







ITK学习笔记(一)ITK的使用
第一个ITK程序
1、CMakeLists.txt
# This is the root ITK CMakeLists file.
cmake_minimum_required(VERSION 3.10)
# This project is designed to be built outside the Insight source tree.
project(ITK_demo)
# Find VTK
set(ITK_DIR D:/ProgramFiles/ITK-5.1.1/lib/cmake/ITK-5.1) # add wmz
find_package(ITK REQUIRED)
include_directories(${ITK_INCLUDE_DIRS})
message("ITK dir = ${ITK_INCLUDE_DIRS}")
message("ITK lib = ${ITK_LIBRARIES}")
include(${ITK_USE_FILE})
#aux_source_directory(src SRC_LIST)
set(SRC_LIST
./itk_demo.cpp)
add_executable(itk_demo ${SRC_LIST} )
target_link_libraries(itk_demo ${ITK_LIBRARIES})
关于 include(${ITK_USE_FILE}) 的说明可以在 UseITK.cmake 中找到:
# -------------
#
# This file is not part of the ITK API. It exists purely as an
# implementation detail. This CMake module may change from version to
# version without notice, or even be removed.
#
# We mean it.
#
# This file sets up include directories, link directories, IO settings and
# compiler settings for a project to use ITK. It should not be
# included directly, but rather through the ITK_USE_FILE setting
# obtained from ITKConfig.cmake.
2、 测试数据
测试数据下载路径:https://github.com/InsightSoftwareConsortium/ITK/tree/master/Examples/Data
其实编译ITK时的目录下就有需要的测试数据,比如我的ITK-5.1.1目录下。
\ITK-5.1.1\Examples\Data
3、代码
作为第一个示例程序本来应该写一个很简单的像HelloWorld的程序,但是一些比较简单的官网的程序 要么依赖VTK,要么版本高于ITK5.1.1.
所以就找了一个比较长的程序,是一个配准的程序。
代码来自:https://github.com/InsightSoftwareConsortium/ITK/blob/master/Examples/RegistrationITKv4/MultiResImageRegistration1.cxx
我找了一个其他人做过的中文注释版
#include "itkImageRegistrationMethodv4.h"
#include "itkTranslationTransform.h"
#include "itkMeanSquaresImageToImageMetricv4.h"
#include "itkRegularStepGradientDescentOptimizerv4.h"
#include "itkImageFileReader.h"
#include "itkImageFileWriter.h"
#include "itkPNGImageIOFactory.h"
#include "itkResampleImageFilter.h"
#include "itkCastImageFilter.h"
#include "itkRescaleIntensityImageFilter.h"
#include "itkSubtractImageFilter.h"
/*****************************************************************************************************************
* 本例子是一个图像配准的Demo
* 0、创建了一个Command对象,用于监控配准的过程,被后面的对象调用
* 1、首先要定义像素的维度以及像素类型:进进而链接参考图像以及浮动图像
* 2、定义框架的基本组件:
* 确定变换种类:TransformType:二维变换
* 确定优化方法:OptimizerType:梯度下降
* 确定相似度度量:MetricType:链接两个图像:浮动图像以及参考图像
* 3、创建图像组件,并且通过创建上述框架,进而进行设置(链接)
* 4、设置插值方法:LinearInterpolateImageFunction并且链接在一起
* 5、6:通过ImageFileReader方法进行读取,链接到 registration并更新
* 7、针对前面的TransformType进行实例化:平移变换用于配准SetInitialTransformParameters:用于设置初始值
* 8、针对优化方法的设置:OptimizerType:前面在创建的时候已经设置了其梯度下降方法,此步骤用于对其微调:初始步长,收敛公差,最大迭代次数
* 9、通过RegistrationParameterScalesFromPhysicalShift:将每一个配准要素链接到配准方法中执行,
* 10、实例化Common对象,监控配准过程的执行,触发配准过程--迭代
* 11、通过update函数触发配准的执行
* 12、配准结果定义空间变换的参数序列:其结果由GetLastTransformParameters( )获得并且输出
* X、Y的变换:TranslationAlongX;TranslationAlongY
* 迭代次数:numberOfIterations
* 最后的结果:bestValue
* 通过CompositeTransform:AddTransform将转换添加到堆栈的背面,并且拥有可优化的参数。
* 也就是说:添加堆栈,副本??
