







lsd简介
在早些版本的opencv中是有内置的LSD检测算法的,后来由于Licence原因,后面版本的opencv中就没有lsd了。
论文、源码、在线体验地址:IPOL Journal · Image Processing On Line
LSD是一种直线检测分割算法,它能在线性的时间内得出亚像素级精度的检测结果。该算法被设计成可以在任何数字图像上都无需参数调节。它可以自己控制误检的数量:平均而言,每张图有一个误检。
LSD是一种局部提取直线的算法,速度比Hough要快。
但是有局部算法的缺点:
1.对于直线相交情况,因为设置了每个点是否USED,因此每个点只能属于一条直线,若有相交必有至少一条直线被割裂为两条。又因为其基于梯度,直线交点梯度值往往又较小(不被检测为边缘点),因此很有可能相交的两条直线在交点处被割裂为四条线段。
2.由于局部检测算法自增长的特点,对于长线段被遮挡、局部模糊等原因经常割裂为多条直线。这些缺点在Hough变换中不存在。
算法步骤概括:
1.以 s=0.8的尺度对输入图像进行高斯下采样。
2.计算每一个点的梯度值以及梯度方向(level-line orientation)。
3.根据梯度值对所有点进行伪排序(pseudo-ordered),建立状态列表,所有点设置为UNUSED。
4.将梯度值小于ρ的点状态表中相应位置设置为USED。
5.取出列表中梯度最大(伪排列的首位)的点作为种子点(seed),状态列表中设为USED。
do:
a.以seed为起点,搜索周围UNUSED并且方向在阈值[ -t, t]范围内的点,状态改为USED。
b.生成包含所有满足点的矩形R。
c.判断同性点(aligned pt)密度是否满足阈值D,若不满足,截断(cut)R变为多个矩形框,直至满足。
d.计算NFA。
e.改变R使NFA的值更小直至NFA <= ε ,R加入输出列表。
// 带有尺度参数和区域输出的 LSD 接口函数
double * lsd_scale_region( int * n_out,double * img, int X, int Y, double scale,
int ** reg_img, int * reg_x, int * reg_y )
{
double sigma_scale = 0.6 ; // Sigma for Gaussian filter is computed as sigma = sigma_scale/scale.
double quant = 2.0 ; // Bound to the quantization error on the gradient norm.
double ang_th = 22.5 ; // Gradient angle tolerance in degrees.
double log_eps = 0.0 ; // Detection threshold: -log10(NFA) > log_eps
double density_th = 0.7 ; // Minimal density of region points in rectangle.
int n_bins = 1024 ; // Number of bins in pseudo-ordering of gradient modulus.
return LineSegmentDetection( n_out, img, X, Y, scale, sigma_scale, quant,
ang_th, log_eps, density_th, n_bins,
reg_img, reg_x, reg_y );
}
<p>// LSD 完整的接口函数
double * LineSegmentDetection( int * n_out,
double * img, int X, int Y,
double scale, double sigma_scale, double quant,
double ang_th, double log_eps, double density_th,
int n_bins,
int ** reg_img, int * reg_x, int * reg_y )
{
int ls_count = 0; /* line segments are numbered 1,2,3,... */</p><p>
// 角度阈值
prec = M_PI * ang_th / 180.0;
p = ang_th / 180.0; // contrario model中角度符合level-line角度阈值的概率
rho = quant / sin(prec); // 梯度阈值</p><p> // 对图像进行尺度变换
image = new_image_double_ptr( (unsigned int) X, (unsigned int) Y, img );
if( scale != 1.0 )
{
scaled_image = gaussian_sampler( image, scale, sigma_scale );
// 计算每个点的方向
angles = ll_angle( scaled_image, rho, &list_p, &mem_p, &modgrad, (unsigned int) n_bins );
free_image_double(scaled_image);
}
else
// 计算每个点的方向
angles = ll_angle( image, rho, &list_p, &mem_p, &modgrad, (unsigned int) n_bins );
xsize = angles->xsize;
ysize = angles->ysize;</p><p> /* Number of Tests - NT</p><p> improve rectangle step根据p的衰减看出运行11次,共(XY)^(5/2)种线段,得到Ntest</p><p> The theoretical number of tests is Np.(XY)^(5/2) where X and Y are number of columns and rows of the image.
