






 本文概述了CARLA仿真系统的基本架构,包括server-client模块、Actors和Blueprints概念,地图导航,传感器数据,以及高级功能如OpenDRIVE、交通管理器等。介绍了CARLA生态系统的相关开源库及其应用场景。
本文概述了CARLA仿真系统的基本架构,包括server-client模块、Actors和Blueprints概念,地图导航,传感器数据,以及高级功能如OpenDRIVE、交通管理器等。介绍了CARLA生态系统的相关开源库及其应用场景。
carla自动驾驶仿真系统的基础
主要翻译自官网文档:Core concepts - CARLA Simulator
一、server-client架构
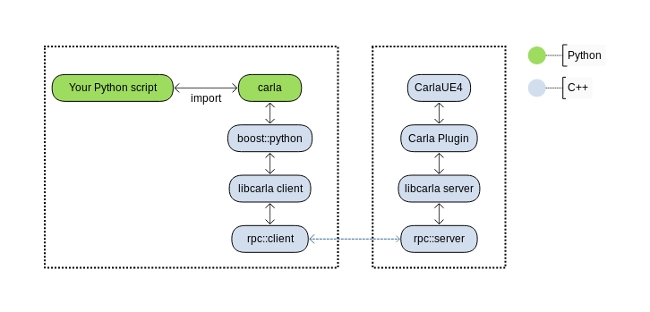
Carla主要分为Server与Client两个模块,Server端用来建立这个仿真世界,而Client端则是由用户控制,用来调整、变化这个仿真世界。
二、 核心概念
1. server-client

-
Server,Server端负责任何与仿真本身相关的事情:
世界是代表模拟的对象,它作为一个抽象层,包含产生actor、改变天气、获取世界的当前状态等的主要方法。每个模拟只有一个世界。 当地图更改时,它将被销毁并替换为新的。
从3D渲染汽车、街道、建筑,传感器模型的构建,到物理计算等等。它就像一个造物主, 将整个世界建造出来,并且根据Client 的外来指令更新这个世界。它本身是基于UnrealEnigne做出的3D渲染(很多游戏都是使用这个强大的引擎做的)。
-
Client,如果server构造了整个世界,那么这个世界不同时刻到底该如何运转(比如天气是什么样,有多少辆车在跑,速度是多少)则是由Client端控制的。
客户端是用户运行以在模拟中询问信息或更改的模块,客户端使用IP和特定端口运行。它通过终端与服务器通信,可以有多个客户端同时运行。高级多客户端管理需要对CARLA和同步性有透彻的了解。
用户通过书写Python脚本(最新版本C++也可以)来向Server端输送指令指导世界的变化,Server根据用户的指令去执行。(可以理解为Client端耍耍嘴皮子下个指令,咱们的造物主亲力亲为去执行这些指令。)另外,Client端也可以接受Server端的信息,譬如某个照相机拍到的路面图片。
2. Actors and blueprints
-
Actors是在模拟中发挥作用的任何东西:
- 车辆
- 步行者
- 传感器
- 旁观者
- 交通标志和交通灯
-
blueprints
- 蓝图是生成actor 所必需的已经制作好的actor 布局。 基本上,具有动画和一组属性的模型。 其中一些属性可以由用户自定义,其他属性则不能。 有一个蓝图库,其中包含所有可用的蓝图以及有关它们的信息。
3. 地图和导航
- 地图是代表模拟世界的对象,主要是城镇。 有八张地图可用。 它们都使用 OpenDRIVE 1.4 标准来描述道路。
- 道路、车道和路口由 Python API 管理,可从客户端访问。 这些与航点类一起使用,为车辆提供导航路径。
交通标志和交通灯:可作为carla.Landmark对象访问,其中包含有关其 OpenDRIVE 定义的信息。 此外,模拟器在运行时使用 OpenDRIVE 文件上的信息自动生成停止、让出和交通灯对象。这些边界框放置在道路上。一旦进入其边界框,车辆就会意识到它们。
4. 传感器和数据
传感器等待某个事件发生,然后从模拟中收集数据。 他们需要一个定义如何管理数据的函数。根据哪个传感器检索不同类型的传感器数据。
传感器是连接到父车辆的角色。它跟随周围的车辆,收集周围的信息。可用的传感器由它们在蓝图库中的蓝图定义。
- 相机(RGB、深度和语义分割)
- 碰撞检测器
- Gnss 传感器
- 惯性传感器
- 激光雷达投射
- 车道入侵检测器
- 障碍物探测器
- 雷达
- RSS
三、 高级功能/概念
CARLA 提供了超出本模拟器介绍范围的广泛功能:
- OpenDRIVE:独立模式。仅使用 OpenDRIVE 文件生成道路网格。允许将任何 OpenDRIVE 地图加载到 CARLA 中,而无需创建资产。
- PTV-Vissim联合仿真:在 CARLA 和 PTV-Vissim 交通模拟器之间运行同步模拟。
- rcorder:保存模拟状态的快照以精确地重新进行模拟。
- 渲染选项:图形质量设置、离屏渲染和无渲染模式。
- RSS:为责任敏感安全集成C++库以使用安全检查修改车辆的轨迹。
- 模拟时间和同步:关于模拟时间,和服务器客户端通信的一切。
- SUMO 联合仿真:在 CARLA和SUMO交通模拟器之间运行同步模拟。
- 交通管理器:该模块负责所有设置为自动驾驶模式的车辆。它模拟城市中的交通,使模拟看起来像真实的城市环境。
自动驾驶之所以难搞,很核心的一个原因就是现实世界车太多了,arla专门构造了Traffic Manager这个模块来模拟类似现实世界负责的交通环境。通过这个模块,用户可以定义N多不同车型、不同行为模式、不同速度的车辆在路上愉快地与你的自动驾驶汽车(Ego-Vehicle)一起玩耍。
四、CARLA生态系统
与CARLA仿真平台相关的开源库:
- Scenario_Runner:在CARLA 0.9.X中执行交通场景的引擎
- ROS-bridge:用于将CARLA 0.9.X连接到ROS的接口
- Driving-benchmarks:用于自动驾驶任务的基准工具
- Conditional Imitation-Learning:在CARLA中训练和测试条件模仿学习模型
- AutoWare AV stack: Bridge to connect AutoWare AV stack to CARLA
- Reinforcement-Learning:在CARLA中运行条件强化学习模型的代码
- Map Editor:独立的GUI应用程序可通过交通信号灯和交通标志信息来增强RoadRunner地图


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