* 13、14、15、16、ResampleFilterType方法:
* 用变换参数将两幅图像进行叠加比较,并设置重采样滤波器:输入两幅图像
* 输出的是一个变换
* 对滤波器进行相关参数的设置:大小、原点、间距、位置
* 并通过CastFilterType:setInput:weiter进行相关的输出
* 此时:这个图象就是配准结束后的图像
* 17、通过itk::SubtractImageFilter对两幅图像进行比较:
* fixedImageReader;resampler
* 18、对图像进行处理 itk::RescaleIntensityImageFilter:调节一下亮度;并进行输出
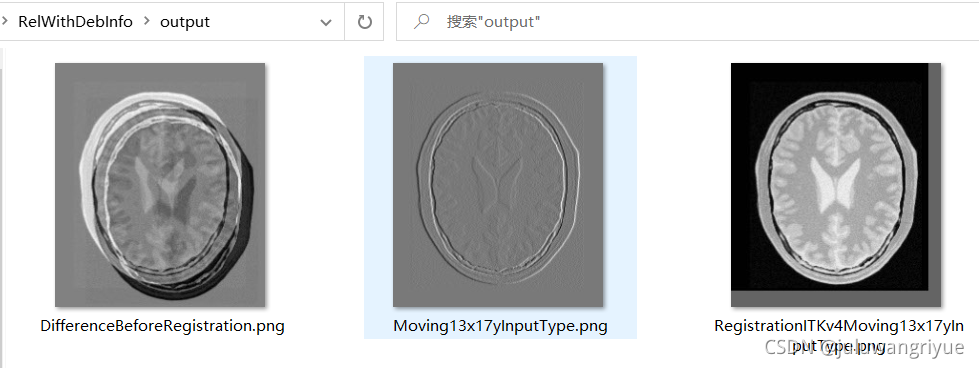
* 19、一致性转发计算参考图像与正在移动图像之间的不同,输出图片5
******************************************************************************************************************/
/*CommandIterationUpdate 类:
继承Command,监视配准过程的执行。每调用一次,输出相应参数
object类指向事件的观察者
Execute方法,类似cellbake,回转
observer方法:
*/
class CommandIterationUpdate : public itk::Command
{
public:
typedef CommandIterationUpdate Self;
typedef itk::Command Superclass;
typedef itk::SmartPointer<Self> Pointer;
itkNewMacro(Self);//宏,包装了所有的new()所有代码
protected:
CommandIterationUpdate() {};
public:
typedef itk::RegularStepGradientDescentOptimizerv4<double> OptimizerType;
typedef const OptimizerType* OptimizerPointer;
void Execute(itk::Object* caller, const itk::EventObject& event) ITK_OVERRIDE
{
Execute((const itk::Object*)caller, event);
}
//Object表示激活事件的对象,event表示被激活的事件
void Execute(const itk::Object* object, const itk::EventObject& event) ITK_OVERRIDE
{
OptimizerPointer optimizer = static_cast<OptimizerPointer>(object);
//checkEvent表示是否观察的对象
if (!itk::IterationEvent().CheckEvent(&event))
{
return;
}
std::cout << optimizer->GetCurrentIteration() << " = ";
std::cout << optimizer->GetValue() << " : ";
std::cout << optimizer->GetCurrentPosition() << std::endl;
}
};
int main()
{
//1、定义图像的维度以及像素执行
const unsigned int Dimension = 2;//定义维度
typedef float PixelType;//图像像素类型
typedef itk::Image< PixelType, Dimension > FixedImageType;//输入数据的类型:参考图像
typedef itk::Image< PixelType, Dimension > MovingImageType;//浮动图像
//2、定义配准框架的基本组件:变换、优化、测度配准组件
//用于2D图像的一个刚性配准,变换的唯一参数是:空间坐标类型
//配准
typedef itk::TranslationTransform< double, Dimension > TransformType;//把参考图像的空间映射到待配准图像的映射
//优化
typedef itk::RegularStepGradientDescentOptimizerv4<double> OptimizerType;//优化算法:牛顿梯度下降法
//度量
typedef itk::MeanSquaresImageToImageMetricv4<//相似度测量:均方根
FixedImageType,
MovingImageType > MetricType;
//3、该组件用用于连接其他组件
typedef itk::ImageRegistrationMethodv4<
FixedImageType,
MovingImageType,
TransformType > RegistrationType;
MetricType::Pointer metric = MetricType::New();
OptimizerType::Pointer optimizer = OptimizerType::New();
RegistrationType::Pointer registration = RegistrationType::New();
//连接组件:变换、优化组件
registration->SetMetric(metric);
registration->SetOptimizer(optimizer);
//4、插值方法
typedef itk::LinearInterpolateImageFunction<//选择校对机类型,校对机会对配准图像在非网格位置的程度进行评估
FixedImageType,
double > FixedLinearInterpolatorType;
typedef itk::LinearInterpolateImageFunction<
MovingImageType,
double > MovingLinearInterpolatorType;
FixedLinearInterpolatorType::Pointer fixedInterpolator =//每一个配准要素需要其new创建
FixedLinearInterpolatorType::New();
MovingLinearInterpolatorType::Pointer movingInterpolator =
MovingLinearInterpolatorType::New();
metric->SetFixedInterpolator(fixedInterpolator);
metric->SetMovingInterpolator(movingInterpolator);
//5、设置待配准图像以及变换区域
typedef itk::ImageFileReader< FixedImageType > FixedImageReaderType;
typedef itk::ImageFileReader< MovingImageType > MovingImageReaderType;
FixedImageReaderType::Pointer fixedImageReader = FixedImageReaderType::New();
MovingImageReaderType::Pointer movingImageReader = MovingImageReaderType::New();
