







利用opencv2.4.10+VS2012和RobHess的sift特征算法实现全景图像拼接
一、保证opencv配置成功,可以参考以下网址来配置。
openCV的配置
二、下载RobHess的SIFT源码并测试使用其源代码。
1、下载
下载“sift-latest_win.zip”这个文件(下载链接)。
2、测试(自信opencv配置成功的话可以跳过这一步)
测试使用其源码可参考此网址。
在测试过程可能会遇到如下错误:
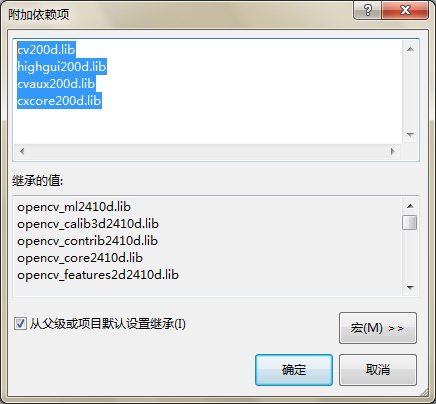
“error LNK1104: 无法打开文件“cv200d.lib” D:\sift-latest_win\sift-1.1.2_20101207_win\match\LINK match”
在菜单中点击”项目”->”属性”->”配置属性”->”链接器”->”输入”,把”附加依赖项”的其中四个lib文件删除,文件名如图
如果能成功运行程序,证明环境配置成功,可以使用RobHess的源码。
三、实现全景拼接的具体操作。
1、新建一个控制台应用程序并给它命名,例如“RobHess_SIFT”。
2、添加所需项。
从下载的文件夹当中找到所需的头文件(.h)和源文件(.c)拷贝到项目的默认路径,然后将其添加到”解决方案资源管理器“,如图
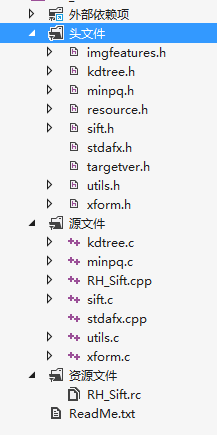
(图中显示的即为所需文件)
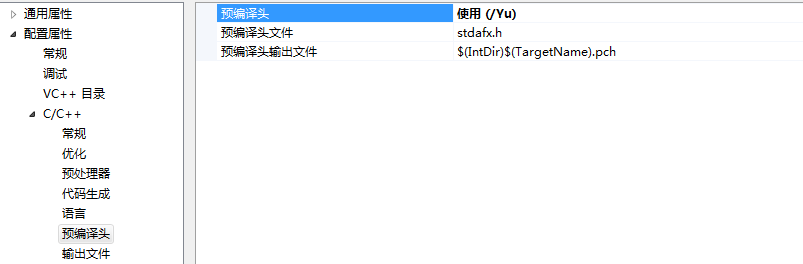
3、取消.c文件的预编译。
“项目”->”属性”->”配置属性”->”C/C++”->”预编译头”,在”预编译头”选项中选择”不适用预编译头”。
4、C语法设定,实现C语言在C++文件里面混合编程。
方法:分别打开xform.h、sift.h、kdtree.h、utils.h、imgfeatures.h(以后的代码中有用到这些头文件里面声明的函数,所以在主函数所在文件要把这些头文件都include进来),把所有函数包含在
#ifdef __cplusplus
extern "C" {
#endif和
#ifdef __cplusplus
}
#endif之间。
5、(如果跳过了测试步骤的要做这一步)
在util.c中添加“#include < stdargh.h>,不然编译时候会报错。
6、利用源代码实现全景拼接。
主要分为以下几个步骤:
(1) 读入两张图片并分别提取SIFT特征
(2) 利用k-d tree和BBF算法进行特征匹配查找
(3) 利用RANSAC算法筛选匹配点并计算变换矩阵
(4) 图像融合
(1) 读入两张图片并分别提取SIFT特征
调用RobHess源码中的sift_features()函数进行默认参数的SIFT特征提取,主要代码如下:
img1_Feat = cvCloneImage(img1);//复制图1,深拷贝,用来画特征点
img2_Feat = cvCloneImage(img2);//复制图2,深拷贝,用来画特征点
//默认提取的是LOWE格式的SIFT特征点
//提取并显示第1幅图片上的特征点
n1 = sift_features( img1, &feat1 );//检测图1中的SIFT特征点,n1是图1的特征点个数
export_features("feature1.txt",feat1,n1);//将特征向量数据写入到文件
draw_features( img1_Feat, feat1, n1 );//画出特征点
cvNamedWindow(IMG1_FEAT);//创建窗口
cvShowImage(IMG1_FEAT,img1_Feat);//显示
//提取并显示第2幅图片上的特征点
n2 = sift_features( img2, &feat2 );//检测图2中的SIFT特征点,n2是图2的特征点个数
export_features("feature2.txt",feat2,n2);//将特征向量数据写入到文件
draw_features( img2_Feat, feat2, n2 );//画出特征点
cvNamedWindow(IMG2_FEAT);//创建窗口
cvShowImage(IMG2_FEAT,img2_Feat);//显示 以上要添加定义的变量(定义为全局变量,以后定义的也是)有
IplImage *img1, *img2, *img1_Feat, *img2_Feat;
struct feature *feat1, *feat2;
int n1, n2;其中img1,img2保存载入的两张待拼接的图像。
检测出的SIFT特征点如下:


(2) 利用k-d tree和BBF算法进行特征匹配查找,并根据最近邻和次近邻距离比值进行初步筛选
也是调用RobHess源码中的函数,加上之后的一些筛选处理,主要代码如下:
//根据图1的特征点集feat1建立k-d树,返回k-d树根给kd_root
kd_root = kdtree_build( feat1, n1 );
Point pt1,pt2;//连线的两个端点
double d0,d1;//feat2中每个特征点到最近邻和次近邻的距离
int matchNum = 0;//经距离比值法筛选后的匹配点对的个数
//遍历特征点集feat2,针对feat2中每个特征点feat,选取符合距离比值条件的匹配点,放到feat的fwd_match域中
for(int i = 0; i < n2; i++ )
{
feat = feat2+i;//第i个特征点的指针
//在kd_root中搜索目标点feat的2个最近邻点,存放在nbrs中,返回实际找到的近邻点个数
int k = kdtree_bbf_knn( kd_root, feat, 2 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2996
2996

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









