






适用于SEU机器人技术基础-BY SEU_SYZ
实验2:多轴水刀头运动学建模与分析
1实验目的
(1)分析五轴龙门式数控水切割机刀头的运动学;
(2)建立2-DoF水刀头机构的正运动学方程和逆运动学方程;
(3)使用Matlab Robotics Toolbox进行仿真验证;
(4)将水刀头作为末端执行器嫁接到不同机器人末端,实现水切割机器人的动作仿真。
2实验背景
五轴龙门式数控水切割机由龙门架的XYZ三轴和工作部(刀头)的两轴(A轴和C轴)组成。刀头结构中,A轴在YZ平面内与C轴成45°夹角,C轴与参考坐标系的Z轴重合。通过A轴和C轴的旋转,可以获得喷嘴的前倾角δ和偏摆角γ,实现对水射流甩尾和切口斜面的补偿。
3实验内容与结果分析
3.1水刀头2-DOF机器人建模
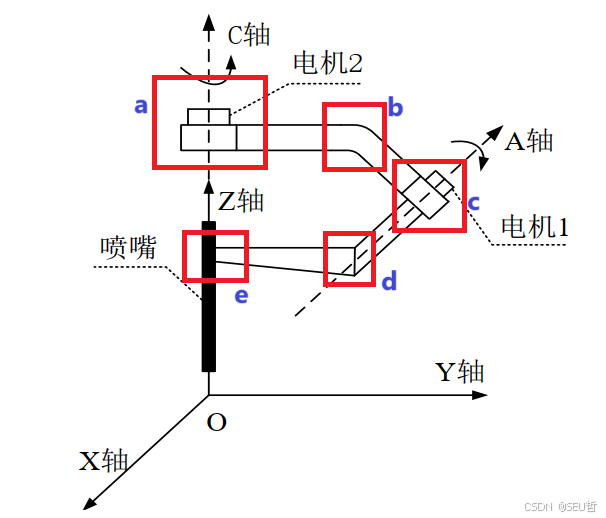
为了最大程度地仿真水刀头的运动,用D-H参数法建立水刀头的机器人模型时,在a、c处建立真关节,在b、d、e处建立假关节。建立假关节的目的是仿真实际折线形连杆。如此,电机1绕A轴顺时针旋转θ的运动可转化为关节c的关节变量q3,电机2绕C轴逆时针旋转β的运动可以转化为关节a的关节变量q1,且有

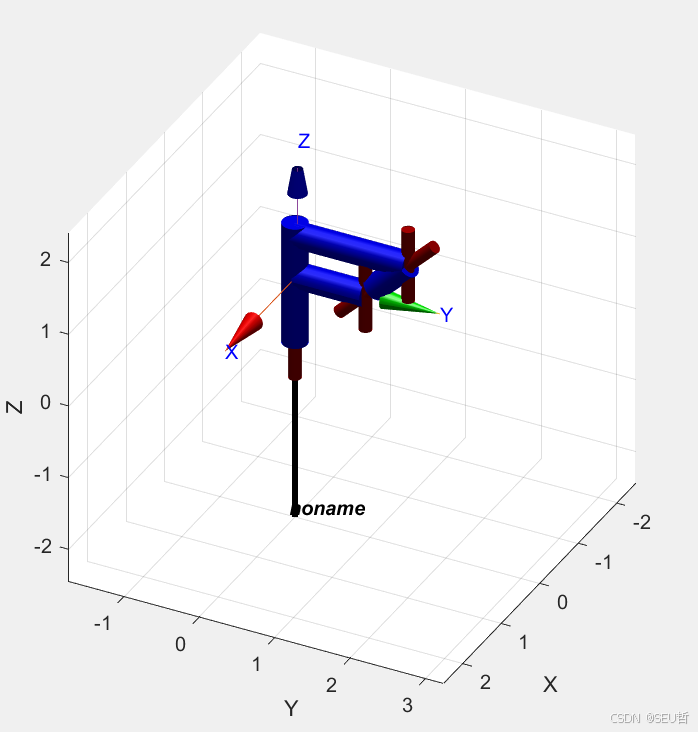
