






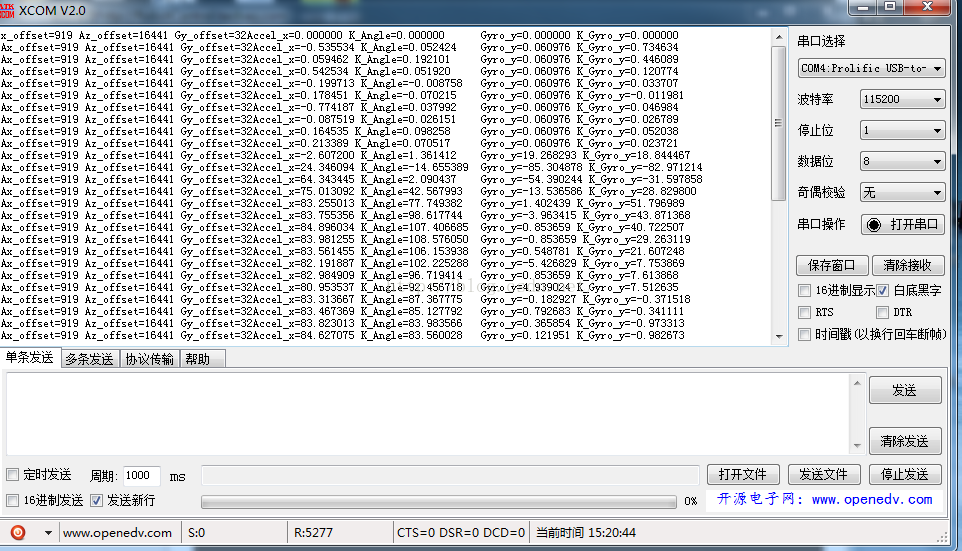
最近在学习卡尔曼滤波算法,算法 首先静止传感器,先测量100次,求平均值,求出偏差Ax_offset Az_offset Gz_offset.以后每次测量值 都减去这一偏差。然后通过加速度测得的Ax,Az通过 atant(Ax,Az)计算Accel_x 即是Roll,K_Angle 是klman以后的Roll,Gyro_y为陀螺仪Y轴加速度,K_Gyro_y为卡尔曼之后的数值,
klman是融合Accel_x 和Gyro_y,得到的结果。
下图为串口发上来的数据分析。
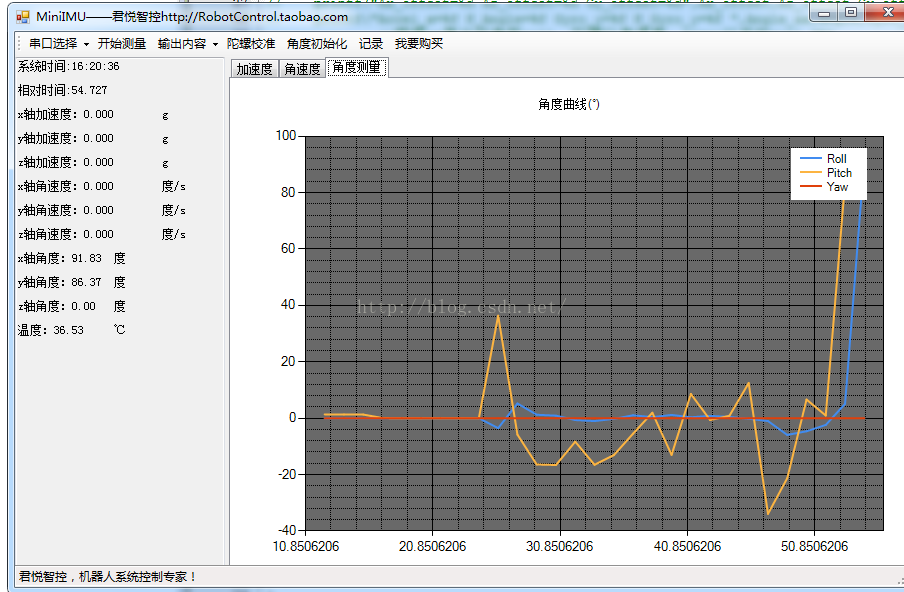
下图为使用一个软件得出的 Roll为klman以后的角度,Pinch为原始角度。可以看出klman对震动表现较好。但是效果并不是很明显。















 9402
9402

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