//6、读图像!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
itk::PNGImageIOFactory::RegisterOneFactory();
fixedImageReader->SetFileName("E:\\documents\\vs2019\\itk_demo\\build\\RelWithDebInfo\\data\\BrainProtonDensitySliceBorder20.png");//输入图像文件
movingImageReader->SetFileName("E:\\documents\\vs2019\\itk_demo\\build\\RelWithDebInfo\\data\\BrainProtonDensitySliceShifted13x17y.png");
//因为图像是从文件读取的,所以下面方法是用于获取图像数据的
//需要 itk::ImageRegistrationMethod 从 file readers 的输出获取输入
registration->SetFixedImage(fixedImageReader->GetOutput());
registration->SetMovingImage(movingImageReader->GetOutput());
//更新reader,确保其有效
// fixedImageReader->Update();
// movingImageReader->Update();
//7、平移变换用于配准
TransformType::Pointer movingInitialTransform = TransformType::New();
TransformType::ParametersType initialParameters(
movingInitialTransform->GetNumberOfParameters());
initialParameters[0] = 0.0; // Initial offset in mm along X
initialParameters[1] = 0.0; // Initial offset in mm along Y
movingInitialTransform->SetParameters(initialParameters);
registration->SetMovingInitialTransform(movingInitialTransform);
//8、准备执行配准方法:对优化器参数进行微调
TransformType::Pointer identityTransform = TransformType::New();
identityTransform->SetIdentity();
registration->SetFixedInitialTransform(identityTransform);
//初始振幅的长度用SetMaximumStepLength( ) 定义
//建立迭代的次数需要谨慎。最大数用SetNumberOfIterations()定义:
optimizer->SetLearningRate(4);
optimizer->SetMinimumStepLength(0.001);//优化器的收敛公差
optimizer->SetRelaxationFactor(0.5);
//9、将每一个配准要素连接到配准方法执行中
bool useEstimator = false;
//useEstimator = atoi(argv[6]) != 0;
if (useEstimator)
{
typedef itk::RegistrationParameterScalesFromPhysicalShift<MetricType> ScalesEstimatorType;
ScalesEstimatorType::Pointer scalesEstimator = ScalesEstimatorType::New();
scalesEstimator->SetMetric(metric);
scalesEstimator->SetTransformForward(true);
optimizer->SetScalesEstimator(scalesEstimator);
optimizer->SetDoEstimateLearningRateOnce(true);
}
optimizer->SetNumberOfIterations(200);//最大迭代次数
//10、实例化commend对象,监视配准过程的执行,并处触发配准过程
CommandIterationUpdate::Pointer observer = CommandIterationUpdate::New();
optimizer->AddObserver(itk::IterationEvent(), observer);
const unsigned int numberOfLevels = 1;
RegistrationType::ShrinkFactorsArrayType shrinkFactorsPerLevel;
shrinkFactorsPerLevel.SetSize(1);
shrinkFactorsPerLevel[0] = 1;
RegistrationType::SmoothingSigmasArrayType smoothingSigmasPerLevel;
smoothingSigmasPerLevel.SetSize(1);
smoothingSigmasPerLevel[0] = 0;
registration->SetNumberOfLevels(numberOfLevels);
registration->SetSmoothingSigmasPerLevel(smoothingSigmasPerLevel);
registration->SetShrinkFactorsPerLevel(shrinkFactorsPerLevel);
//11、通过调用Update函数触发配准执行
try
{
registration->Update();
std::cout << "Optimizer stop condition: "
<< registration->GetOptimizer()->GetStopConditionDescription()
<< std::endl;
}
catch (itk::ExceptionObject& err)
{
std::cerr << "ExceptionObject caught !" << std::endl;
std::cerr << err << std::endl;
return EXIT_FAILURE;
}
//12、配准结果是一系列定义空间变换的参数序列,结果由get获得
TransformType::ConstPointer transform = registration->GetTransform();
TransformType::ParametersType finalParameters = transform->GetParameters();
const double TranslationAlongX = finalParameters[0];//队列中每个元素对应着沿着一个空间维度的平移
const double TranslationAlongY = finalParameters[1];
//优化器能够询问抵达收敛的迭代的实际次数并通过GetCurrentIteration()返回出来
const unsigned int numberOfIterations = optimizer->GetCurrentIteration();//迭代次数
//最终参数集合的图像量规值通过优化器的GetValue();
