






Lane Confidence Assessment and Lane Change Decision for Lane-level Localization
车道置信度评估与车道变更决策用于车道级定位

Abstract
本文介绍了一种用于车道变更决策的车道标记置信度评估算法及其在车道级定位中的应用。车道标记信息对于判断驾驶操作是跟随车道还是变更车道至关重要。此外,还应考虑到由于车道标记磨损或标记上的泥土、积雪、障碍物导致检测到的车道标记可能是错误的。因此,评估车道的置信度是必要的。通过使用视觉传感器检测到的车道两侧的检测结果以及车载传感器测量的车辆状态,提出了一种基于概率数据关联滤波器(PDAF)的车道置信度评估算法。同时,利用PDAF的估计结果,还提出了车道变更决策算法。所提出的算法通过实地测试数据进行了实验验证。
关键词:车道置信度、车道变更决策、驾驶操作、车道级定位。
1. INTRODUCTION

随着基于全球定位系统(GPS)的导航系统日益普及,先进的驾驶辅助系统(ADAS)开始使用GPS来提高它们的性能。为了实现高级ADAS,有必要实现车道级定位,特别是车道级的横向位置,以评估侧面碰撞的风险[1]。此外,高精度的位置信息可以是全自动驾驶或半自动驾驶车辆中最重要的因素。
文献中的车载导航和定位技术按信息源分类[2]。当使用高精度GPS时,车载定位问题容易解决。然而,在低成本GPS的情况下,它变成了更具挑战性的问题。为了解决这些问题,将GPS与车载传感器融合是一种流行的方法[3, 4]。然而,车道级定位的精度仍然有限。另一种车道级定位的方法是使用感知传感器(例如,增强型数字地图、视觉或激光雷达传感器)或车对车通信。在[11]中,通过雷达和视觉传感器实现了车道级定位。利用车辆识别和护栏识别结果来确定自车所在的车道。同时,也识别驾驶操作以确定变道操作。同样在本文中,许多研究使用车道信息来实现车道级的定位。因此,车道的检测结果主导了车道级定位的性能。因此,评估车道条件是否可靠是重要的。关于基于车道检测结果的车道估计和跟踪的研究有一些[5 - 8],然而,对车道置信度评估的研究相对较少。

为了应对第 2 节中提到的问题,本节提出了车道置信度评估算法。在本文中,我们对车道置信度进行了随机评估。很少有论文引入动态模型来估计车道[5-8]。其中一些主要只关注车辆的行为[5, 6]。[5]在状态估计中考虑了纵向速度和偏航率。在[6]中,提出了一个从自行车模型和视觉动力学推导出来的组合模型。其余的研究不仅考虑了车辆状态,还考虑了道路几何。在[7, 8]中,考虑了描述道路几何的元素,如道路曲率或与车道的相对航向角,以建立动态模型。
本文提出了车道置信度评估和车道变更决策算法,以协助车道级定位的性能。车道置信度评估算法基于随机方法论。它是通过利用概率数据关联滤波器实现的。车道变更决策算法考虑了车辆变更车道时的车道模式。本文的组织结构如下:第2节定义了车道检测的问题。然后,第3节和第4节分别介绍了车道置信度评估和车道变更决策算法。接着,第5节讨论了实验验证。最后,第6节给出了结论。
2. PROBLEM STATEMENTS
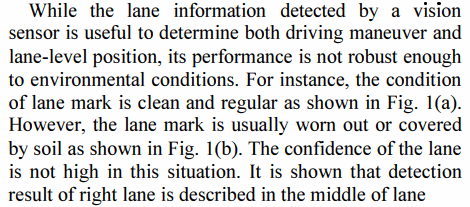
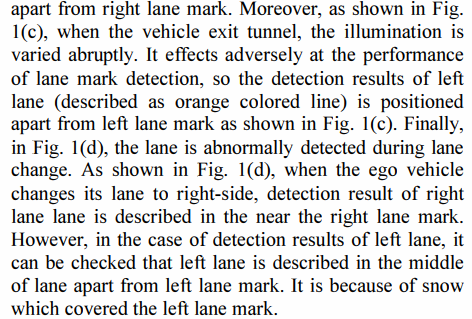
虽然视觉传感器检测到的车道信息对于确定驾驶操作和车道级位置非常有用,但其性能对环境条件的适应性并不强。例如,如 图1(a) 所示,车道标记的清晰度和规律性是好的。然而,车道标记通常磨损或被土壤覆盖,如 图1(b) 所示。在这种情况下,车道的置信度并不高。检测结果显示,右车道的检测结果描述在车道的中间,而不是紧靠右车道标记。此外,如 图1© 所示,当车辆驶出隧道时,照明条件会突然变化。这对车道标记检测的性能产生不利影响,因此左车道(以橙色线条表示)的检测结果位置偏离了左车道标记,如 图1© 所示。最后,在 图1(d) 中,在变道过程中车道被异常检测。如 图1(d) 所示,当自车向右侧变道时,右车道的检测结果描述靠近右车道标记。然而,在左车道的检测结果中,可以发现左车道描述在车道中间,而不是紧靠左车道标记。这是因为积雪覆盖了左车道标记。
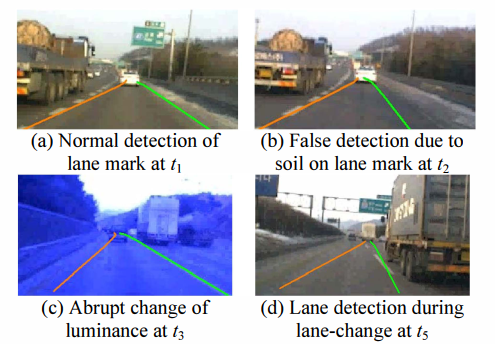

