







1. dq模型
ver增益0.0314
hor增益0.0314
phase增益74.7960
D-axis对齐
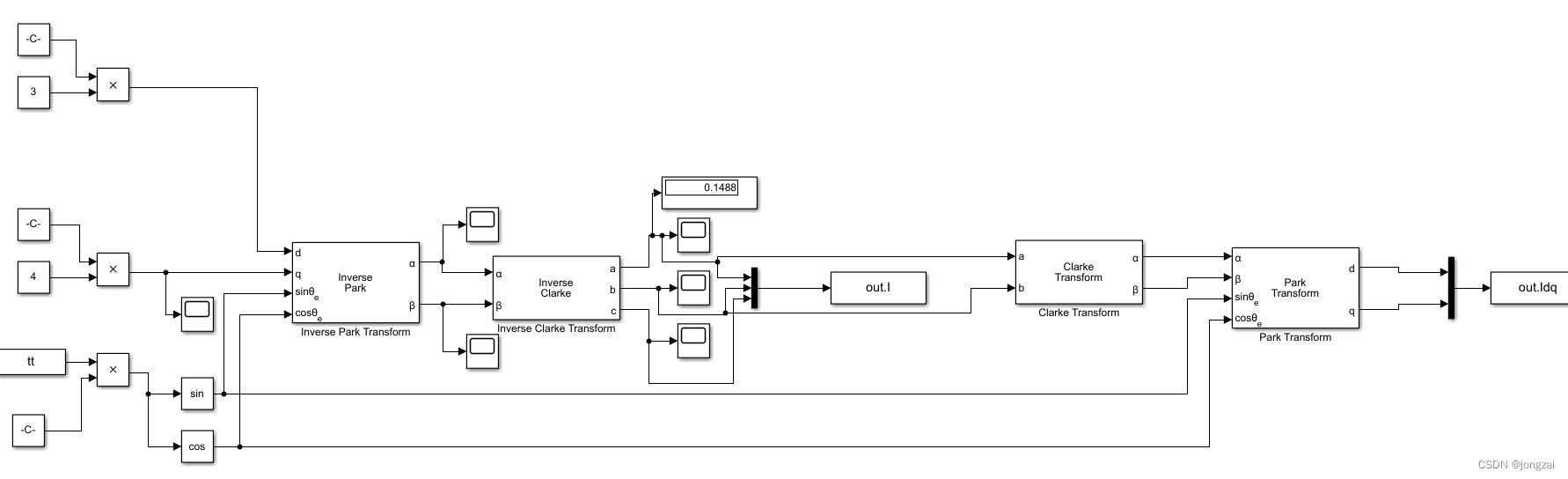
运行结果:
i_alpha幅值0.0314xsqrt(3x3+4x4)=0.157安培
i_beta幅值0.0314xsqrt(3x3+4x4)=0.157安培
三相交流ia, ib, ic幅值
ia幅值0.0314xsqrt(3x3+4x4)=0.157安培
ib幅值0.0314xsqrt(3x3+4x4)=0.157安培
ic幅值0.0314xsqrt(3x3+4x4)=0.157安培
三相交流ia, ib, ic相位
2. d/q/theta的物理意义
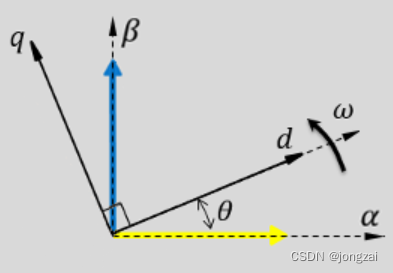
在d轴对齐方式下,theta就是alpha轴与d轴之间的夹角,它表示的是dq坐标系相对于alpha轴转过的角位移。而这个角位移就是转子转过的角位移。为什么dq0坐标系转过的角位移会与实际电机转子的角位移相同,因为dq0坐标系建立的规定就是转速omiga与转子角速度相同的旋转坐标系。
坐标系Σalpha-beta的建立规则如下图所示。
所以需要找到坐标系Σalpha-beta与实际位移之间的物理关系。
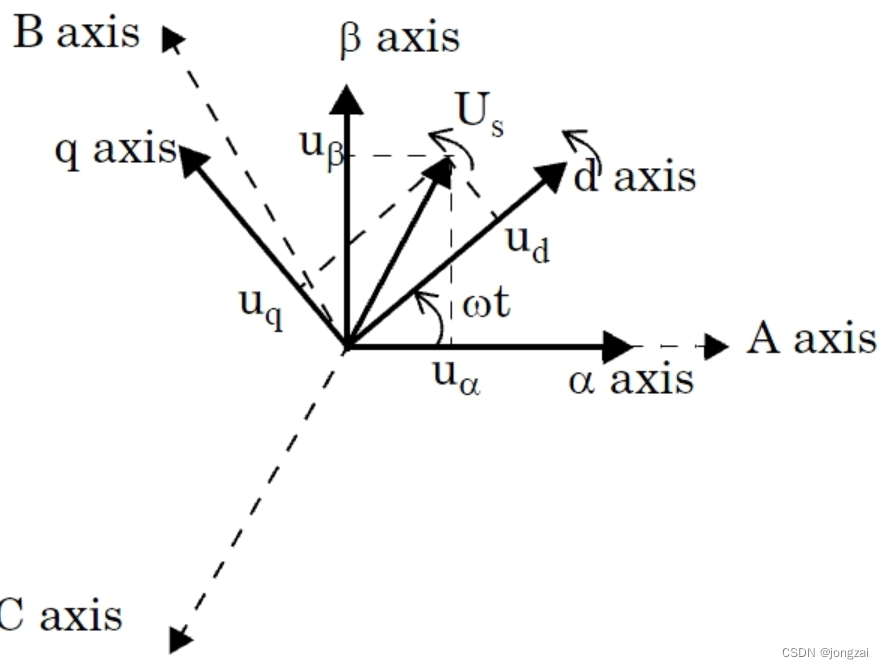
3. ABC自然坐标系
该坐标系已经在图2中画出,这里只有一点需要说明就是坐标系Σabc是非正交系(投影法),只是该坐标系是电气矢量空间的三维坐标系,转换为平面坐标系alpha-beta显然是有利于分析控制的,这就是clark变换的用途。
4.总结
以上坐标系均是建立在电气分析的矢量空间中,并不与真实的电机机械结构一一对应,但是电机的角速度与dq旋转坐标系的角速度是关联且相等的。
参考文献
https://zhuanlan.zhihu.com/p/172484981
https://zhuanlan.zhihu.com/p/293470912
https://zhuanlan.zhihu.com/p/415911014















 474
474











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











