






路径规划算法仿真 A星算法
传统A*(Astar)算法+改进后的A*算法 Matlab代码 可以固定栅格地图与起点终点 可以进行定量比较
改进:
①提升搜索效率(引入权重系数)
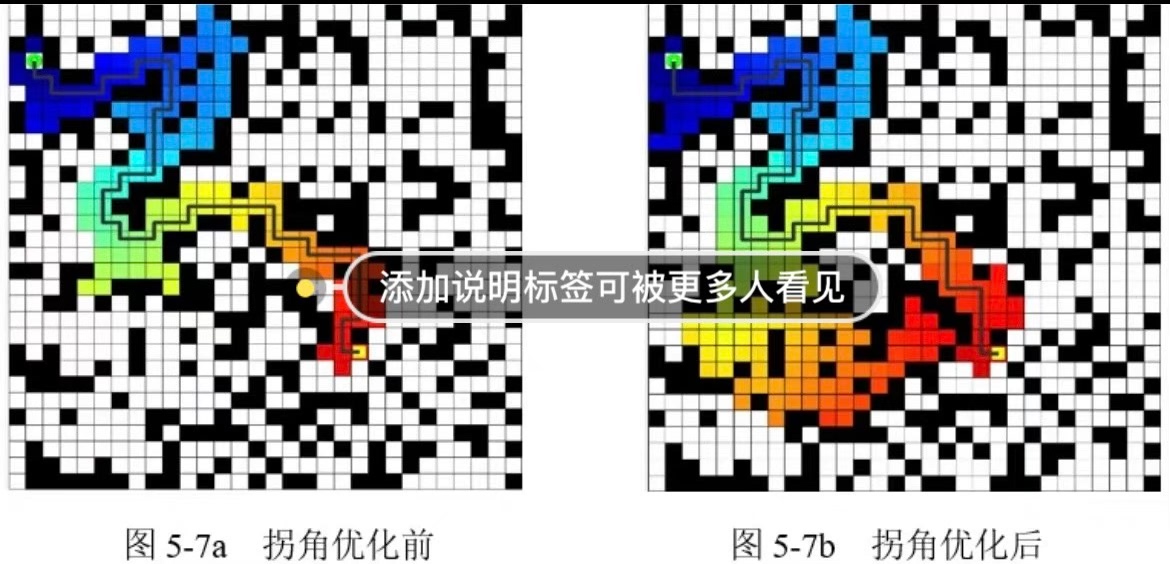
②冗余拐角优化(可显示拐角优化次数)
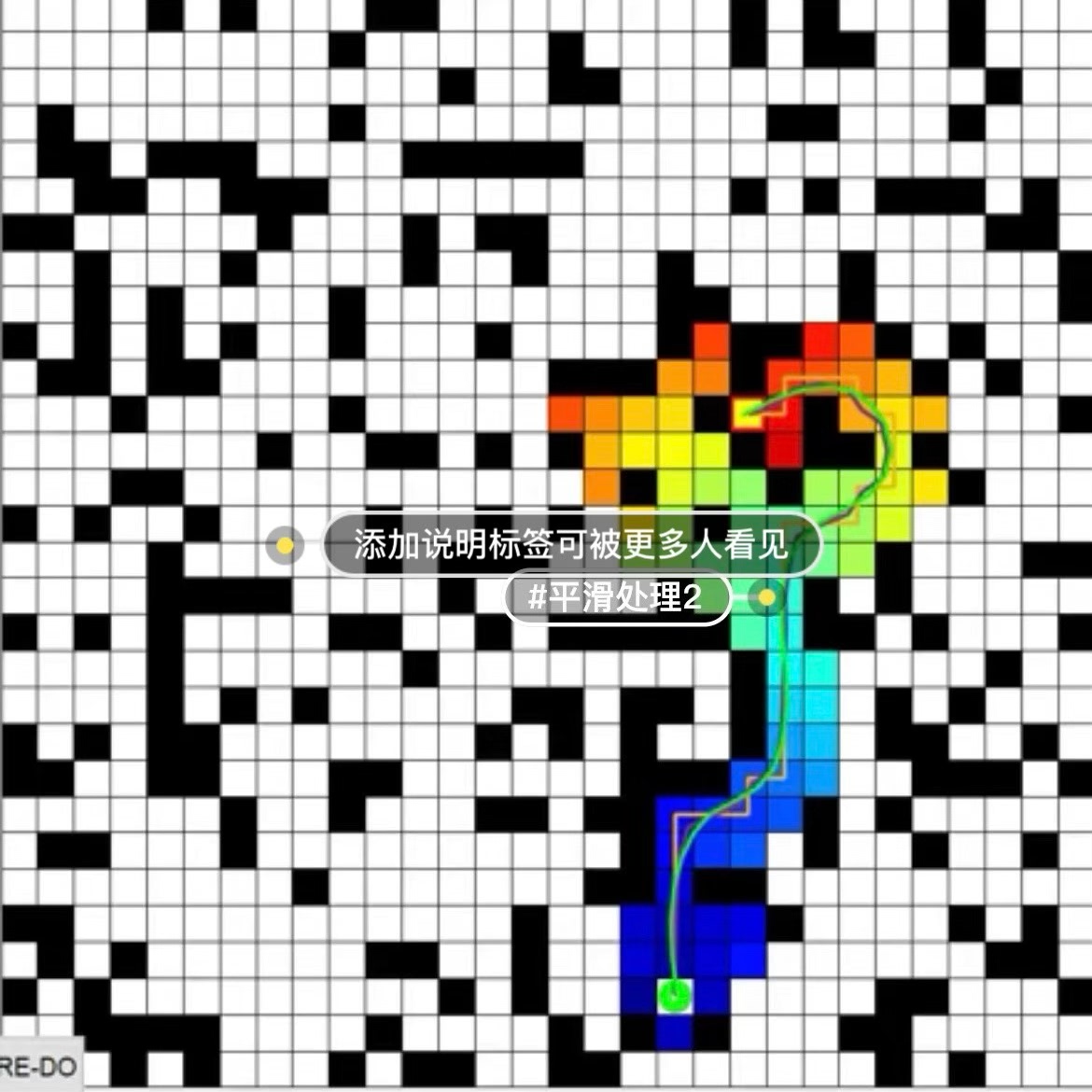
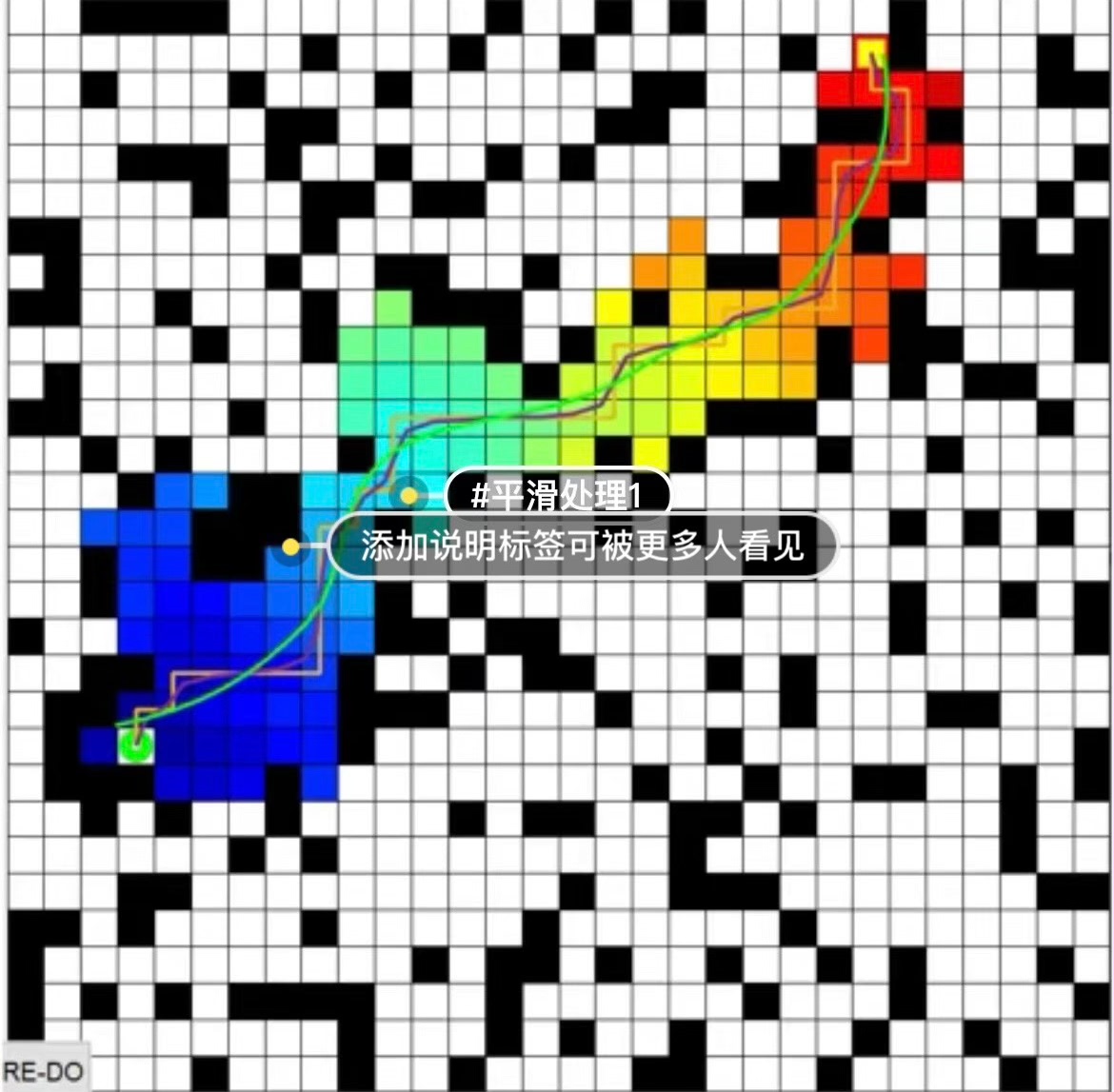
③路径平滑处理(引入梯度下降算法配合S-G滤波器)
代码含注释!
