








之前的全部示例代码,我们都是用默认的单线程来处理任务,但顺序执行的方式在很多时候是不能保证时效性的,因此我们有必要来看看 ros 里面怎么使用多线程来处理回调任务。
目录
- 单线程的问题:订阅多个 Topic,一个 Spinner thread
- 多线程:订阅多个 Topic,多个 Spinner threads
- 订阅一个 Topic,多个 Spinner threads
- 订阅多个 Topic,每个 Subscriber 一个 Callback queue
1 单线程的问题
现在我们设定一个场景,利用《动手学 ROS(6):命名空间之 group 与 remap》中的 multi_publisher.launch,分别以 1Hz 的速率向 A/message 和 B/message 发送消息,我们写一个接收端,其中 CallbackA 在处理 A/message 时会 sleep 2s, CallbackB 无间隔,我们来看看执行的效果。
Subscriber 代码如下:
#include <thread>
#include "ros/ros.h"
#include "std_msgs/String.h"
void CallbackA(const std_msgs::String::ConstPtr &msg)
{
std::this_thread::sleep_for(std::chrono::seconds(2));
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
void CallbackB(const std_msgs::String::ConstPtr &msg)
{
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub_b = n.subscribe("B/message", 1, CallbackB);
ros::Subscriber sub_a = n.subscribe("A/message", 1, CallbackA);
ros::spin();
return 0;
}
结果显示,CallbackB 也跟着变成 2s 的调用频率。日志如下(注意打印时间):
[ INFO] [1621391346.653984500]: I heard: [/A/message 1]
[ INFO] [1621391346.656312400]: I heard: [/B/message 2]
[ INFO] [1621391348.656641300]: I heard: [/A/message 3]
[ INFO] [1621391348.656849300]: I heard: [/B/message 4]
[ INFO] [1621391350.657389800]: I heard: [/A/message 5]
[ INFO] [1621391350.657563600]: I heard: [/B/message 6]
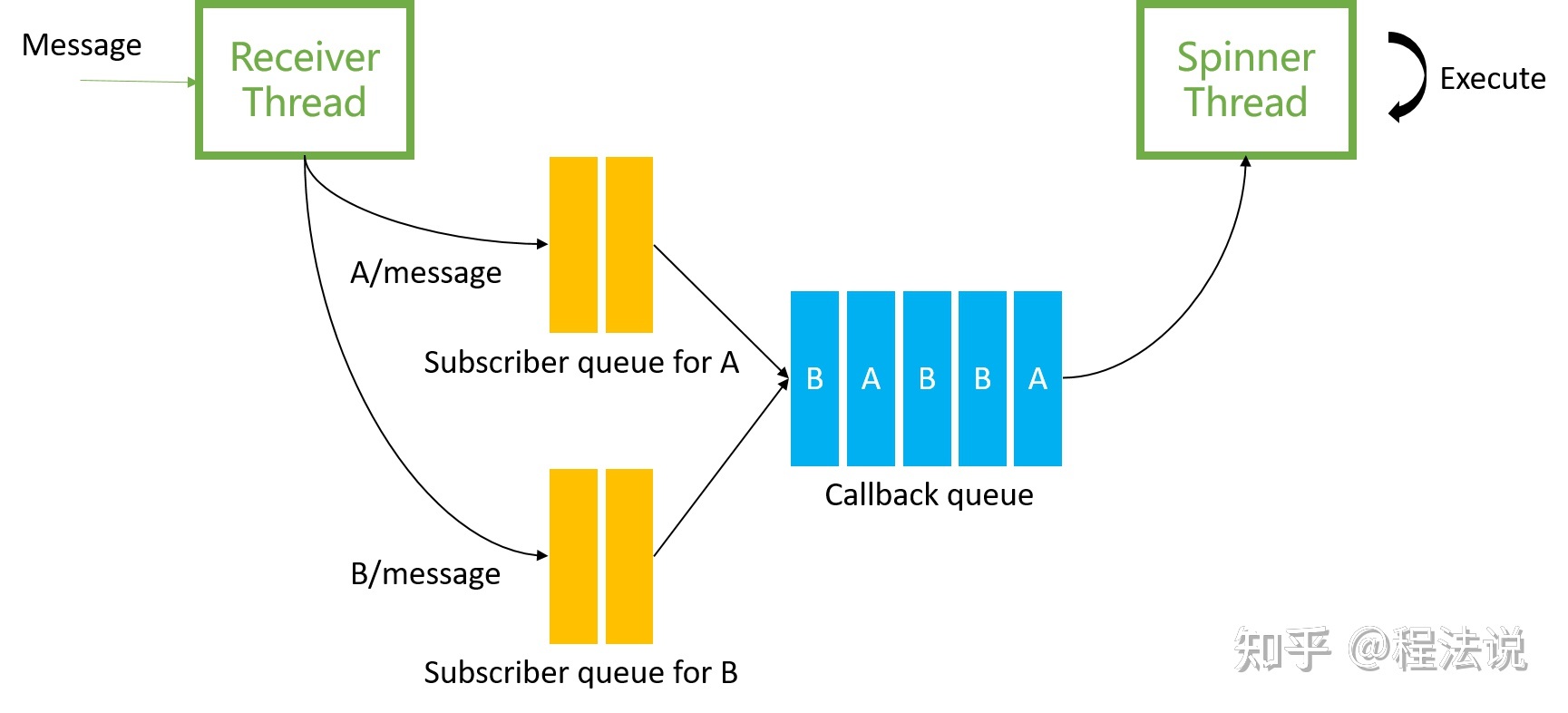
一图胜千言,在只有一个 Spinner thread 的情况下,callback queue 只能顺序执行。
这就说明了单线程的不足,不管有多少个 Subscriber,节点都只能顺序执行回调,这在某些时候是不能忍受的,因此,多线程有了用武之地,我们要做的事情就是增加 spinner thread。
