







最近在做双摄像头的立体匹配,发现OpenCV定标效果不如MatLab的效果,于是用MatLab标定箱做标定,将得到的结果保存为xml,然后,提供给opencv使用。
MatLab标定箱做标定得到的结果如下图所示:
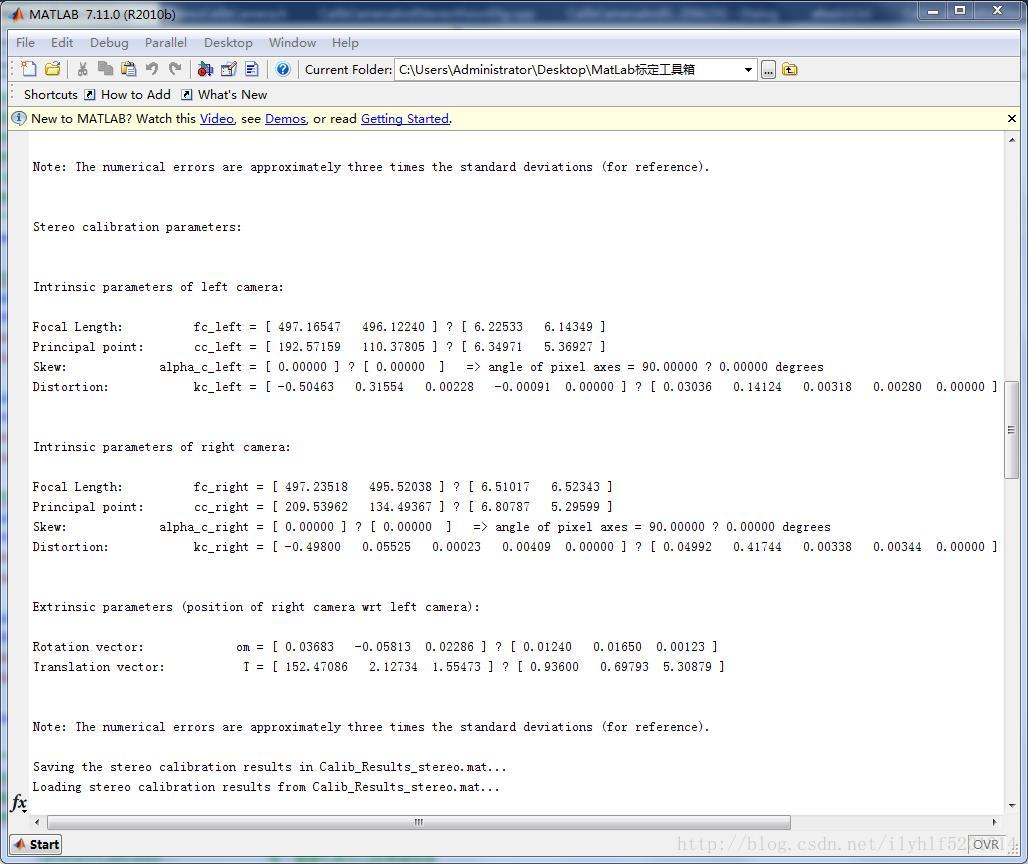
将结果保存为xml代码如下:
// SaveMatLabCalibParam.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <cv.h>
#include <highgui.h>
int _tmain(int argc, _TCHAR* argv[])
{
double data[9]={ 497.16547, 0 , 192.57159,
0 , 496.12240, 110.37805,
0 , 0, 1
};
CvMat intrinsic_matrix;
cvInitMatHeader(&intrinsic_matrix,3,3,CV_64F,data);
cvSave("intrinsic.xml",&intrinsic_matrix);
return 0;
}
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3423
3423

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