YID:6666721777190417
小连的路径规划小店

路径规划算法是计算机科学中的一个重要研究领域,其目标是通过算法找到一条最优路径,以使得机器人、无人驾驶车辆或其他智能设备能够从起点到达目标位置。在路径规划算法中,A*算法是一种常用且经典的算法。
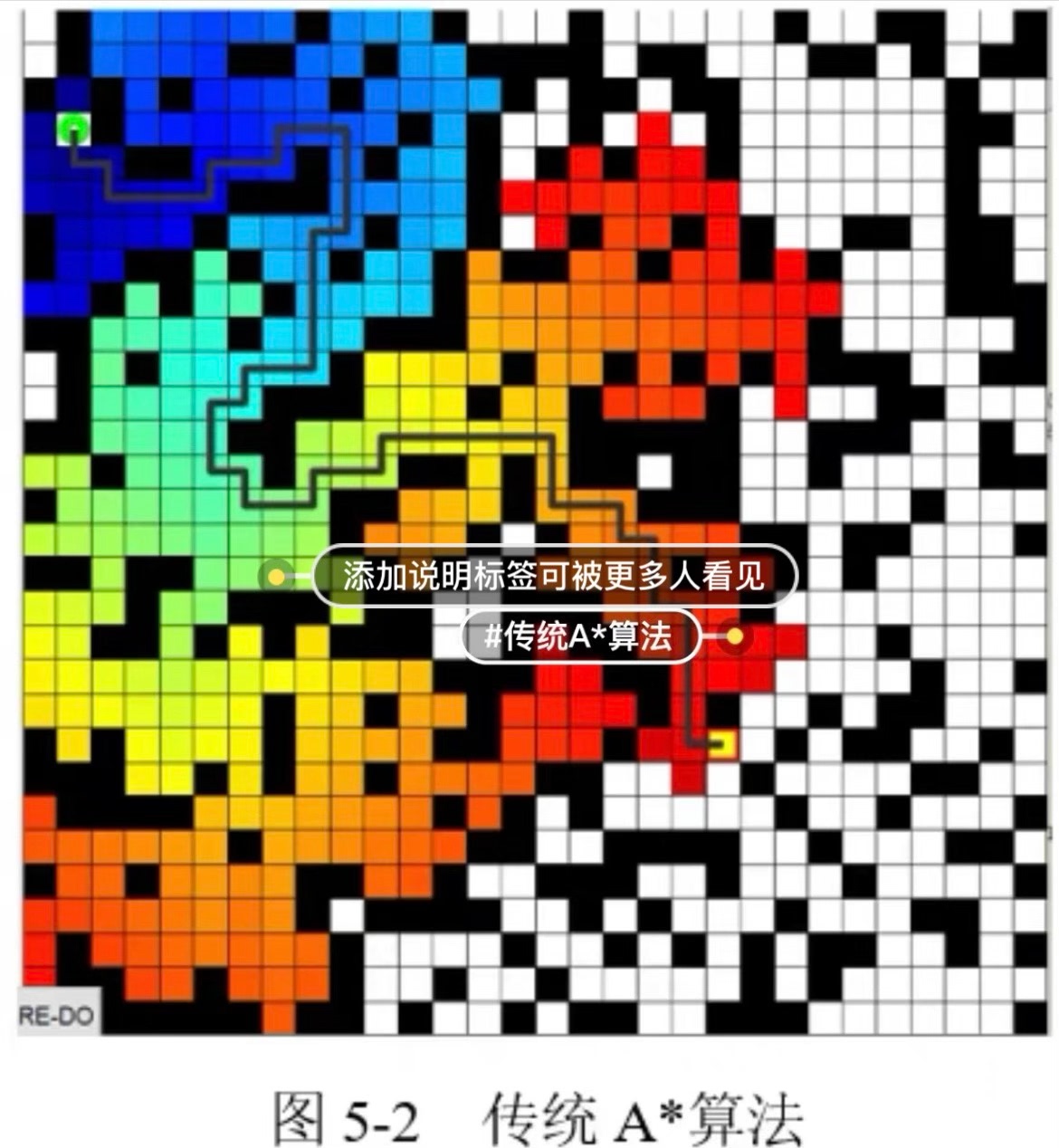
传统的A算法通过在搜索过程中根据启发函数估计目标位置距离来选择下一个最优节点,从而在搜索空间中进行目标寻找。然而,传统的A算法也存在一些问题,比如搜索效率低、路径无法光滑等。
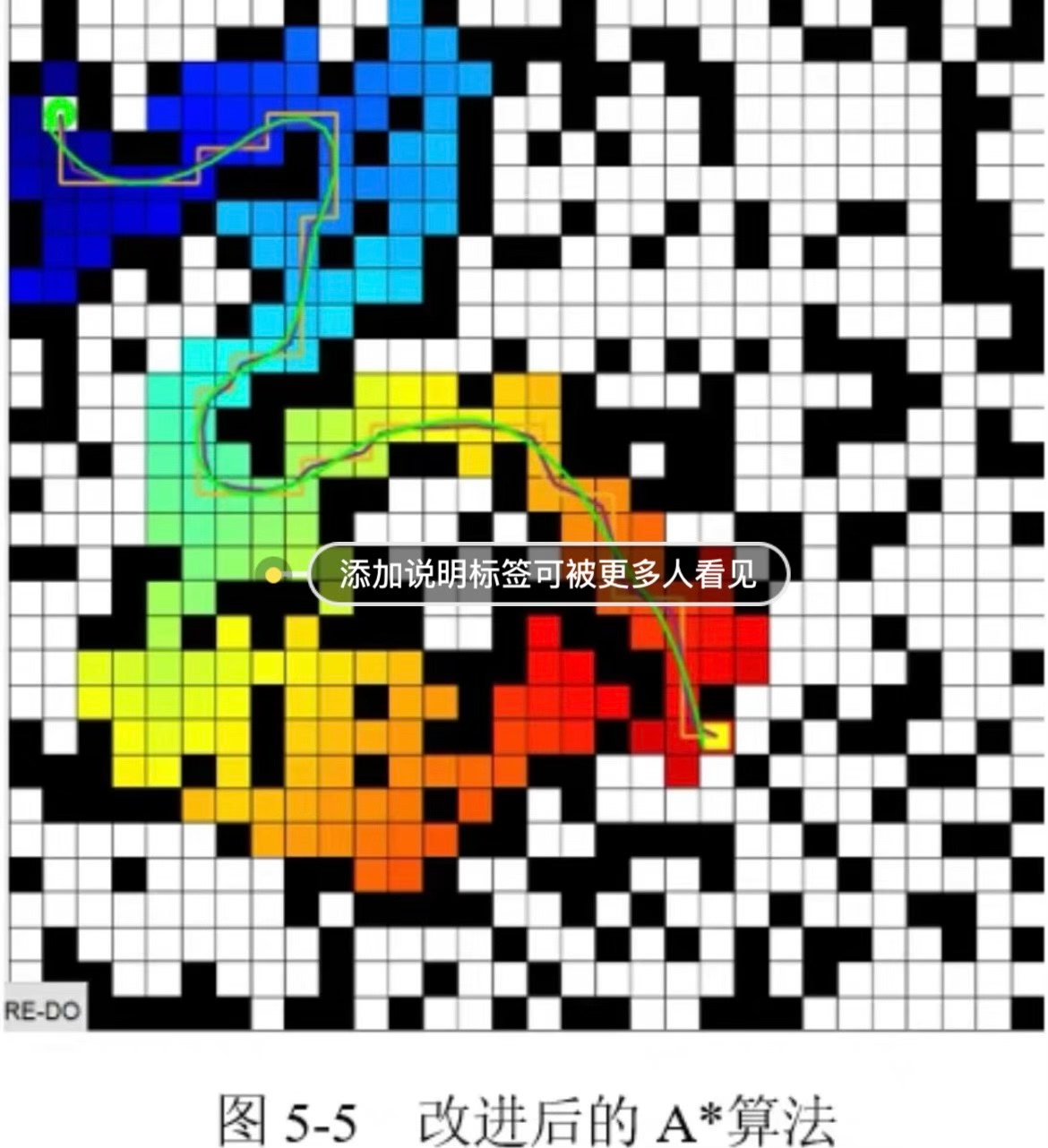
