







本文内容为原创,转载请注明来自Jasmine_shine的专栏。
在很多项目调试下,我们都想将控制台输出的信息打印到某个txt文件中,然后采用网上的方法还是不能更新信息,只能打印一次的信息,估计是最后一次的。在对它失望之后,采用了所谓的重定向的方法,测试能更新输出。
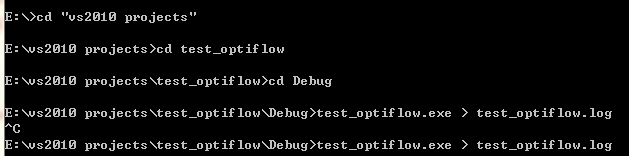
如在cmd环境下,执行文件名为:ttt.exe,想保存输出结果到ttt.log文件,可以如下操作:
ttt.exe > ttt.log执行你要运行的程序,在cmd环境下进入项目的位置,主要是存放在项目名.exe文件的位置,执行
ttt.exe > ttt.log
即可。
例如:
e: //是直接进入e盘cd vs2010_projects //进入工程,找到exe存放的位置,一般在debug文件夹此时在控制台输出的信息就会输出在ttt.log文件夹中。并不需要单独运行程序了,并且数据自动保存在.log文件中,方便查看。
关于采用cmd进入各种盘,命令跟Linux的命令已经大不一样了,具体可以参考:
http://jingyan.baidu.com/album/af9f5a2d20253343140a450f.html?picindex=2















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









