










一、功能简介
使用STM32控制气泵和电磁阀的开和关,气泵和电磁阀的供电电压为12V。
二、实现过程
1、气泵和电磁阀的开和关均为开关量,实现控制方法有多种,比如继电器,但是继电器动作有噪声且体积较大,更好的方法为使用mos管。
2、mos管的选型:mos管选择主要注意两个参数即可,一是导通的电流,二是耐压值,并且常用NMOS管,根据要求,气泵和电磁阀供电电压为12V,所以选择的mos管耐压值要大于12V,这里选用耐压值为30V的MOS管,并且导通电流为5.8A,如下图
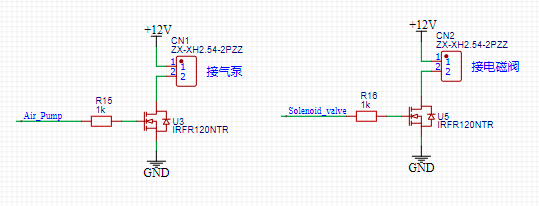
 3、气泵和电磁阀控制电路:
3、气泵和电磁阀控制电路:
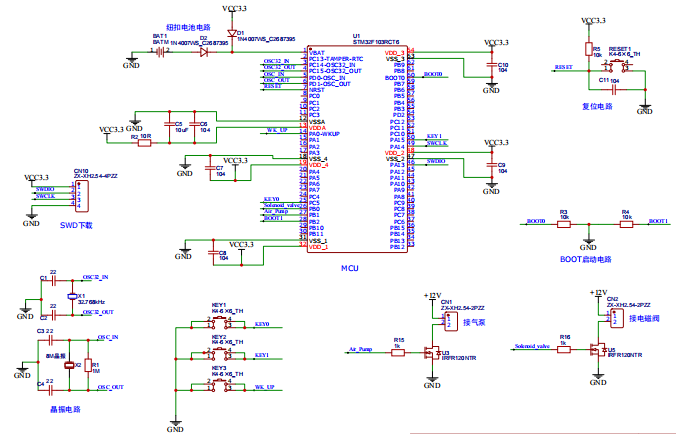
整体电路图:
4、程序代码
/* 引脚 定义 */
#define LED0_GPIO_PORT GPIOB
#define LED0_GPIO_PIN GPIO_PIN_0 //定义PB0控制电磁阀
#define LED0_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */
#define LED1_GPIO_PORT GPIOB
#define LED1_GPIO_PIN GPIO_PIN_1 //定义PB1控制气泵
#define LED1_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOB_CLK_ENABLE(); }while(0) /* PB口时钟使能 */void led_init(void)
{
GPIO_InitTypeDef gpio_init_struct;
LED0_GPIO_CLK_ENABLE(); /* LED0时钟使能 */
LED1_GPIO_CLK_ENABLE(); /* LED1时钟使能 */
gpio_init_struct.Pin = LED0_GPIO_PIN; /* LED0引脚 */
gpio_init_struct.Mode = GPIO_MODE_OUTPUT_PP; /* 推挽输出 */
gpio_init_struct.Pull = GPIO_PULLUP; /* 上拉 */
gpio_init_struct.Speed = GPIO_SPEED_FREQ_HIGH; /* 高速 */
HAL_GPIO_Init(LED0_GPIO_PORT, &gpio_init_struct); /* 初始化LED0引脚 */
gpio_init_struct.Pin = LED1_GPIO_PIN; /* LED1引脚 */
HAL_GPIO_Init(LED1_GPIO_PORT, &gpio_init_struct); /* 初始化LED1引脚 */
LED0(1); /* 初始状态,关闭电磁阀 */
LED1(1); /* 初始状态,关闭气泵 */
}
int main(void)
{
uint8_t key;
HAL_Init(); /* 初始化HAL库 */
sys_stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */
delay_init(72); /* 延时初始化 */
led_init(); /* 初始化LED */
key_init(); /* 初始化按键 */
LED0(0); /* 先点亮LED0 */
while(1)
{
key = key_scan(0); /* 得到键值 */
if (key)
{
switch (key)
{
case WKUP_PRES:
LED0_TOGGLE(); /* 电磁阀开关状态取反 */
break;
case KEY1_PRES:
LED1_TOGGLE(); /* 气泵开关状态取反 */
break;
case KEY0_PRES:
LED0_TOGGLE();
LED1_TOGGLE(); /* 电磁阀和气泵开关状态同时取反 */
break;
}
}
else
{
delay_ms(10);
}
}
}最终实现单片机控制气泵和电磁阀的开和关。
三、程序源码下载链接


















 5442
5442

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











