






基于IPMSM内置式永磁同步电机的非线性磁链观测器仿真算法。
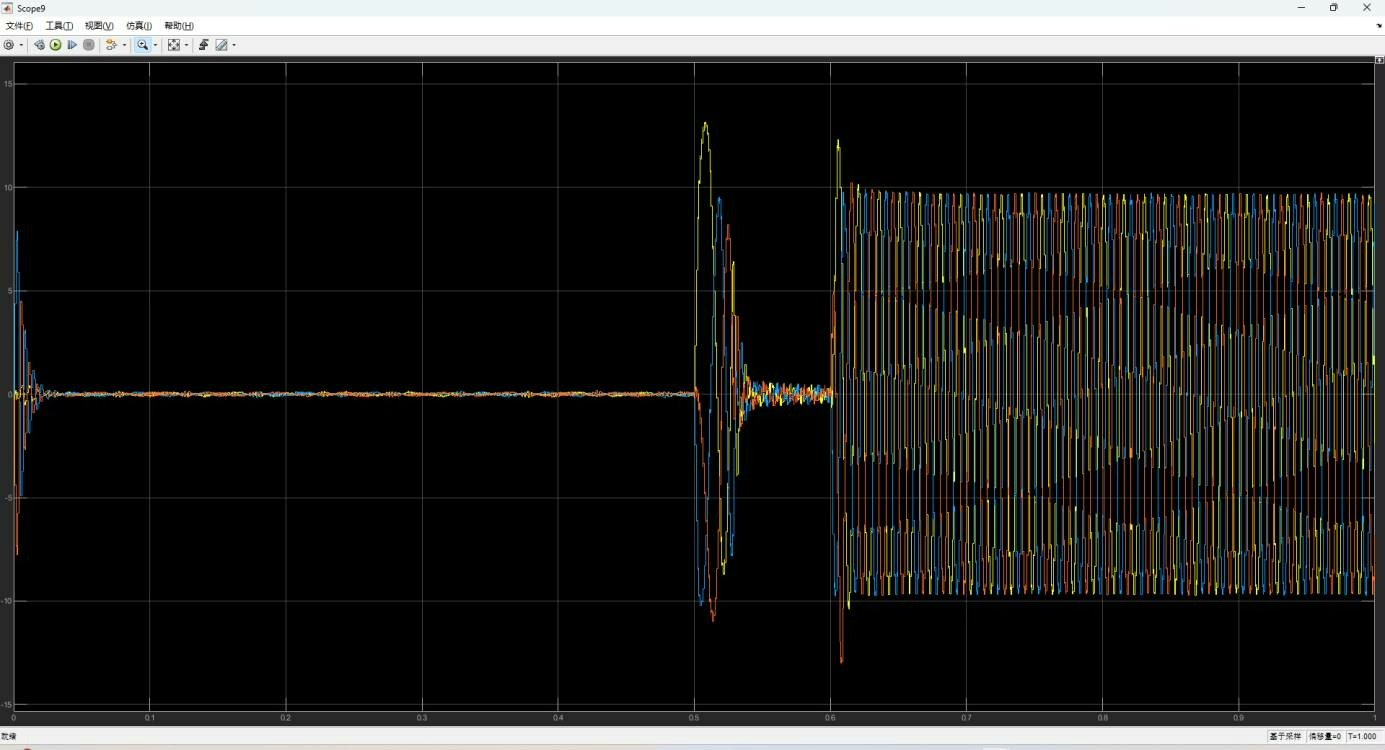
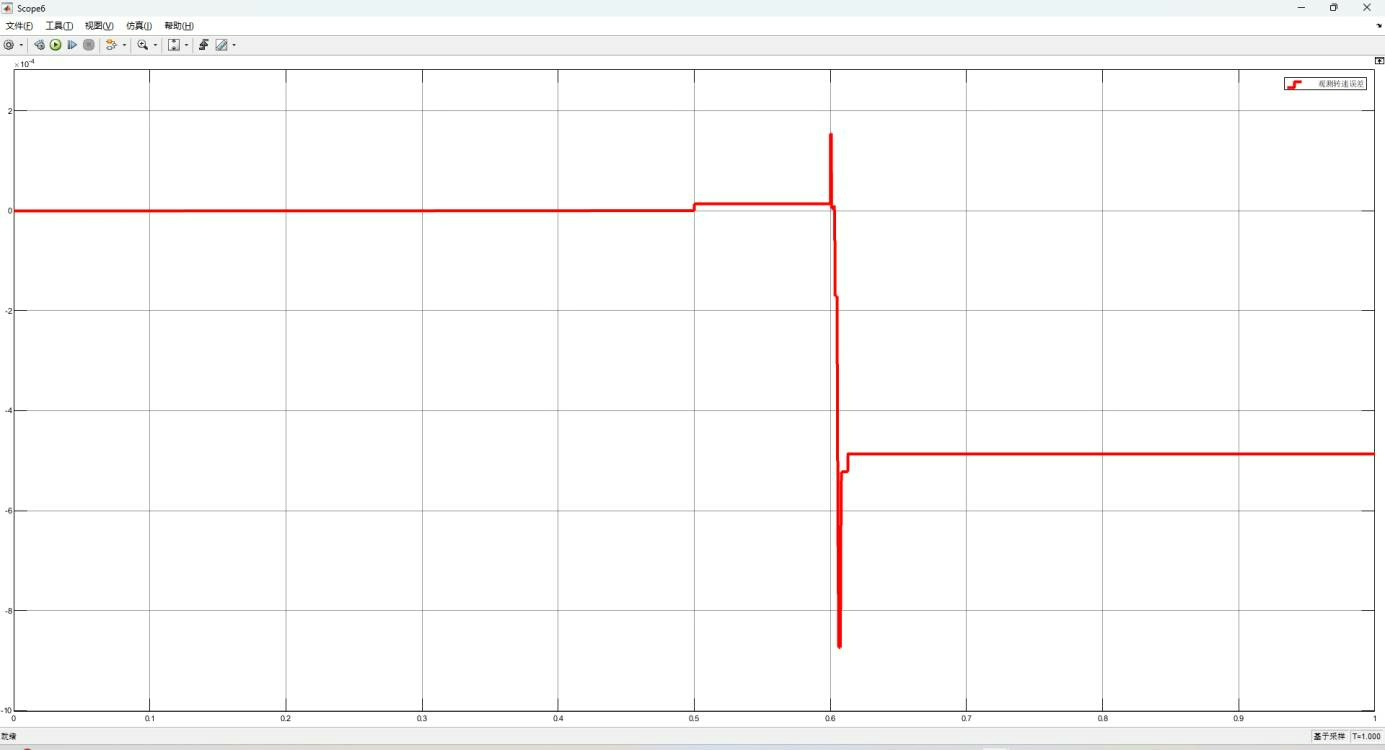
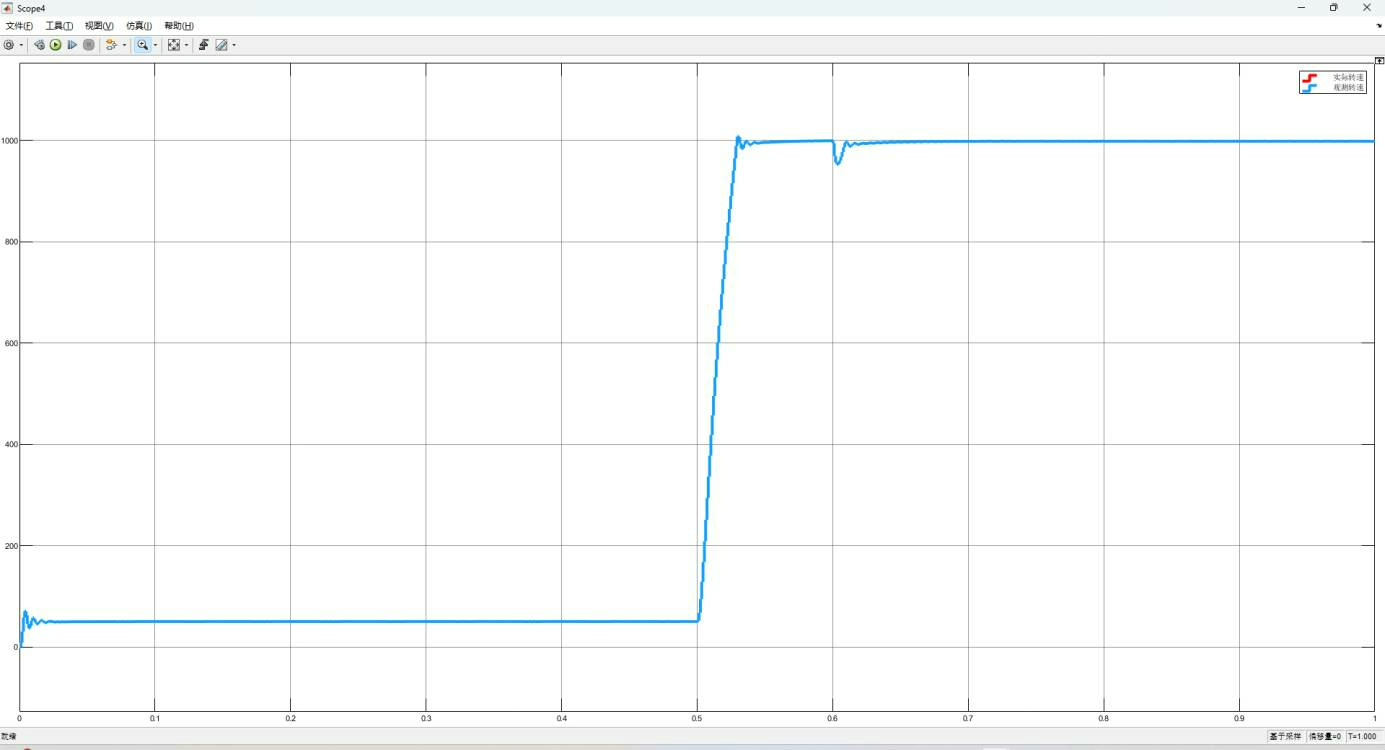
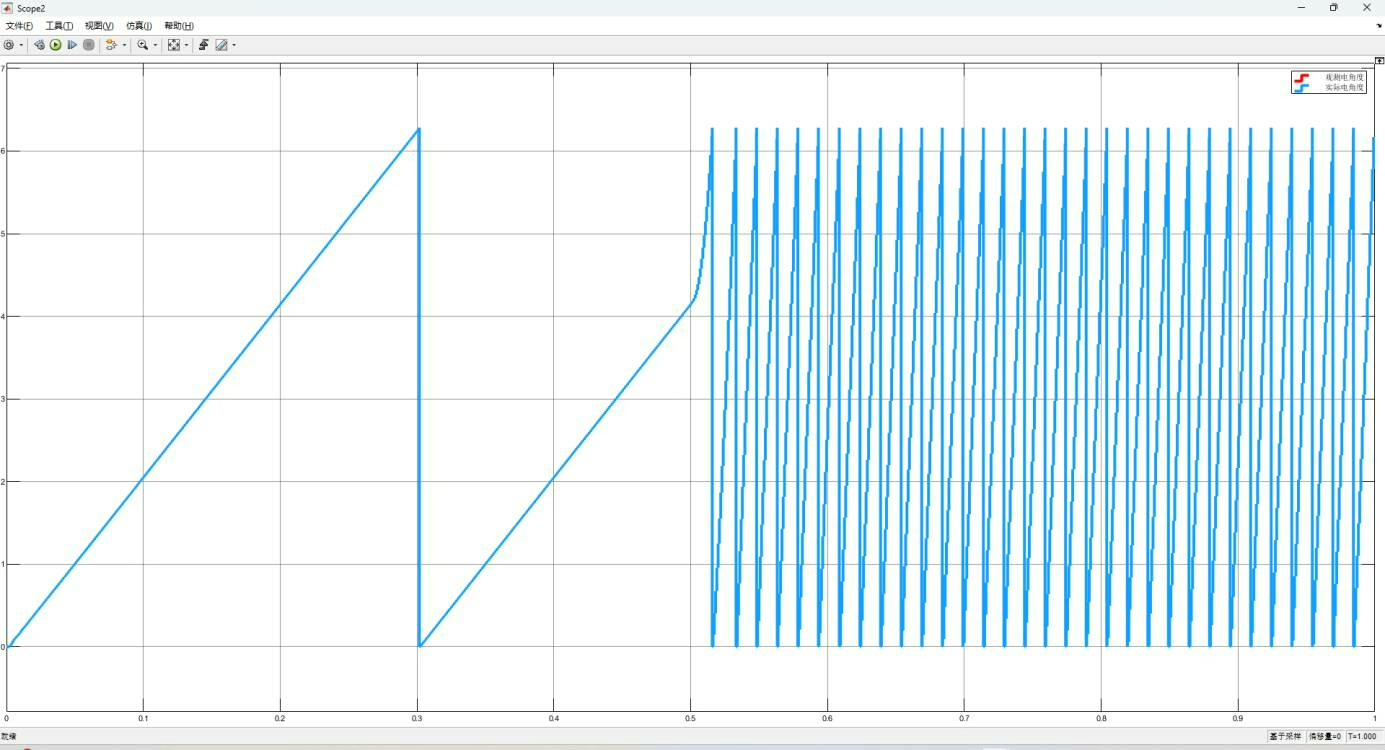
低速50rpm突变到1000rpm并且突加载,转速,电角度观测跟踪均准确。
效果较好,并提供对应复现文档。
ID:45315803048017946
Nicol

深入解析IPMSM内置式永磁同步电机的非线性磁链观测器仿真算法
一、引言
随着现代电机控制技术的不断进步,内置式永磁同步电机(IPMSM)已被广泛应用于众多领域。