编写matlab代码,对2-DOF水刀头建模,将水刀头(即末端执行器)处的坐标系初始化为与参考坐标系同一姿态,并保证初始位姿下C轴与参考坐标系的Z轴重合,A轴在YZ平面内,与C轴成45°夹角。
仿真结果举例:改变q1,q3的值(模拟A、C轴的旋转),如下图所示。
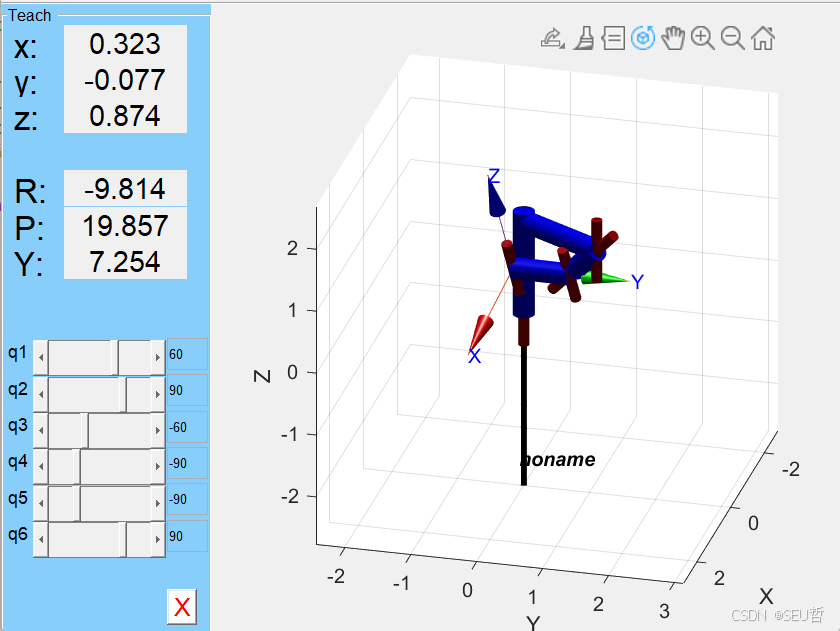
q1=60°,q3=-60°
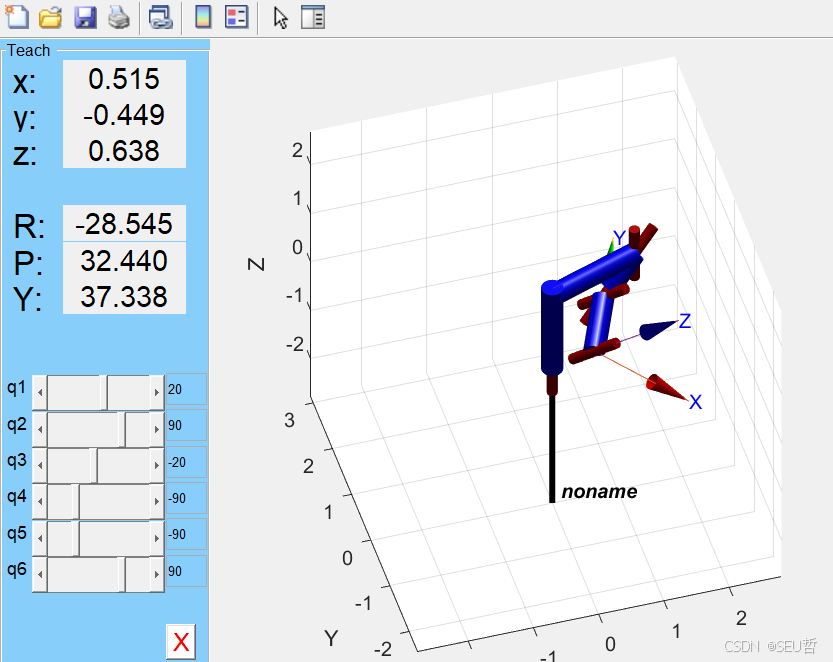
q1=20°,q3=-20°
3.2水刀头2-DOF机器人正运动学求解
3.2.1问题描述
电机1绕A轴顺时针旋转θ,电机2绕C轴逆时针旋转β,求解前倾角δ、偏摆角γ,其中喷嘴在XZ面的投影与Z轴的夹角即偏摆角γ,在YZ面的投影与Z轴的夹角即前倾角δ。
3.2.2问题分析
由于建模方法的优越性(已将喷嘴即末端执行器的坐标系Fnoa初始化为与参考坐标系Fxyz姿态相同,且喷嘴坐标系中的a轴与Z轴重合),只要求出喷嘴的坐标系a轴在XZ面的投影与Z轴的夹角即偏摆角γ,在YZ面的投影与Z轴的夹角即前倾角δ。
用正运动学函数求出经过关节变量参数组![]() 变换后喷嘴的姿态矩阵T,假设T=
变换后喷嘴的姿态矩阵T,假设T= ,提取出喷嘴的a轴方向向量
,提取出喷嘴的a轴方向向量![]() ,解算出
,解算出
