo apt-get --purge remove "*nvidia*"
sudo apt-get install linux-image-generic #
安装系统内核
sudo update-grub #更新
grub
ubuntu-drivers devices
sudo apt install xserver-xorg-video-nouveau
sudo apt install nvidia-driver-535
sudo mount --bind /dev /mnt/dev
sudo mount --bind /proc /mnt/proc
sudo mount --bind /sys /mnt/sys
sudo mount --bind /home /mnt/home
sudo cp /etc/resolv.conf /mnt/mydisk
sudo umount /media/ubuntu0315/dev
0.2硬盘挂载与修复
查看当前挂载
df -h
查看所有硬盘
sudo fdisk -l
修复
sudo fsck.ext4 -f /dev/sda1
改权限
sudo chown -R robot:robot /media/robot/65d9776a-8ad2-4c9f-95eb-c551b0764362
sudo chown -R robot:robot /media/robot/7e5ac476-3c3f-4884-a1f4-9563985953d3
目标是是实现:sudo chown -R robot:robot /media/disk8t 和 /media/disk8t
挂载
sudo mkdir /media/disk2t
sudo mount /dev/sdb1 /media/disk2t
sudo mount -t ext4 /dev/sda1 /media/disk8t
0.3远程控制
sudo apt-get install xrdp
sudo adduser xrdp ssl-cert
sudo systemctl restart xrdp
可选:查看状态 sudo systemctl status xrdp
不建议配置防火墙,除非你爱折腾,或者网安专业
sudo apt update
sudo apt install vim
黑屏一般是因为ubuntu系统只允许一个账号登陆,所以这里需要改写一下xrdp启动命令
sudo vim /etc/xrdp/startwm.sh
- 添加配置
unset DBUS_SESSION_BUS_ADDRESS
unset XDG_RUNTIME_DIR- 位置是以下代码的上方一行
- test -x /etc/X11/Xsession && exec /etc/X11/Xsession
- 插入模式:按
i键进入插入模式,可以在光标位置开始插入文本。 - 替换模式:按
R键进入替换模式,可以替换光标下的文本。
- 插入模式:按
- exec /bin/sh /etc/X11/Xsession
-
编辑文本: 在插入或替换模式下,您可以像使用其他文本编辑器一样编辑文本。
-
保存更改: 保存更改需要先切换回普通模式。按
Esc键退出插入或替换模式,然后执行以下命令:- 保存但不退出:
:w - 保存并退出:
:wq - 不保存并退出:
:q!
- 保存但不退出:
sudo systemctl restart xrdp
ubuntu远程桌面配置以及常见问题_ubuntu开启远程桌面连接-CSDN博客
0.4添加账户并给管理员权限
# 添加一个名为new_user的新用户,并自动为其创建主目录
sudo useradd -m new_user
# 如果想要指定家目录位置,可以使用-d选项
sudo useradd -m -d /path/to/home/new_user new_user
# 同时设置初始密码(在创建用户后立刻设置密码)
sudo passwd new_user
# 将新用户添加到sudo组
sudo usermod -aG sudo new_user_name
https://www.cnblogs.com/huangjiabobk/p/18098101
一、系统安装后初始化
1.1系统更新
sudo apt-get update
sudo apt-get upgrade
sudo apt-get -f install
sudo apt-get dist-upgrade
1.2root用户创建
sudo passwd root
后续进入可通过命令行:su
【Ubuntu】Ubuntu 添加 root 用户_ubuntu创建root用户-CSDN博客
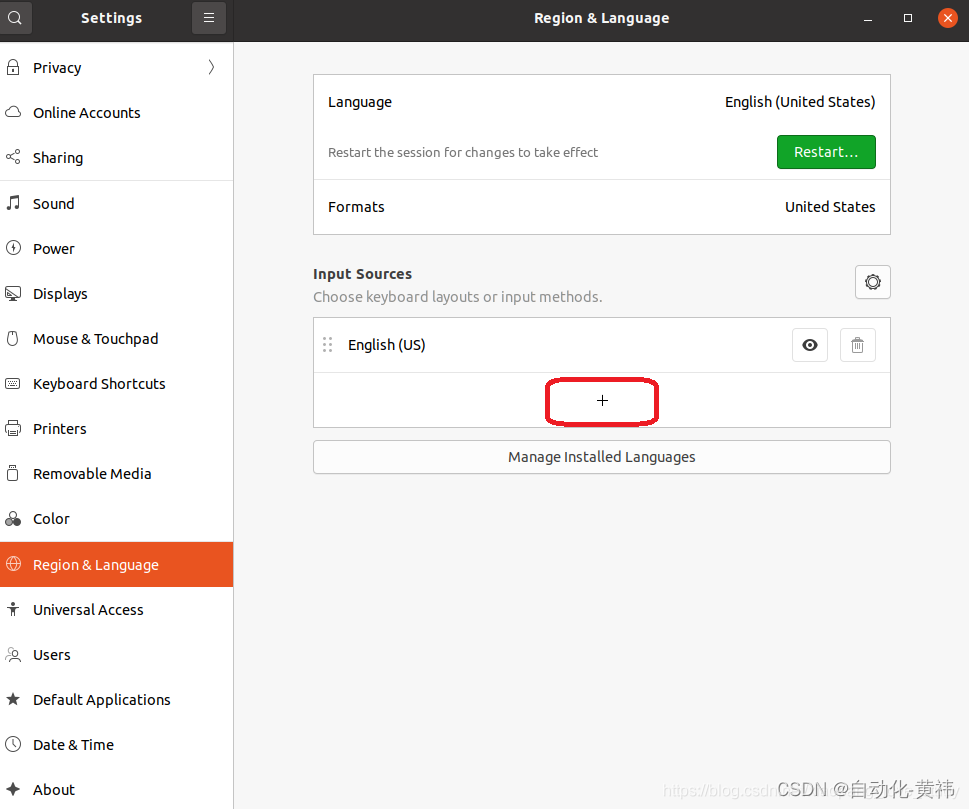
1.3输入法or语言
1.3.1 一般自动更新后,再添加语言就有汉语拼音(若修改系统为汉语,建议不修改文件夹名)