2 多线程:订阅多个 Topic,多个 Spinner threads
我们修改刚刚的 Subcriber, 其实也就改了两行:
#include <thread>
#include "ros/ros.h"
#include "std_msgs/String.h"
void CallbackA(const std_msgs::String::ConstPtr &msg)
{
std::this_thread::sleep_for(std::chrono::seconds(2));
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
void CallbackB(const std_msgs::String::ConstPtr &msg)
{
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub_b = n.subscribe("B/message", 1, CallbackB);
ros::Subscriber sub_a = n.subscribe("A/message", 1, CallbackA);
//改变的地方
ros::MultiThreadedSpinner spinner(2);
spinner.spin();
return 0;
}
MultiThreadedSpinner 可初始化线程的数量,这里因为有两个 subscriber,就选择了 2。Callback 依然是 2s 调用一次。测试结果如下:
[ INFO] [1621390946.100496300]: I heard: [/B/message 1]
[ INFO] [1621390947.100450900]: I heard: [/B/message 2]
[ INFO] [1621390948.015270200]: I heard: [/A/message 1]
[ INFO] [1621390948.099850900]: I heard: [/B/message 3]
[ INFO] [1621390949.100118400]: I heard: [/B/message 4]
[ INFO] [1621390950.015475900]: I heard: [/A/message 3]
[ INFO] [1621390950.100807500]: I heard: [/B/message 5]
[ INFO] [1621390951.100232500]: I heard: [/B/message 6]
[ INFO] [1621390952.015688200]: I heard: [/A/message 5]
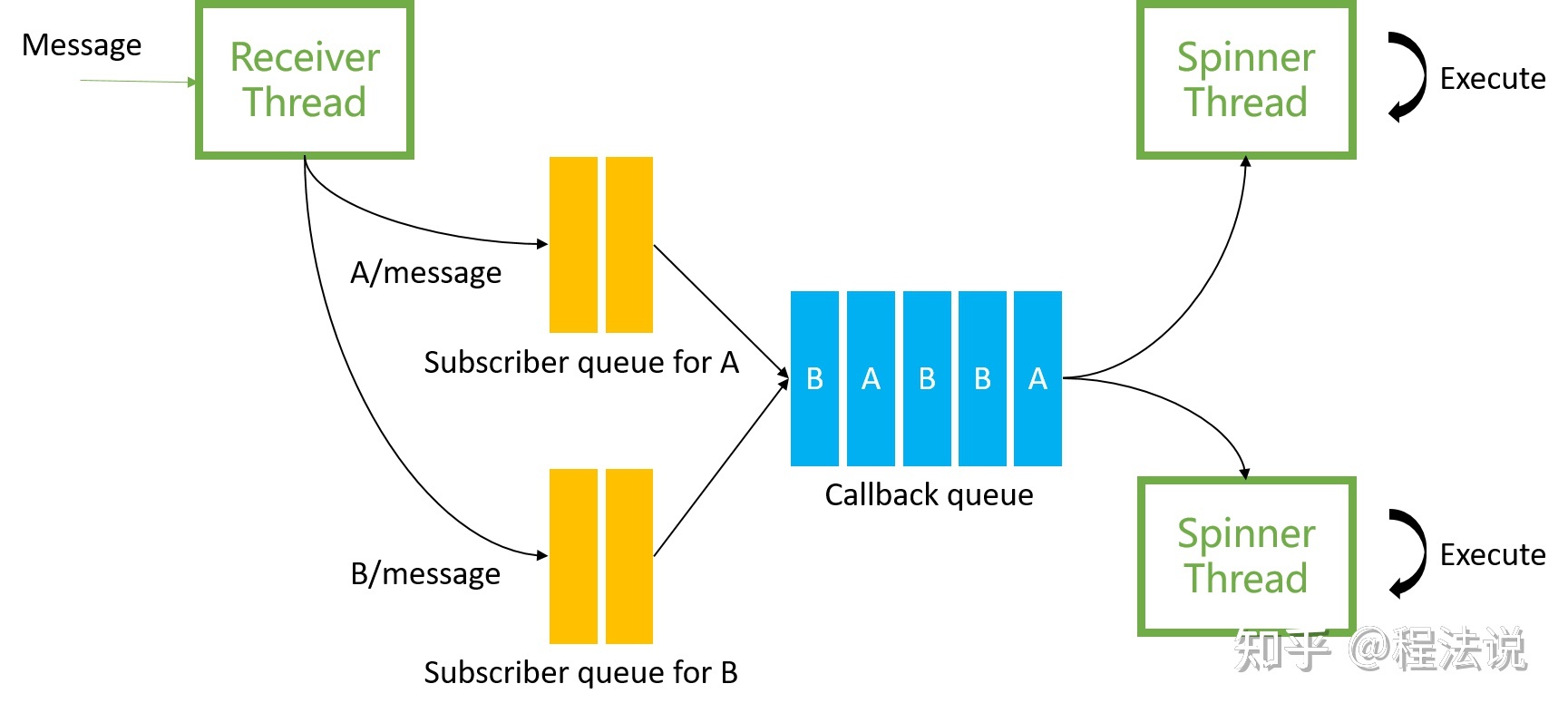
CallbackB 处理了 B/message 中的所有消息 (1,2,3,4,5,6),而 CallbackA 还是 2s 调用一次,只处理了 A/message 中编号为 1,3,5 的消息。也就是说,我们有一个空闲的线程在另一个线程被 CallbackA 占用时可以从容地处理 CallbackB。如下图:
3 订阅一个 Topic,多个 Spinner threads