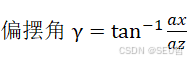 ,前倾角
,前倾角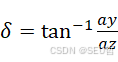
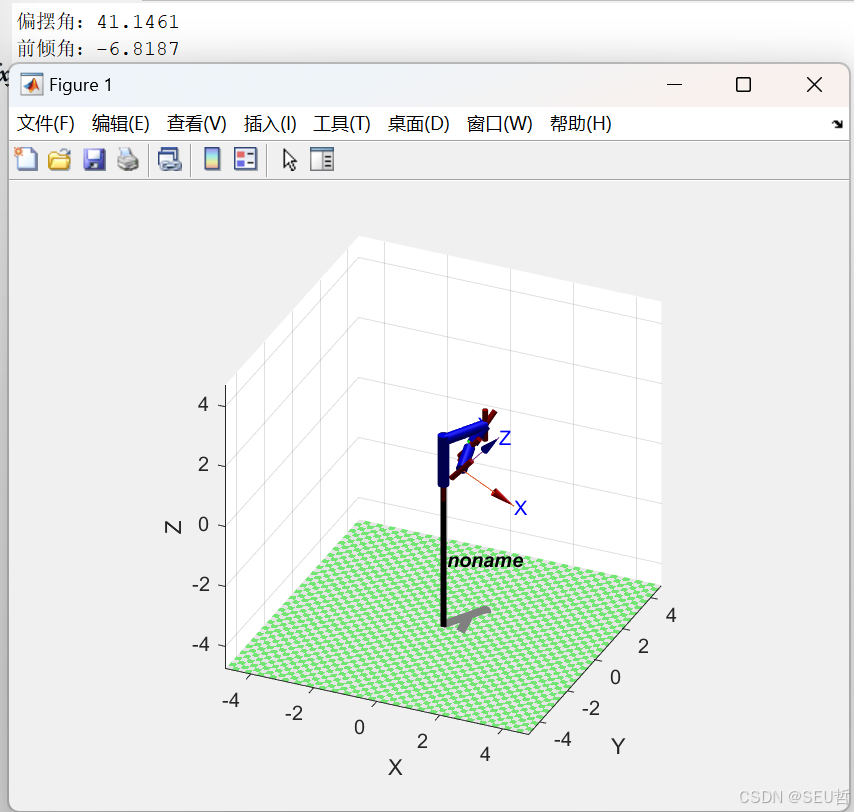
3.2.3仿真验证及分析
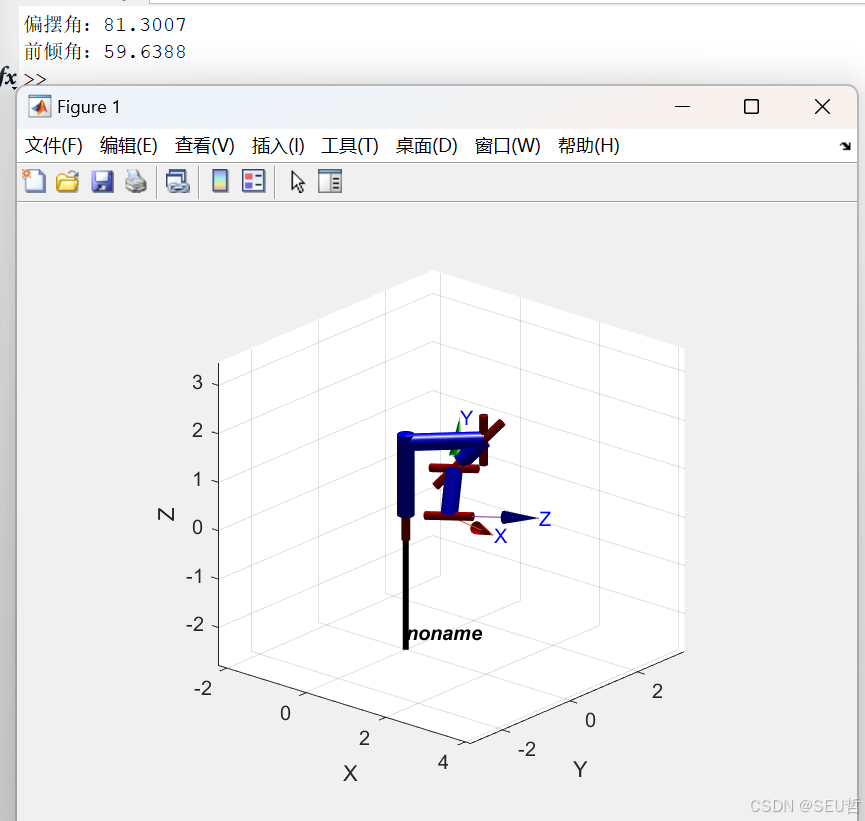
如下图所示:输入q1=pi/3,q3=-pi/6,即模拟电机1绕A轴顺时针旋转pi/6,电机2绕C轴逆时针旋转pi/3,得到偏摆角为41.1461°,前倾角为-6.8187°。
输入q1=pi/4,q3=pi/4,即模拟电机1绕A轴顺时针旋转-pi/4,电机2绕C轴逆时针旋转pi/4,得到偏摆角为81.3007°,前倾角为59.6388°。
|
|
3.3水刀头2-DOF机器人逆运动学求解
3.3.1问题描述
已知前倾角δ、偏摆角γ,求电机1绕A轴顺时针旋转的θ,电机2绕C轴逆时针旋转的β。
3.3.2问题分析
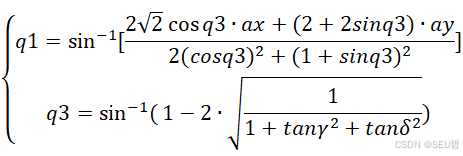
由方程组
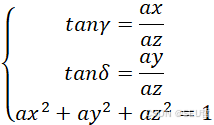
可以解出喷嘴的a轴方向向量![]()
利用matlab中的symbolic math toolbox自行构造含参数q1,q3的D-H正运动学的方程,得到喷嘴坐标系的姿态矩阵。由于矩阵是由q1,q3表示的,故可以找到三组方程,分别记为