具体来说,错误的车道检测结果如 图2 所示。图1(a) 和 (b) 描述的场景的车道检测结果在 图2 中有所描述。在 图2 的 t1 时刻,两条车道都被规律性地检测到。然而,由于土壤覆盖了右车道标记,在 图2 的 t2 时刻,右车道被异常检测到。
3. LANE CONFIDENCE ASSESSMENT

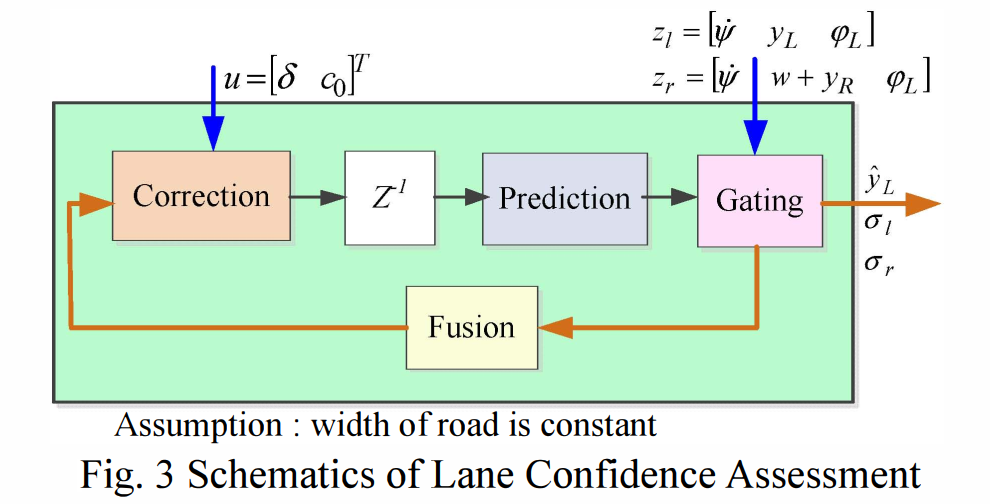
为了评估车道置信度,假设车道宽度是恒定且已知的。本文的主要思想是利用随机方法来确定车道偏移是否被错误检测。使用由残差和每个车道的协方差矩阵导出的马氏距离来识别车道置信度。当距离低于阈值时,车道置信度被确定为高。相反,如果距离较高,车道置信度被确定为低。为了导出残差和协方差矩阵,本文使用了基于离散卡尔曼滤波的概率数据关联滤波器(PDAF)。正如文献[9]中所熟知的,PDAF由四个部分组成:预测、门限、数据融合和校正。
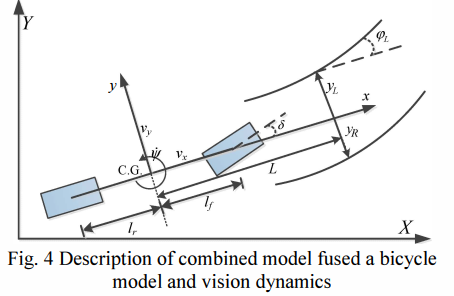
对于PDAF的预测,本文提出了一个融合了自行车模型和视觉动力学的综合模型,如[6]中所述。这也在 图4 中进行了描述。自行车模型被用作动态模型,因为它在高速下表现良好,并且能够很好地描述车辆行为[10]。状态方程和估计误差协方差是:
其中
v
y
v_y
vy 和
ψ
˙
\dot{\psi}
ψ˙ 分别表示自车横向方向的速度和偏航率,
y
L
y_L
yL 和
φ
L
\varphi_L
φL 分别是自车中心到左车道标记的横向偏移和道路切线与车辆方向之间的角度。这在 图4 中有描述。状态转移矩阵定义为:
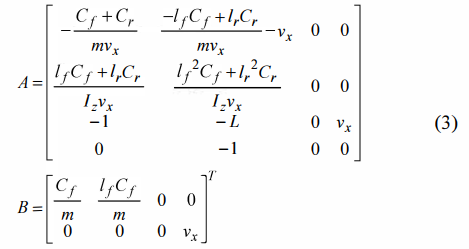
在这里,
C
f
C_f
Cf 和
C
r
C_r
Cr 分别表示前轮和后轮的角刚度,
l
f
l_f
lf 和
l
r
l_r
lr 分别表示从前轴和后轴到车辆质心(C.G.)的距离,如 图4 所示。
m
m
m 和
I
z
I_z
Iz 分别是车辆的质量以及绕 z 轴的惯性矩。
v
x
v_x
vx 表示纵向方向的速度,
L
L
L 是视觉动力学的前瞻距离,如 图4 所示。最后,控制输入
u
=
[
δ
c
0
]
T
u = [\delta\ \ \ c_0]^T
u=[δ c0]T,其中
δ
\delta
δ 是转向角,
c
0
c_0
c0 是道路曲率。
视觉动力学怎么理解?kimi:

由于在过程中使用了概率数据关联滤波器(PDAF),因此需要定义多个测量向量集合。在本文中,测量的数量始终为 2 ,并且定义为:

偏航率
ψ
˙
\dot \psi
ψ˙ 是由车载传感器测量的,而
y
L
y_L
yL、
y
R
y_R
yR 和
φ
L
\varphi_L
φL 是由视觉传感器测量的。
y
R
y_R
yR 表示自车中心到右车道标记的横向偏移。
w
w
w 表示车道宽度,假设为3.5米。
对于校正步骤:


门限处理是确定在(2)中定义的
z
1
z_1
z1 和
z
2
z_2
z2 是否适用于测量更新的过程。首先,定义了比较残差马氏范数与门限阈值的方程,如下所示:

其中
ϵ
\epsilon
ϵ 是一个阈值,
r
j
(
k
)
r_j(k)
rj(k) 和
S
(
k
)
S(k)
S(k) 分别定义为:


其中下标
j
=
l
,
r
j = l, r
j=l,r 分别表示左车道和右车道。根据不等式条件(6),车道的置信度,表示为
σ
j
\sigma_j
σj,定义为:


在门限阶段确定置信度后,数据融合继续进行以推导残差。为了在校正中使用,推导残差是必要的。存在多个测量集合,因此需要考虑权重因子来制作残差。关于每个测量的权重因子推导如下:

最终,使用在(8)中推导出的权重因子,用于(5)中的残差定义为:


通过这个车道置信度评估算法,可以确定车道是否可靠。此外,还可以在不参考车道置信度的情况下估计车道偏移。在本文中,车道变更决策是通过比较车辆变道时左车道和右车道标记的横向偏移来执行的。由于横向偏移是车道变更决策算法的主要元素,因此需要使用横向偏移的估计结果,而不是直接使用视觉传感器测量的横向偏移。因此,为了更好地识别驾驶操作,(5)中的估计结果被用于决策算法中。
4. EXPERIMENTAL VALIDATION
所提出的车道置信度评估和车道变更决策算法已经通过实地测试数据进行了验证。第一个驾驶场景是在时间
t
1
t_1
t1 时车道标记没有被正确检测到,如 图1(b) 所示。原因可能是由于标记上的土壤导致车道标记看不清楚。横向偏移、残差和车道置信度评估的时间响应如 图6 所示。
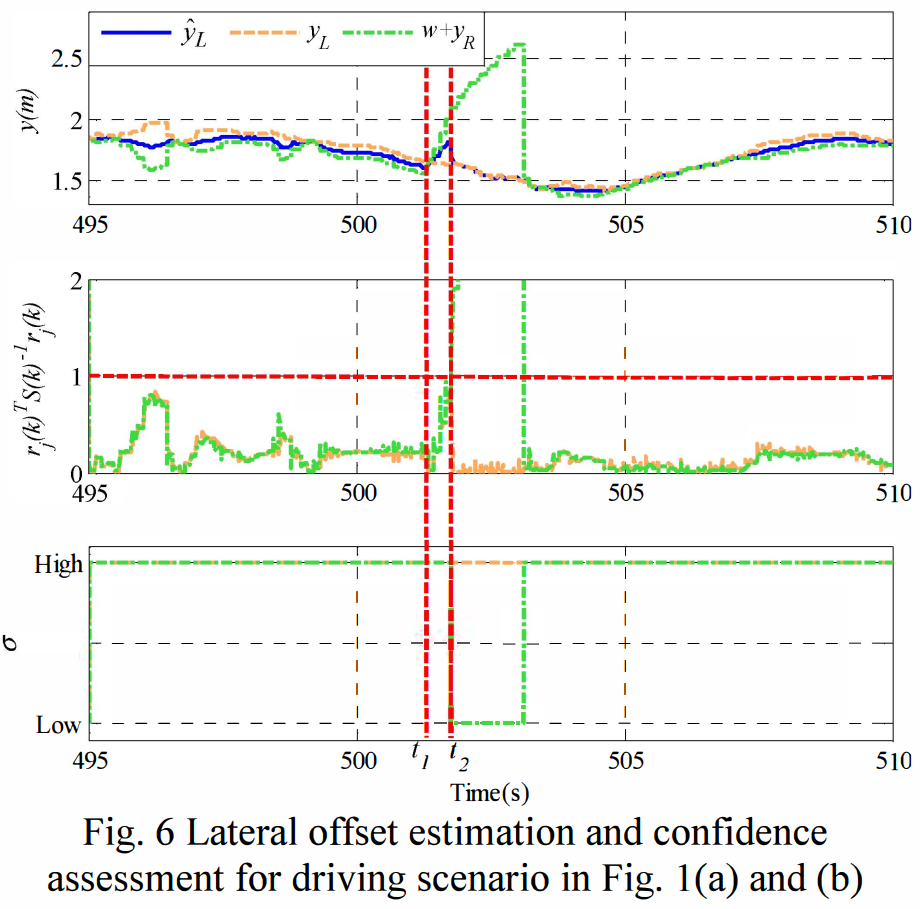
当
ϵ
=
1
\epsilon = 1
ϵ=1 在(6)中(同样参见 图6 中第二个图的虚线),显示出在时间
t
2
t_2
t2,501.78秒时,右车道标记的车道置信度变为低。当将置信度评估结果与实地数据的视觉图像进行比较时,显示出在实际驾驶情况的0.45秒后,车道置信度被正确评估(参见图1(b))。此外,如 图6 的第一个图所示,相对于右车道标记的横向偏移被正确估计。
第二个驾驶场景如 图1( c)和(d) 所示。当车辆驶出隧道时,在时间
t
3
t_3
t3 光照突然变化,左车道标记被异常检测到,其横向偏移从 图7 的第一个图中的1.0234米减少到0.6523米。然后,左车道的残差变得大于阈值,导致在 280.10 秒时左车道标记的车道置信度降低。如果与实地数据的视觉图像进行比较,这个评估是在1.1秒后完成的。此外,如 图7 顶部第一个图所示,横向偏移被很好地估计。