假设只有一个 Topic, 发布端的频率比较高,我们又想尽可能多地响应消息,因此我们可以设置多个 Spinner,但是单纯地像上一小节一样使用 MultiThreadedSpinner 是不行的,ros 作了限制,默认阻止并行处理一个 Callback,我们需要更改 Suscriber 的配置:
#include <thread>
#include "ros/ros.h"
#include "std_msgs/String.h"
void ChatterCallback(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
std::this_thread::sleep_for(std::chrono::seconds(2));
}
int main(int argc, char **argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::SubscribeOptions ops;
ops.init<std_msgs::String>("A/message", 1, ChatterCallback);
ops.allow_concurrent_callbacks = true;
ros::Subscriber sub1 = n.subscribe(ops);
ros::MultiThreadedSpinner spinner(2);
spinner.spin();
return 0;
}
可以看到,通过设置 SubscribeOptions 的 allow_concurrent_callbacks 为 true,就可以让同一个 Callback 并行执行,结果如下:
[ INFO] [1621397291.938394800]: I heard: [/A/message 1]
[ INFO] [1621397292.938467100]: I heard: [/A/message 2]
[ INFO] [1621397293.940122300]: I heard: [/A/message 3]
[ INFO] [1621397294.938827600]: I heard: [/A/message 4]
[ INFO] [1621397295.940477900]: I heard: [/A/message 5]
[ INFO] [1621397296.939098400]: I heard: [/A/message 6]
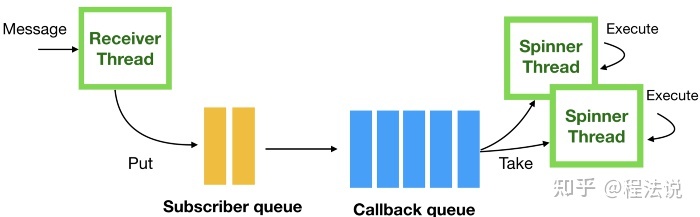
虽然 ChatterCallback 中仍然是等待 2s,但实际上却处理了每一秒接收到的消息。如图:
4 订阅多个 Topic,每个 Subscriber 一个 Callback queue
在《ROS Spinning, Threading, Queuing》的最后还提到了一种更加优秀的实践方式:
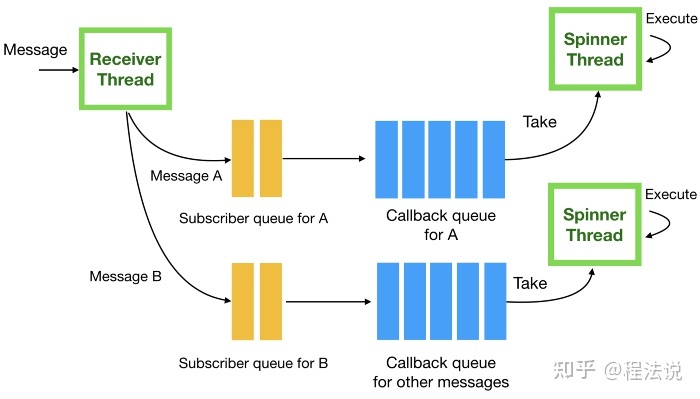
if there is only one callback queue which is FIFO queue (first in, first out), the callback for the message A cannot be processed until all three callbacks for the message B are processed. This problem can be mitigated by creating multi spinner threads as talked before, but it cannot completely solve the issue which stems from having a single callback queue.
