







之前已经实现了人工势场法避障的python仿真,人工势场法适用于局部避障,不依赖全局障碍物信息,根据实时检测到的障碍物即可进行避障。但其不能确保得到的路径最优,且存在局部极小值等问题。如果在已知部分障碍物信息的情况下,进行全局的路径规划,以局部避障方法作为辅助,可以得到更好的效果。
经过算法调研,了解到RRT方法(快速扩展随机树)和PRM方法(概率路线图方法)可以实现全局障碍物信息下的路径规划。PRM方法为,在地图中进行点采样,通过采样点获取可行路径;RRT方法为,从起始点开始进行节点扩展,每次有一定概率向目标点或一个随机点扩展,最终生成一棵包含可行路径的树。可通过A*等算法在当前采样点中寻找最优路径。
算法原理比较简单,接下来说明算法实现步骤,详细的代码见https://github.com/Kun-k/airsim_python/blob/main/code_python/python_avoid_RRT.py。
1.初始化地图
取一个二维数组作为输入地图,0表示该点为障碍物,1表示该点为可行点。读取一张图片并二值化,即可得到一个这样的数组。
# 读取地图图像并二值化
img = cv2.imread('6.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
retval, mymap = cv2.threshold(gray, 0, 255, cv2.THRESH_OTSU)
mymap = cv2.dilate(mymap, None, iterations=1).T
mymap = cv2.erode(mymap, None, iterations=4) / 255
为了便于记录和去重,生成一个与mymap相同尺寸的数组,用于储存各个位置的树节点。
tree_map = [] # 记录不同位置产生的节点,用于生成树时去重,0表示障碍物,None表示未访问,否则为已访问
for i in range(mapsize[0]):
tree_map.append([])
for j in range(mapsize[1]):
if mymap[i][j] == 0:
tree_map[i].append(0)
else:
tree_map[i].append(None)
2.设置航路点和参数
取下图所示的地图,分辨率为600x750,出发航路点为左下的[0,0]点,目标航路点为右上的[380,700]航路点。
可设置的参数包括:
- 随机采样概率
p_sample,在p_sample的概率下选择一个随机点作为采样点,否则以目标点作为采样点; - 最大迭代次数
maxlimit,若超出该迭代次数后仍未查找到路径,则认为查找失败,退出; - 步长
step,即每次向采样点移动的距离; - 误差
epsilon,与目标点的距离小于该值时认为查找到路径; - 安全距离
Q_save,选择航路点时,与障碍物的距离需大于安全距离。
3.点采样
在p_sample的概率下选择一个随机点作为采样点,否则以目标点作为采样点,
# 获取采样点
sample = [0, 0]
while tree_map[sample[0]][sample[1]] is not None:
if np.random.rand() < p_sample:
sample = np.array([np.random.randint(0, mapsize[0]),
np.random.randint(0, mapsize[1])])
else:
sample = aim
4.树的生长
获取采样点后,在已搜索的点中,选择距离采样点最近的点作为当前的出发节点p_curr,
# 在已搜索的点中,寻找距离采样点最近的点p_curr
min_dis = float('inf')
p_curr = start
for p_tmp in p_record:
dis = distance(p_tmp, sample)
if dis < min_dis:
p_curr = p_tmp
min_dis = dis
接下来由p_curr出发向采样点生长,生长的步长为step,得到点p_next
direction = (sample - p_curr) / np.linalg.norm((sample - p_curr))
p_next = p_curr + direction * step
需判断点p_next是否可行,这里进行三个限制
-
p_next位置无障碍物if 0 <= p_next[0] < mapsize[0] and 0 <= p_next[1] < mapsize[1] \ and tree_map[int(p_next[0])][int(p_next[1])] is None: # 是否为非障碍物点 flag = True # True表示该点可行 -