const double bestValue = optimizer->GetValue();//最优化的度量
//将上述输出
std::cout << "Result = " << std::endl;
std::cout << " Translation X = " << TranslationAlongX << std::endl;//输出移动X的值
std::cout << " Translation Y = " << TranslationAlongY << std::endl;//输出移动Y的值
std::cout << " Iterations = " << numberOfIterations << std::endl;//输出迭代次数
std::cout << " Metric value = " << bestValue << std::endl;//输出优化的度量
typedef itk::CompositeTransform<
double,
Dimension > CompositeTransformType;
CompositeTransformType::Pointer outputCompositeTransform =
CompositeTransformType::New();
outputCompositeTransform->AddTransform(movingInitialTransform);
outputCompositeTransform->AddTransform(
registration->GetModifiableTransform());
//13、用变换结果将待配准图映射到参考图像中
typedef itk::ResampleImageFilter<
MovingImageType,
FixedImageType > ResampleFilterType;
//14、创建一个重采样滤波器,输入待配准图像
ResampleFilterType::Pointer resampler = ResampleFilterType::New();
resampler->SetInput(movingImageReader->GetOutput());
//配准函数生成的变换也作为重采样滤波器的输入被传递
resampler->SetTransform(outputCompositeTransform);
//15、ResampleImageFilter要求指定额外的参数,特别是输出图像的间 距、原点和大小
FixedImageType::Pointer fixedImage = fixedImageReader->GetOutput();
resampler->SetSize(fixedImage->GetLargestPossibleRegion().GetSize());//尺寸
resampler->SetOutputOrigin(fixedImage->GetOrigin());//原点
resampler->SetOutputSpacing(fixedImage->GetSpacing());//间距
resampler->SetOutputDirection(fixedImage->GetDirection());//位置
resampler->SetDefaultPixelValue(100);
//16、滤波器的输出被传递给一个在文件中存储图像的writer
typedef unsigned char OutputPixelType;
typedef itk::Image< OutputPixelType, Dimension > OutputImageType;
typedef itk::CastImageFilter<//转化重采样的像素类型到最终的writer类型
FixedImageType,
OutputImageType > CastFilterType;
typedef itk::ImageFileWriter< OutputImageType > WriterType;
//调用new函数创建新的滤波器
WriterType::Pointer writer = WriterType::New();
CastFilterType::Pointer caster = CastFilterType::New();
writer->SetFileName("E:\\documents\\vs2019\\itk_demo\\build\\RelWithDebInfo\\output\\RegistrationITKv4Moving13x17yInputType.png");//写到文件夹位置
caster->SetInput(resampler->GetOutput());
writer->SetInput(caster->GetOutput());
writer->Update();//触发更新
//17、参照图像和被变换的待配准图像很容易用itk::SubtractImageFilter比较
//pixel-wise滤波器 计算两幅输入的同源像素的不同:
typedef itk::SubtractImageFilter<
FixedImageType,
FixedImageType,
FixedImageType > DifferenceFilterType;
DifferenceFilterType::Pointer difference = DifferenceFilterType::New();
difference->SetInput1(fixedImageReader->GetOutput());//不同
difference->SetInput2(resampler->GetOutput());
//18、两幅图像的不同也许比较暗,我们用下面方法对其进行调节亮度,使之更加的明显
typedef itk::RescaleIntensityImageFilter<
FixedImageType,
OutputImageType > RescalerType;
RescalerType::Pointer intensityRescaler = RescalerType::New();
intensityRescaler->SetInput(difference->GetOutput());
intensityRescaler->SetOutputMinimum(0);
intensityRescaler->SetOutputMaximum(255);
resampler->SetDefaultPixelValue(1);
//输出到另外一个位置(调亮)
WriterType::Pointer writer2 = WriterType::New();
writer2->SetInput(intensityRescaler->GetOutput());
writer2->SetFileName("E:\\documents\\vs2019\\itk_demo\\build\\RelWithDebInfo\\output\\Moving13x17yInputType.png");
writer2->Update();
//设置了一致性转换,计算参考图像的不同
resampler->SetTransform(identityTransform);
writer2->SetFileName("E:\\documents\\vs2019\\itk_demo\\build\\RelWithDebInfo\\output\\DifferenceBeforeRegistration.png");
writer2->Update();
return EXIT_SUCCESS;
}
4、结果
输入图像
输出图像


















 213
213

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