为了更精确地控制这类电机,提高其动态性能,特别是在转速突变及负载突变下的性能,研究人员正致力于研究一种有效的非线性磁链观测器仿真算法。本文将深入探讨这一算法,特别是在低速到高速突变以及突加载情况下的应用表现。
二、IPMSM与磁链观测器概述
IPMSM作为一种高效、高精度的电机类型,其性能在很大程度上取决于磁链观测器的准确性。磁链观测器是电机控制系统中非常重要的部分,它负责估计电机的磁链状态,为控制算法提供反馈信息。在电机的运行过程中,特别是在转速和负载突变的情况下,磁链观测器的性能直接影响电机的动态响应和稳定性。
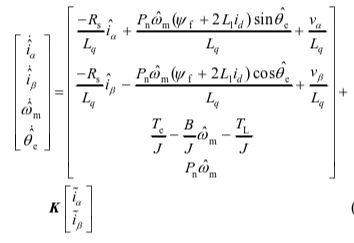
三、非线性磁链观测器仿真算法解析
针对IPMSM的内置式永磁同步电机,非线性磁链观测器仿真算法是其研究热点之一。该算法旨在通过模拟电机的非线性行为,提高磁链观测的精度。在低速50rpm突变到1000rpm并突加载的情况下,该算法能确保转速和电角度观测跟踪的准确性。这种算法通常结合了现代控制理论、电机学以及数字信号处理等多个领域的知识。