Np corresponds to the number of angle precisions considered. As the procedure 'rect_improve' tests 5 times
to halve the angle precision, and 5 more times after improving other factors, 11 different precision values
are potentially tested. Thus, the number of tests is
11 * (X*Y)^(5/2)
whose logarithm value is
log10(11) + 5/2 * (log10(X) + log10(Y)). */
logNT = 5.0 * ( log10( (double) xsize ) + log10( (double) ysize ) ) / 2.0 + log10(11.0);
min_reg_size = (int) (-logNT/log10(p)); /* minimal number of points in region that can give a meaningful event */</p><p> // 搜索线段
for(; list_p != NULL; list_p = list_p->next )
{
if( used->data[ list_p->x + list_p->y * used->xsize ] == NOTUSED &&
angles->data[ list_p->x + list_p->y * angles->xsize ] != NOTDEF )
/* there is no risk of double comparison problems here
because we are only interested in the exact NOTDEF value */
{
// 找出位置相邻接且方向相近的点构成的区域
region_grow( list_p->x, list_p->y, angles, reg, ®_size, ®_angle, used, prec );</p><p> // 清除较小的区域
if( reg_size < min_reg_size ) continue;</p><p> // 构造矩形,近似该区域
region2rect(reg,reg_size,modgrad,reg_angle,prec,p,&rec);</p><p> // 检查矩形中点的密度,若小于阈值,则改进矩形表示。若仍旧不满足阈值条件,则清除该区域
if( !refine( reg, ®_size, modgrad, reg_angle,
prec, p, &rec, used, angles, density_th ) ) continue;</p><p> // 计算 NFA 值
log_nfa = rect_improve(&rec,angles,logNT,log_eps);
if( log_nfa <= log_eps ) continue;</p><p> // 找到一条新的线段
++ ls_count; // 线段数目 増一</p><p> // 补偿梯度计算时的误差
rec.x1 += 0.5; rec.y1 += 0.5;
rec.x2 += 0.5; rec.y2 += 0.5;</p><p> // 尺度变换
if( scale != 1.0 )
{
rec.x1 /= scale; rec.y1 /= scale;
rec.x2 /= scale; rec.y2 /= scale;
rec.width /= scale;
}</p><p> // 将找到的直线加入到输出变量中
add_7tuple( out, rec.x1, rec.y1, rec.x2, rec.y2,
rec.width, rec.p, log_nfa );</p><p> // 在 'region' 图像中标记出该直线
if( region != NULL )
for(i=0; i<reg_size; i++)
region->data[ reg[i].x + reg[i].y * region->xsize ] = ls_count;
}
}</p><p> // 返回结果
return return_value;
}</p>
1.尺度缩放:
按照原文,这一步可选择跳过(s =1.0)。算法的默认选择是s=0.8。目的是为了消除锯齿效应。然后用高斯下采样的方式对输入图像进行操作,其中σ =∑ /s。∑=0.6。
2.梯度和方向计算:
梯度计算中论文用到的是2*2的模板。主要是为了用contrario model的时候保证相邻点方向分布的独立性。
gx(x,y) = ( i(x + 1, y) + i(x + 1, y + 1) − i(x, y) − i(x, y + 1)) / 2
gy(x, y) =( i(x, y + 1) + i(x + 1, y + 1) − i(x, y) − i(x + 1, y)) / 2
规范化后的梯度:
g(x,y) = (gx^2 + gy2)0.5
梯度方向的计算:
ang(x,y) = arctan(gx(x, y) / (−gy(x, y))
这种方法计算的梯度其实是(x+0.5,y+0.5)处的,在最后的步骤会对这里的计算偏差进行补偿。
3.梯度伪排序:
梯度值越大,越是显著的边缘点,因此更适合作为种子点。但是对梯度值进行完全排序是一个时耗性很高的工作。因此简单的将梯度值划分为1024个等级(bins),这1024个等级涵盖了梯度由0~255的变化范围,这种排序是一个线性的时耗。种子点从梯度值最高的bin开始搜索,依次往下,直至所有点标记为USED。
小梯度值抑制:
小梯度值点往往出现在平滑区域,或者仅仅是噪声。不在关注的范围内,但是他们的存在往往会严重影响直线角度的计算。考虑到有角度承受范围[-t,t]。因此小梯度“脏点”的最大影响角度需要小于t。假设“脏点”的阈值为q。那么|bad ang|=q / sin(t)。这里,t被坐着设置为22.5度。因此在这里q=2。
4.直线(矩形)区域增长:
由种子点搜索角度满足并且状态为UNUSED的点(八邻域)形成的区域称为line-support region。邻域内在角度承受范围t内满足整个区域的方向角region-ang的点加入到这个区域。每次增加一个点,
reigon-ang会更新:
region-ang=arctan(∑(sin(pt(i))/ ∑(cos(pt(i))),i为region内所有的点。
直线(矩形)勾勒:
上一步后line-support region一系列相邻的离散点,需要将他们包含在一个矩形框内R,这个可以看做宽度为R的宽,长度为R的长的候选直线。R内,上一步所选择的点即为类内点(aligned pt),显然,矩形框内还很有可能包含很多上一步没有选择近line-support region的outline pt。R选择能包含line-support region的最小矩形,所有点的梯度规范化值平均计算重心。R长轴的方向设置为R的方向。
5.NFA的计算:
The validation step is based on the a contrario approachandthe Helmholtz principle proposed by Desolneux.
