






正常的速度曲线算法有 T 型速度曲线控制、S 型速度曲线控制、正弦加减速控制的算法,每一种算法都各有特点。

1.T 型速度曲线
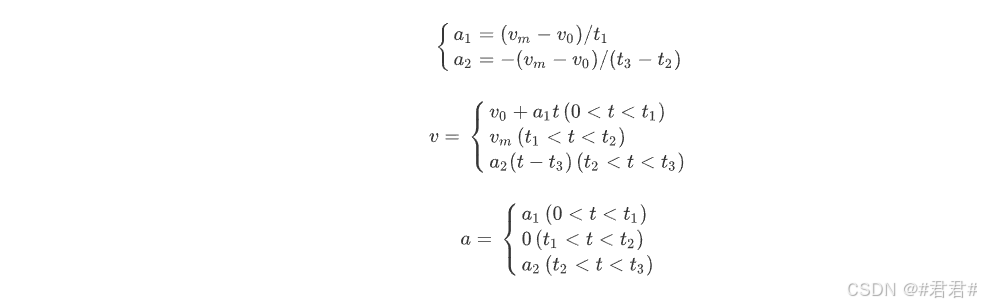
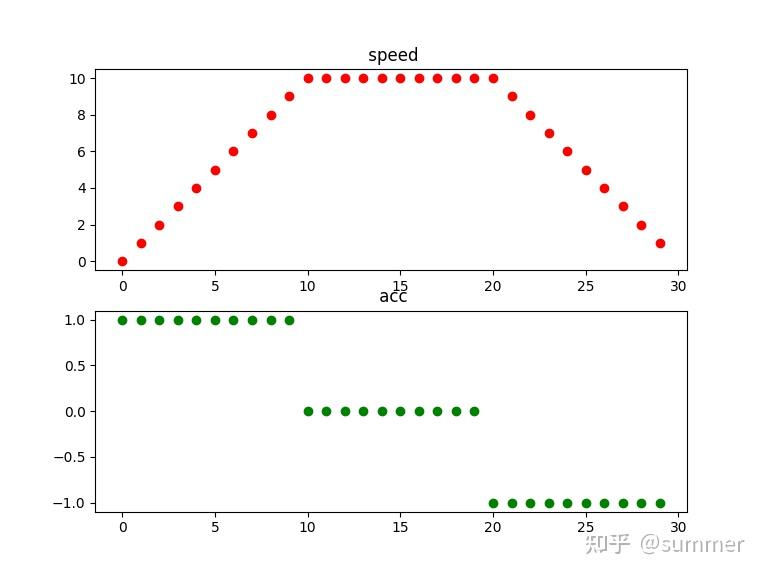
T 型速度曲线整个运动过程分为匀加速、匀速、匀减速三个阶段,在变速过程中,加速度 a 始终为设定的一个定值,给定若干个控制点,设定加速度为 a,加速度为 - a,匀速阶段速度为 vm(即整个运动最大速度),以及总的运行时间 T,则速度、加速度、加加速度曲线如下图所示:
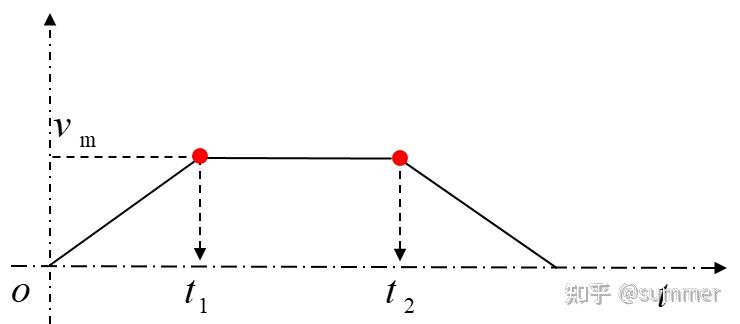
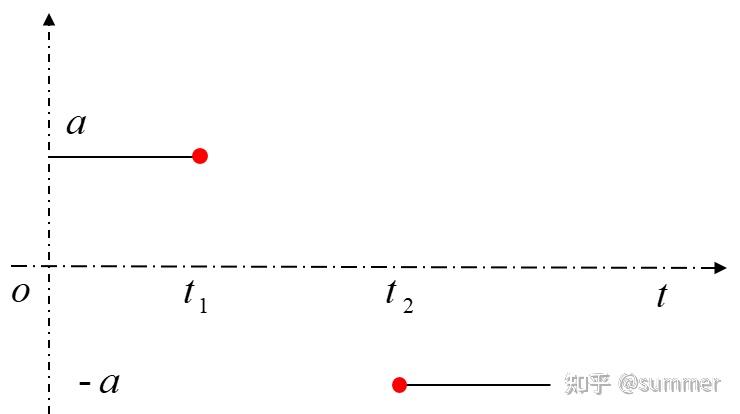
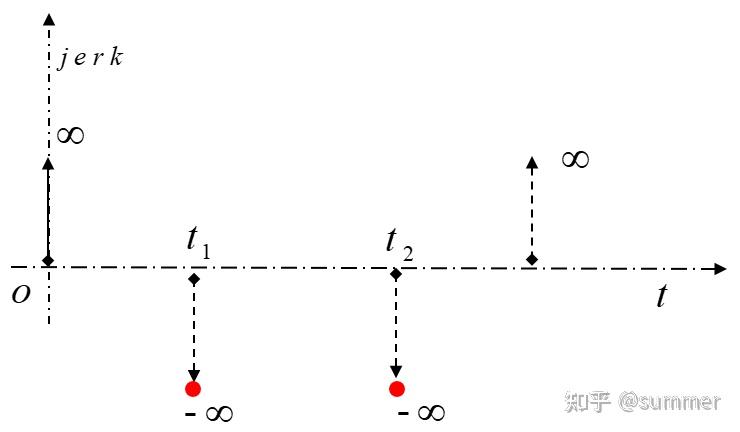
