







Altium Designer二次开发就在该软件原有的基础上,自己写代码给它添加新功能,如:一键生成Gerber,计算铺铜面积,PCB走线的寄生参数和延时等等。
Altium Designer二次开发有两种方式,一种是基于Altium Designer SDK的C#、C++开发;另一种是Delphi Script的脚本开发。两者区别在于,用C#、C++开发的需要特定的Altium Designer版本,而且编译之后,会变成软件的一部分;而用Delphi开发,则需要在Altium Designer上运行一下脚本,才能使用脚本上的功能。
使用C#、C++开发的,可以参考《Protel二次开发从入门到精通》,这是翻译官方的文档,而且比较古老。
虽然Altium Designer还支持其它脚本,但是Altium Designer是使用Delphi开发的,所以对Delphi支持最好(例子最多),所以这里只介绍Delphi脚本开发。
不熟悉Delphi的,可以参考《delphi经典编程入门》、《Delphi常用关键字用法详解》。这里不需要掌握太复杂的语法,只要会基本的赋值、变量、条件控制即可。
Delphi SDK Reference,这是Delphi的参考手册,把API分成了六大类。
官方还提供了一些例子在github上,但是一般很难下载(包太大了),这里可以从gitee下载。

也可以自己在github上搜索一些delphi脚本。

另外,官方还提供了Scripting Examples Reference for Altium Designer,也是能下载一些例子的。
好了,有了以上的准备工作,就可以在Altium Designer上写脚本了。
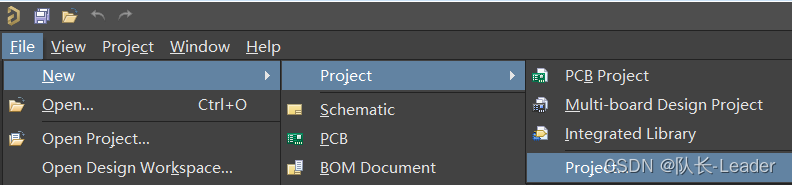
1、新建脚本工程。

2、给工程添加脚本文件。

这里支持三种文件,Script Unit:纯脚本文件;Script Form带图形界面的脚本文件;Script Data Module数据模型文件。
建议使用Script Form文件,因为既可以写脚本,也可以做图形界面。
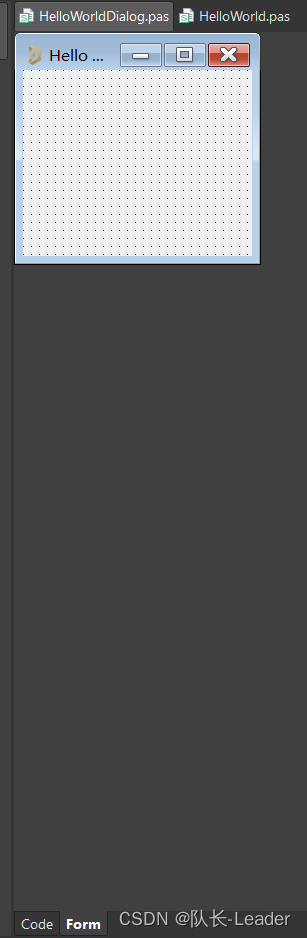
3、开发环境介绍。
Script Form和Script Unit的文件名后缀都一样,但是其功能不一样,Form在左下角出现两个选项卡,Code就是脚本,Form就是图形界面。而Script Unit是没有这两个选项卡的。

切换到Form,可以编辑图形界面。
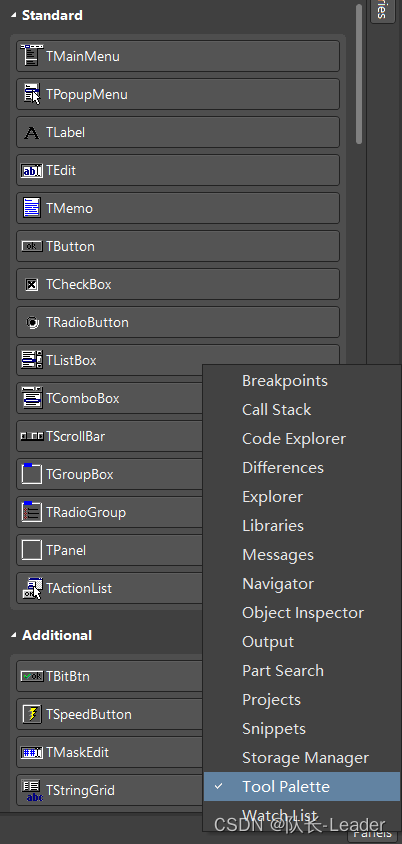
在右下角Panels,打开Tool Palette,可以看到一些控件,拖动控件到Form中,即可使用。
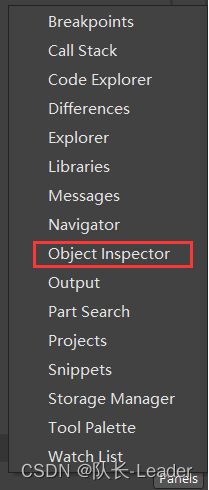
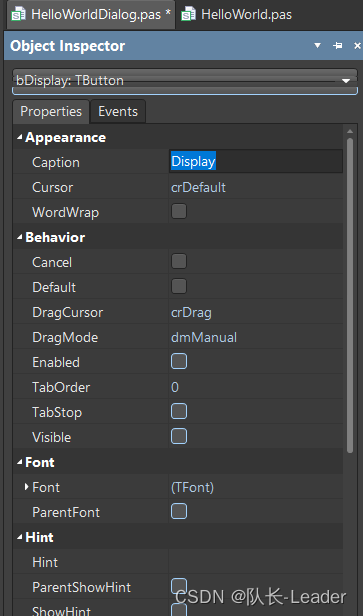
在右下角打开Object Inspector,选择控件,就会显示该控件的一些设置参数。
还有代码导航,可能没什么用。

4、快捷运行脚本。
每次修改了脚本,都要按File->Run Script,再选中自己的脚本才能运行,这效率太低了。
进入Customize。

在Toolbars中添加新的工具栏,并重命名为ScriptRun。

确定后,会发现多了一行工具栏,不过是空白的。

再进入刚才的Customize,在Commands中,选择[Scripts],把你要的脚本拖到刚才新添加的工具栏中。
 完成后,会多一个按钮。
完成后,会多一个按钮。
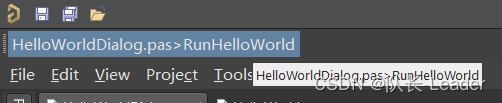
点击它,就可以运行该脚本了。
发现在原理图或PCB中,并没有显示该工具栏,可以使用刚才的方法,给原理图或PCB也添加一个脚本快捷按钮。

Altium Designer也自带代码提示功能。

如果要出word之类的功能,建议使用其它框架,如:Qt、C#等。这样做其它软件的二次开发,可以重复使用这套代码。
在官方的脚本中,会常常使用ResetParameters、AddStringParameter、RunProcess。

可以参考《System API Server Processes》,其中这些命令所使用的字符串,在Altium Designer安装目录下的INS文件中有参考。
其中,AddStringParameter的设置,需要按住Ctrl再点击任意一个菜单栏,会出现一个对话框显示设置的参数。

显示的这个处理和参数,就是AddStringParameter和RunProcess的参数。

也可以使用Client.SendMessage来实现。

但是这种方法要根据当前打开的文件来执行脚本,因为不同文件的功能可能不太一样。















 4053
4053











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