p_next周围安全距离的范围内无障碍物for dir in dir_save: # 判断点是否为安全点 p_search = p_next + dir if not (0 <= p_search[0] < mapsize[0] and 0 <= p_search[1] < mapsize[1] and tree_map[int(p_search[0])][int(p_search[1])] != 0): flag = False break -
p_curr到p_next的路径上是否存在障碍物d_next = distance(p_curr, p_next) direction = (p_next - p_curr) / np.linalg.norm((p_next - p_curr)) for d_search in range(1, int(d_next) + 1): p_search = p_curr + d_search * direction if not (0 <= p_search[0] < mapsize[0] and 0 <= p_search[1] < mapsize[1] and tree_map[int(p_search[0])][int(p_search[1])] != 0): # 是否为安全点 flag = False break
如果同时满足这三个条件,则认为点p_next可行,p_curr到p_next的路径可行,此时在p_next产生一个新节点,其父节点为p_curr,
parenttree = tree_map[int(p_curr[0])][int(p_curr[1])]
newtree = rtt_treenode(p_next, parent=parenttree,
cost_from_start=parenttree.cost + step,
dis_to_aim=distance(p_next, aim))
tree_map[int(p_next[0])][int(p_next[1])] = newtree
parenttree.children.append(newtree)
p_record.append(p_next)
e = newtree.dis
5.树生长的终止条件
当查找到一个节点,其与目标点的距离小于epsilon,则终止;或迭代次数超出设定值,终止。
6.最优路径搜索
这里使用A*算法进行搜索。
def A_star(root, eposilon):
q = PriorityQueue()
q.push(root)
while q.size() != 0:
node_curr = q.pop()
for child in node_curr.children:
# 生成树时已经去重,搜索时不再进行
if child.dis < eposilon: # 目标点
return child.path()
q.push(child)
return []
7.结果展示
设置参数为
p_sample=0.1, maxlimit=5000, step=100, eposilon=50, Q_save=10
得到的结果为:
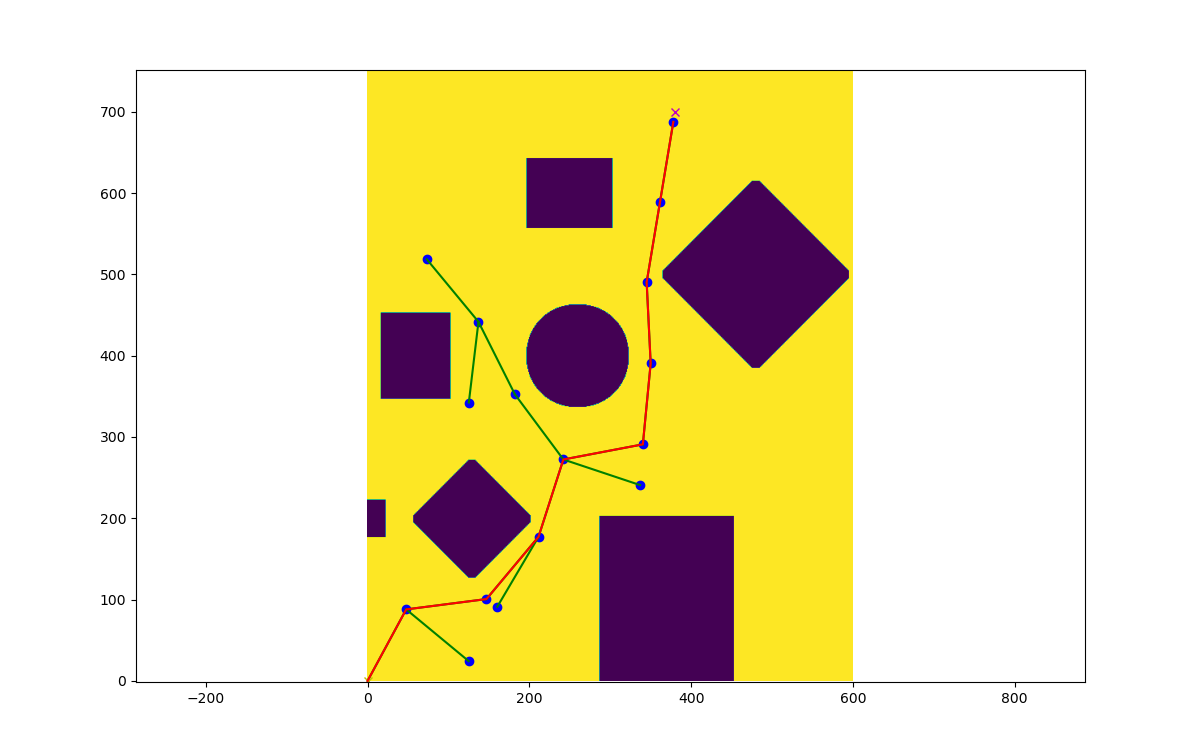
在UE中设置障碍物,上图中的10个像素点对应UE中的1米,即步长为10米,误差为5米,安全距离为1米。将上图中得到的路径点调整为AirSim中的航路点后,使用之前完成的航路点跟踪算法,得到的飞行效果如下:
(航路点跟踪算法见 https://blog.csdn.net/k_kun/article/details/125726077?spm=1001.2014.3001.5501)
RRT方法路径规划AirSim+四旋翼仿真
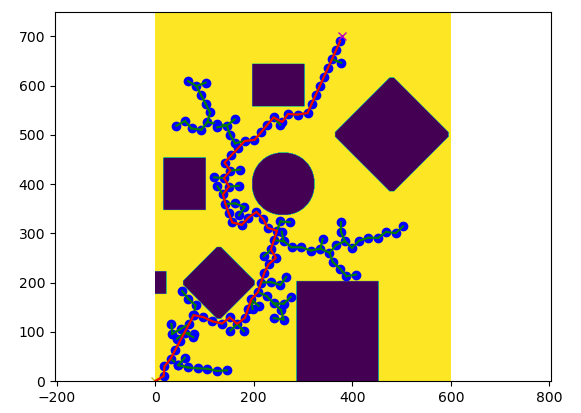
设置不同的参数,将得到不同的效果。将采样概率修改为0.5后,得到树的随机性变大,分枝数变多:

继续修改参数,将步长调整为20后,得到的树节点更加密集,计算量也更大。此时,AirSim仿真中两个航路点的距离为2米,距离过短,在较快速度下的飞行效果比较差。
RRT方法参考来源:https://zhuanlan.zhihu.com/p/66047152















 436
436











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