由图可知,T 型函数策略相对容易实现,但其加速度不连续,在加减速阶段与匀速阶段的衔接处,存在突变的情况,这会对车辆执行器造成冲击,影响驾乘舒适性。适用于紧急制动、矿区等对舒适性要求不高的场景。
2.S 型速度曲线
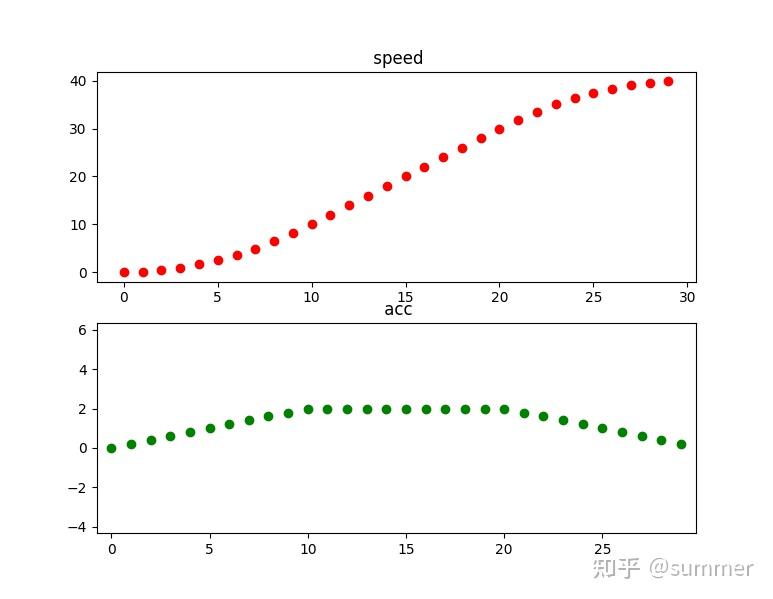
S 型速度曲线整个运动过程分为 7 个阶段,即加加速度阶段、匀加速阶段、减加速阶段、匀速段、加减速段、匀减速段、减减速段,不同阶段的速度衔接处加速度是连续的,且加速度的变化率可控,解决了 T 型速度曲线加速度存在的突变问题。S 速度曲线的速度、加速度和加加速度曲线如下所示:
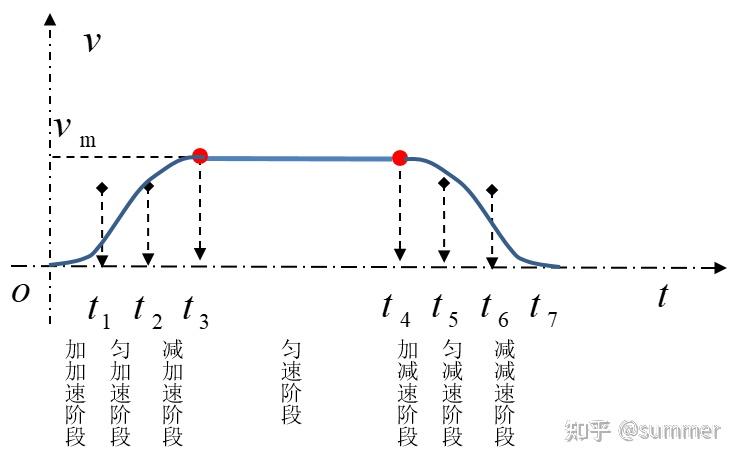
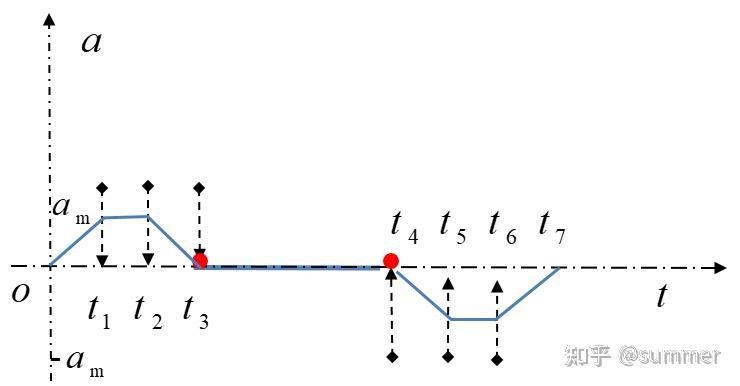
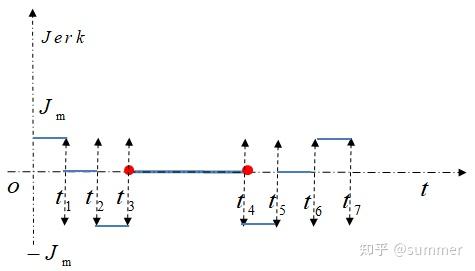
由图可知,S 型速度曲线柔性较好,解决了 T 型函数存在的加速度突变的问题,避免了车辆运动时候的柔性冲击,但由于分段较多、结构复杂,导致算法计算量较大,实现起来相对复杂。