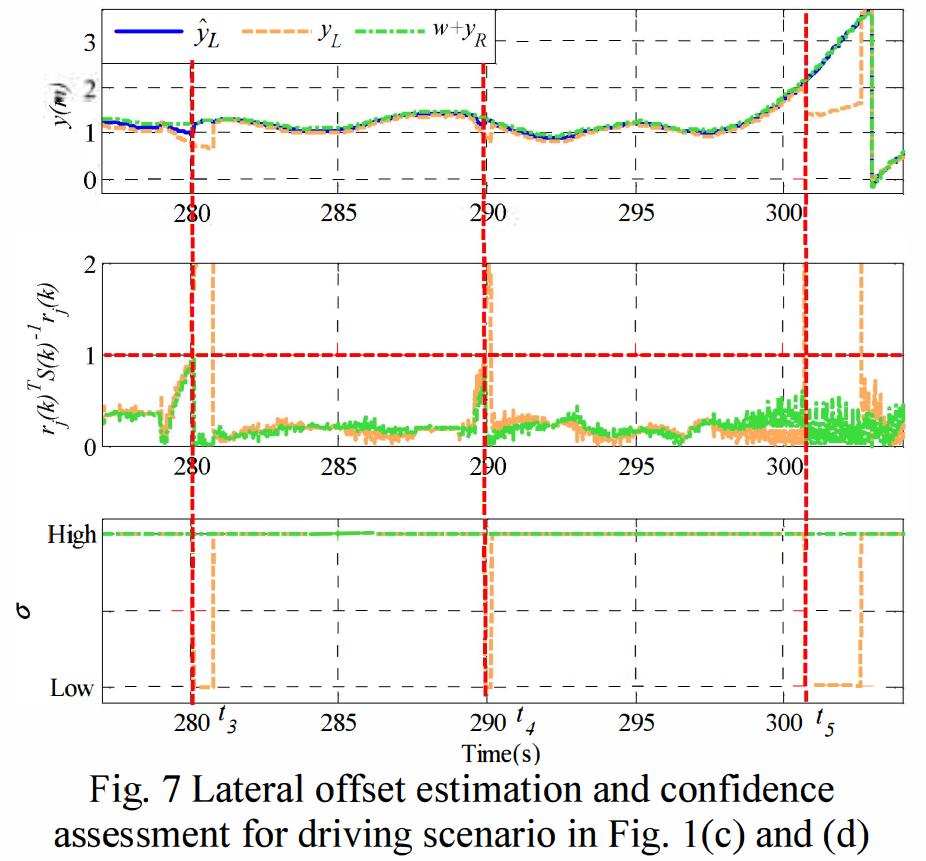
在
t
4
t_4
t4 左右,由于车道标记磨损导致左车道标记异常检测,这是一个与 图1(b) 中介绍的类似问题。左车道的横向偏移从1.316米开始减少,直到0.8125米,持续了0.58秒。然后,在
t
4
t_4
t4,289.96秒时,左车道的残差大于阈值,左车道的车道置信度变为低。与图像相比,这个评估是在0.41秒后完成的。
此外,如 图1(d) 所示,当车道向右侧变更时,由于车道标记状况不佳,左车道标记被异常检测。其横向偏移因此在
t
5
t_5
t5 时从2.0430米减少到1.3984米。然后,左车道的残差变得大于阈值,导致在300.73秒时左车道标记的车道置信度降低。与图像相比,这个评估是在完全相同的时间完成的。此外,如 图7 顶部 第一个图所示,横向偏移被很好地估计。
在 图7 中的297.33秒时,车辆开始向右侧变道。值得注意的是,当考虑到左车道置信度较低时,左右车道的变化模式是不同的。直接使用检测结果来确定车道变更是困难的,因为车道变更决策算法不仅考虑横向偏移,还考虑车道的变化模式。然而,当利用 图7 顶部第一个图中描述的蓝线估计的横向偏移时,可以很容易地确定驾驶操作为正在进行的车道变更。
5. CONCLUSIONS
提出了一种融合视觉和车载传感器的车道置信度评估和车道变更决策算法。车道置信度评估算法能够识别检测到的车道状况是高还是低。此外,当置信度较低时,也能够决定车道变更。


在不久的将来,将对动态模型进行评估。我们将评估我们所使用的模型以及其他论文提出的模型的性能。此外,还将进行各种实验来评估所提出算法的优缺点。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