如果残缺可以自动更新


1.3.2部分情况下——需设置语言环境
语言,添加语言,设置更新语言包,


1.4 edge浏览器
下载了解 Microsoft Edge,右上角点击下载
安装 双击,或者dpkg -i XXXX.deb
二、换源+ros+vscode+github
2.1一键安装教程
wget http://fishros.com/install -O fishros && . fishros
一键安装ros(换源+noetic),depc,vscode,github
2.2安装gazebo与moveit
sudo apt-get install ros-noetic-gazebo*
sudo apt-get install ros-noetic-moveit*
2.3配置机械臂
Franka机械臂安装教程实践
联想Y9000P 13900+4080
ubuntu20.04+ros-noetic+550.54+cuda11.8+?
sudo apt install ros-noetic-libfranka ros-noetic-franka-ros
rosdepc install --from-paths src --ignore-src --rosdistro noetic -y --skip-keys libfranka
sudo apt-get install ros-noetic-joint-limits-interface
sudo apt-get install ros-noetic-transmission-interface
sudo apt-get install ros-noetic-combined-robot-hw
sudo apt-get install ros-noetic-controller-interface
sudo apt-get install ros-noetic-panda-moveit-config
sudo apt-get install ros-noetic-controller-manager
sudo apt-get install ros-noetic-control-toolbox
sudo apt-get install ros-noetic-gazebo-ros-control
参考文献:Franka机器人学习笔记 - 知乎
Installation on Linux — Franka Control Interface (FCI) documentation
参考文献:从零开始配置franka机器人,让你的franka动起来_franka机器人学习-CSDN博客
参考文献:Installation on Linux — Franka Control Interface (FCI) documentation
ubuntu打实时内核补丁教程以及安装后显卡驱动问题解决方法 - 代码先锋网参考文献:ubuntu打实时内核补丁教程以及安装后显卡驱动问题解决方法 - 代码先锋网
2.4配置视觉环境-cuda
2.4.1随便选个驱动,我一般下535,或者你可以安装最新的
2.4.2 CUDA11.8 cuda12.1等等,多个cuda可以兼容,切换./bashc内环境就行
安装驱动方式一——自动安装(推荐)
打开软件与更新
点击附加与驱动
选取535 社区版 open-kernal
安装驱动方式二——安装最新驱动(不推荐,新手操作容易选错,而且最新版一般不适配老版ubuntu)
sudo add-apt-repository ppa:graphics-drivers/ppa #填加显卡安装源
sudo apt-get update
sudo ubuntu-drivers autoinstall
【nvidia】1.命令行方式安装nvidia显卡驱动_nvidia-smi 安装-CSDN博客
安装cuda方式一——.run版本(推荐)
安装cuda方式二——.deb版本(不推荐,会覆盖驱动)
wget https://developer.download.nvidia.com/compute/cuda/repos/ubuntu2004/x86_64/cuda-ubuntu2004.pin
sudo mv cuda-ubuntu2004.pin /etc/apt/preferences.d/cuda-repository-pin-600
wget https://developer.download.nvidia.com/compute/cuda/11.8.0/local_installers/cuda-repo-ubuntu2004-11-8-local_11.8.0-520.61.05-1_amd64.deb
sudo dpkg -i cuda-repo-ubuntu2004-11-8-local_11.8.0-520.61.05-1_amd64.deb
sudo cp /var/cuda-repo-ubuntu2004-11-8-local/cuda-*-keyring.gpg /usr/share/keyrings/
sudo apt-get update
sudo apt-get -y install cuda
不想自动安装驱动时,sudo apt-get -y install cuda --exclude=cuda-drivers
2.4.3 cuDNN 9.0.0 Downloads(加速用,不必须,可在python里安装torchvision)
sudo apt install nvidia-cuda-toolkit
CUDA Toolkit 提供了 GPU 编程的基础设施,而 cuDNN 是一个专门针对深度学习任务的加速库,它们通常一起使用来开发高效的深度学习应用程序。在安装和使用 cuDNN 时,需要确保它与安装的 CUDA Toolkit 版本兼容。
理清GPU、CUDA、CUDA Toolkit、cuDNN关系以及下载安装_cudatoolkit-CSDN博客
https://developer.nvidia.com/cudnn-downloads?target_os=Linux&target_arch=x86_64&Distribution=Ubuntu&target_version=20.04&target_type=deb_local
wget https://developer.download.nvidia.com/compute/cudnn/9.0.0/local_installers/cudnn-local-repo-ubuntu2004-9.0.0_1.0-1_amd64.deb