To solve the problem, we can create a separate callback queue and spinner thread which is dedicated to the message A as shown below.
#include <thread>
#include <ros/callback_queue.h>
#include "ros/ros.h"
#include "std_msgs/String.h"
void CallbackA(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
void CallbackB(const std_msgs::String::ConstPtr& msg) {
ROS_INFO(" I heard: [%s]", msg->data.c_str());
}
int main(int argc, char **argv) {
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub_b = n.subscribe("MessageB", 1, CallbackB);
ros::NodeHandle n_a;
ros::CallbackQueue callback_queue_a;
n_a.setCallbackQueue(&callback_queue_a);
ros::Subscriber sub_a = n_a.subscribe("MessageA", 1, CallbackA);
std::thread spinner_thread_a([&callback_queue_a]() {
ros::SingleThreadedSpinner spinner_a;
spinner_a.spin(&callback_queue_a);
});
ros::spin();
spinner_thread_a.join();
return 0;
}
给每一个 subscriber 创建一个单独的 callback queue,这样就解决了即使用了 MultiThreadedSpinner 但所有的 callback 依然在同一个 queue 排除执行的问题,此方法用来解决 subscriber 的优先级问题。笔者在实际中未遇到使用该方法的地方,仅记录在此,保持文章的完整性。
小结
- MultiThreadedSpinner 可使节点多线程执行任务;
- 要使一个 Subscriber 多线程执行,需设置 SubscribeOptions 的 allow_concurrent_callbacks 为 true;
- 如果需要保证某个 Subscriber 优先执行,可配置其独立的 CallbackQueue;
- 其实还有个 AsyncSpinner 提供和 MultiThreadedSpinner 类似的功能,有机会再介绍。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