四、算法性能分析
非线性磁链观测器仿真算法在IPMSM电机控制中的效果非常明显。首先,在转速突变时,该算法能迅速调整磁链观测值,确保电机转速的准确跟踪。其次,在突加载情况下,该算法也能保证电机的稳定运行,避免因模型误差或外部干扰导致的系统不稳定。此外,该算法还能有效处理电机运行过程中的非线性问题,提高系统的整体性能。
五、复现文档提供与详细指导
为了更好地推广和应用这种非线性磁链观测器仿真算法,我们提供了详细的复现文档。该文档包含了算法的详细步骤、参数设置、实验设置等多个方面的指导信息。读者只需按照文档中的指导,即可轻松实现该算法,并将其应用到实际的电机控制系统中。这不仅降低了应用新技术的门槛,也为其在实际中的应用提供了可能。
六、结论
总的来说,非线性磁链观测器仿真算法在IPMSM内置式永磁同步电机的控制中起到了关键的作用。特别是在转速和负载突变的情况下,该算法能确保电机的稳定运行,提高系统的整体性能。本文的深入解析希望能为相关研究人员和工程师提供有价值的参考信息,推动IPMSM电机控制技术的发展。
七、建议与展望
尽管非线性磁链观测器仿真算法在IPMSM控制中取得了显著的成果,但仍有许多方面可以进一步优化和改进。我们建议未来的研究可以关注以下几个方面:算法的实时性能优化、算法的鲁棒性提升、算法的自我学习能力等。我们相信,随着研究的深入,非线性磁链观测器仿真算法将在IPMSM电机控制领域发挥更大的作用。
相关的代码,程序地址如下:http://matup.cn/803048017946.html
















 675
675

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