sudo dpkg -i cudnn-local-repo-ubuntu2004-9.0.0_1.0-1_amd64.deb
sudo cp /var/cudnn-local-repo-ubuntu2004-9.0.0/cudnn-*-keyring.gpg /usr/share/keyrings/
sudo apt-get update
sudo apt-get -y install cudnn
三、安装其它
3.2edge
sudo dpkg -i microsoft-edge-stable_122.0.2365.92-1_amd64.deb
3.3miniconda
cd /opt #软件包下载位置
sudo wget https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/Miniconda3-latest-Linux-x86_64.sh
sudo bash Miniconda3-latest-Linux-x86_64.sh
[/root/miniconda3] >>> /opt/miniconda3
export PATH="/opt/miniconda3/bin:$PATH"
sudo chown -R franka /opt/miniconda3
conda install pytorch安装的是torch CPU版本,conda install pytorch torchvision -c pytorch安装的是GPU版本
切换CUDA版本不用增删动态链接库,而是使用 LD_LIBRARY_PATH 来控制适用不同版本的 CUDA runtime。 anaconda 也是用 LD_LIBRARY_PATH 来控制CUDA版本的
在使用 CMake 等编译和运行的过程中,可以根据 CUDA_PATH 这个环境变量选择CUDA 版本,而不需要删除、创建软连接
conda config --show channels
conda config --show-sources
conda install mamba -n base -c conda-forge
修改.condarc
channels:
- defaults
custom_channels:
conda-forge: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
msys2: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
bioconda: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
menpo: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
pytorch: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
simpleitk: https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud
default_channels:
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/r
- https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/msys2
show_channel_urls: True
pip config set global.index-url https://mirrors.aliyun.com/pypi/simple/
自动解决了网络问题
3.4 SpireView
- Nvidia显卡驱动,根据自己情况安装
- CUDA(推荐11.8)
- Python(≥3.8)、Pytorch(推荐2.0.1)
3.4.1 SegmentAnything
# 或者用官网链接 git clone https://github.com/SysCV/sam-hq.git
git clone https://gitee.com/jario-jin/sam-hq.git
cd sam-hq
pip3 install -e . -i https://pypi.tuna.tsinghua.edu.cn/simple/
pip3 install opencv-python pycocotools matplotlib onnxruntime onnx timm -i https://pypi.tuna.tsinghua.edu.cn/simple/
python3 scripts/export_onnx_model.py --checkpoint ~/Models/sam_hq_vit_h.pth --model-type vit_h --output ~/Models/sam_hq_vit_h.onnx
3.4.2 GroundingDINO安装方式如下(可选)
cd ~
# 或者用官网链接 git clone https://github.com/IDEA-Research/GroundingDINO.git
git clone https://gitee.com/jario-jin/GroundingDINO.git
cd GroundingDINO/
pip3 install -e . -i https://pypi.tuna.tsinghua.edu.cn/simple/
cp ~/GroundingDINO/groundingdino/config/GroundingDINO_SwinT_OGC.py ~/Models/groundingdino_swint_ogc.py
3.6 安装455f
3.5网络参考 AX1675i
https://www.cnblogs.com/zsy-xmfc/p/17407690.html
linux-firmware.git | 镜像站使用帮助 | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror















 595
595











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