- 代码
"""
"""
import math
import numpy as np
import matplotlib.pyplot as plt
def T_speed(t, t1, t2, t3, v0, vm):
a1 = (vm - v0) / t1
a2 = -(vm - v0) / (t3 - t2)
if (t >= 0 and t < t1):
T_v = v0 + a1 * t
T_a = a1
elif (t >= t1 and t < t2):
T_v = vm
T_a = 0
elif (t >= t2 and t < t3):
T_v = a2 * (t - t3)
T_a = a2
else:
T_v = 0
T_a = 0
return T_v, T_a
def S_speed(t, t1, t2, t3, a0, am):
J1 = (am - a0) / t1
J2 = -(am - a0) / (t3 - t2)
if (t >= 0 and t < t1):
S_a = a0 + J1 * t
S_v = a0 * t + J1 * t ** 2 / 2
elif (t >= t1 and t < t2):
S_a = am
S_v = am * t + (a0 - am) * t1 + J1 * t1 ** 2 / 2
elif (t >= t2 and t < t3):
S_a = J2 * (t - t3)
S_v = J2 * t ** 2 / 2 - J2 * t3 * t + \
(am * t2 + (a0 - am) * t1 + J1 * t1 ** 2 / 2 - J2 * t2 ** 2 / 2 + J2 * t3 * t2)
else:
S_a = 0
t = t2
vm = J2 * t ** 2 / 2 - J2 * t3 * t + (
am * t2 + (a0 - am) * t1 + J1 * t1 ** 2 / 2 - J2 * t2 ** 2 / 2 + J2 * t3 * t2)
S_v = vm
return S_v, S_a
def main():
for t in np.arange(0, 30, 1):
plt.figure(1)
[T_v,T_a] = T_speed(t, 10, 20, 30, 0, 10)
ax1 = plt.subplot(2, 1, 1)
ax2 = plt.subplot(2, 1, 2)
plt.sca(ax1)
plt.plot(t, T_v, 'or') #
plt.title(" speed" )
plt.sca(ax2)
plt.plot(t, T_a, 'og') #
plt.title(" acc")
plt.figure(2)
[S_v, S_a] = S_speed(t, 10, 20, 30, 0, 2)
ax1 = plt.subplot(2, 1, 1)
ax2 = plt.subplot(2, 1, 2)
plt.sca(ax1)
plt.plot(t, S_v, 'or') #
plt.title(" speed")
plt.sca(ax2)
plt.plot(t, S_a, 'og') #
plt.title(" acc")
plt.axis("equal")
plt.show()
if __name__ == '__main__':
main()
 T 型速度曲线 S 型速度曲线_魂淡林的博客 - CSDN 博客_s 型曲线一文教你快速搞懂速度曲线规划之 S 形曲线(超详细 + 图文 + 推导 + 附件代码)_GREYWALL-CSDN 博客_s 型速度曲线
T 型速度曲线 S 型速度曲线_魂淡林的博客 - CSDN 博客_s 型曲线一文教你快速搞懂速度曲线规划之 S 形曲线(超详细 + 图文 + 推导 + 附件代码)_GREYWALL-CSDN 博客_s 型速度曲线

















 839
839

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