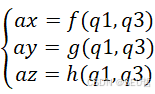
解出此方程,即可得到q1,q3的值,从而得到θ、β。
3.3.3求解过程
解上述两个方程组,得到
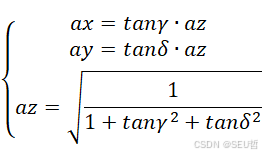

从而
3.3.4仿真验证及分析
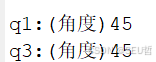
利用正运动学q1=pi/4,q3=pi/4时求出来的前倾角与偏摆角,代入上述公式求出q1,q3。
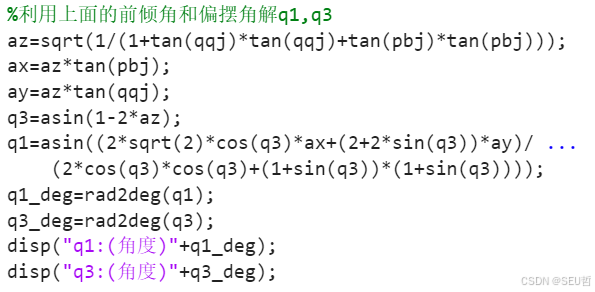
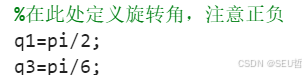
结果如下图所示;继续改变q1=pi/2,q3=pi/6,经过正运动学求出前倾角和偏摆角后,求解得到如下结果,充分证明了公式的正确性。
4拓展设计
将水刀头作为末端执行器嫁接到实验 1 所选的机器人的末端上,改变关节变量的值即可实现简单动作仿真。结果如图所示。


















 917
917

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