为了解决这些问题,我们对传统的A*算法进行了改进。首先,我们引入了权重系数来提升搜索效率。通过调整权重系数,我们可以在搜索过程中更加注重启发函数估计值和已经搜索过的节点的代价值,从而更快地找到最优路径。
其次,我们优化了冗余拐角问题。传统A*算法在搜索过程中会生成一些冗余的拐角,这些拐角并不会对路径的最优性有影响,却会增加路径的复杂度。我们通过引入拐角优化次数的计数器来减少拐角数量,并且可以在结果中显示优化次数,从而使得路径更加简洁和可读。
最后,我们对路径进行了平滑处理。我们引入了梯度下降算法,并结合S-G滤波器对路径进行平滑处理。这样可以使得路径更加光滑,减少了路径中的抖动,提升了路径的可行性。
以上改进的A*算法在Matlab环境下实现,并且附有详细的注释。我们提供了固定栅格地图和起点终点的设置,以便进行定量比较。通过利用这些代码,用户可以根据自己的需求进行路径规划,并进行性能对比。
总结来说,我们在传统的A*算法基础上进行了改进,提升了搜索效率,优化了冗余拐角问题,并对路径进行了平滑处理。这些改进使得我们的算法在寻找最优路径方面更加高效和准确。通过使用我们提供的Matlab代码,用户可以方便地进行路径规划仿真,并进行定量比较。该代码注释详细,并且可以让用户根据自己的需求进行参数调整和优化探索。
综上所述,我们的改进A*算法在路径规划中具有重要的应用价值,在机器人、自动驾驶、无人机等领域都有广泛的应用前景。通过我们提供的代码,用户可以更加方便地进行路径规划算法的研究和实践。我们相信,通过不断的优化和改进,路径规划算法将在未来的智能化领域发挥更加重要的作用。
相关的代码,程序地址如下:http://lanzoup.cn/721777190417.html
















 1064
1064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