the Helmholtz principle:在完美噪声图像图像中不应该检测到目标。
contrario approach:一个不会检测到目标的噪声图像。对于本课题,contrario model是一个像素值为level-line angle的图像。其level-line angle随机分解为独立且服从平均分布于[0-2*PI]。
这里用NFA(Number of False Alarms)来评判observe img中某个候选Rec少于contrario model中相同位置Rec里aligned pt点的数量的概率,NFA越大,表明当前Rec与contrario model中相同位置越相似,相反的,当前rec越有可能是“真正的目标”。
其中:
NFA = N * Ph0[ k(r,I) >= k(r,i) ]
上式中,N为当前大小(mn)图像中直线(矩形框)的数量。在mn的图像中直线的起点和终点分别有mn种选择,所以一共有(mn)(mn)种起点和终点搭配。线段的宽度为[0,m*n 0.5]。因此在m*n大小的图像中有(m*n)2.5 种不同直线。
N=(m*n)^2.5
k(r,I) 为contrario model ,I 中 r 矩形里aligned pt的数量。
k(r,i) 为observe img,i 中 r 矩形里aligned pt的数量。
根据contrario model的建立规则,每个像素都服从值域为[0,2*PI]的二项分布。
设k(r,i)=k。
其中:
角度正负容忍误差为t,总容忍误差为2t。那么在contrario model中某个点为aligned pt的概率为 p=2t / 2Pi = t / PI。
那么,在 I 中的 r 矩形里,总像素个数为 n。I 中的 r 矩形里aligned pt个数k(r,I)大于等于k的话,可选择的值为k(r,i)、k(r,i)+1、k(r,i)…n。
概率为: ∑ p^i * (1-p)^(n-i) ,i=k,k+1,k+2……n。
因此:
NFA = (m*n)^2.5 * ∑ p^i * (1-p)^(n-i) ,i=k,k+1,k+2……n
如果NFA的值很大,认为当前事件出现在contrario model的概率很大,将其认为是背景中的一部分。相反的,认为目标是相对突出(rare)的,是一个合适的“直线”。
即:NFA <= ε
ε-meaningful rectangles :
E(ho)[ ∑NFA® <= ε ] <= ε , r∈ R。R为图像中所有直线的集合。E为期望运算。ho为contrario model。
根据论文,ε =1
类内点(aligned pt)密度计算
fig 1
如fig 1所示,因为t的存在且有正负号容忍范围,容易出现图中line-support region增长不合理,此时应将R截断为两个更小的R更为合适。若如图分割的区域包含的直线形成的角为钝角,本次操作只留下包含seed的一段,舍弃另一段。舍弃的点重置为UNUSED。
6.类内点密度:
d = k / n。k为类内点个数,n为R的length*width。若d > D。accepted。否则,需要将R截断。在这里设置D=0.7。文章认为这个数字既能保证同一个R中的类内点属性相近,也能保证R不会被过分的分割为小的矩形。
若没满足d > D 分割方法分为“缩小角度容忍阈值”与“缩小区域半径”的方法。
缩小角度容忍阈值:简单的将t值缩小,再次从当前R的seed开始搜寻。如果这一步仍为满足d > D,将逐步舍弃离seed较远的点,直至满足不等式未知。
类内点的计算将会解决曲线因为t的存在而误识别为直线的状况。
7.Rectangle Improvement:
如果当前的R仍旧不能满足NFA,以下的方法将对其进行改进。考虑到在有些情况下,删除line-support region中的一个点会减少R的 length-1个点(想象为对角线)。对不满足NFA的R,采取以下策略:
1.减小p=p/2
2.短边减少一行
3.长边减少一行
4.长边减少另一行
5.减小p=p/2 直至满足NFA或R过小被拒或p为原来的1/32。
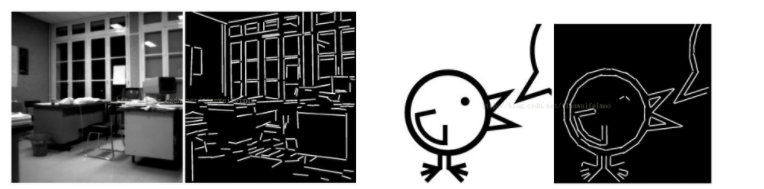
Results:
参考:
基于LSD的直线提取算法
- LSD :A Fast Line Segment Detector with a False Detection Control>. Rafael Grompone von Gioi.etc
- LSD: a Line Segment Detector>.Rafael Grompone von Gioi.etc















 753
753











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











