







CUDA编程——GPU架构,由sp,sm,thread,block,grid,warp说起
掌握部分硬件知识,有助于程序员编写更好的CUDA程序,提升CUDA程序性能,本文目的是理清sp,sm,thread,block,grid,warp之间的关系。由于作者能力有限,难免有疏漏,恳请读者批评指正。
首先我们要明确:SP(streaming Process),SM(streaming multiprocessor)是硬件(GPU hardware)概念。而thread,block,grid,warp是软件上的(CUDA)概念。
从硬件看
- SP:最基本的处理单元,streaming processor,也称为CUDA core。最后具体的指令和任务都是在SP上处理的。GPU进行并行计算,也就是很多个SP同时做处理。
- SM:多个SP加上其他的一些资源组成一个streaming multiprocessor。也叫GPU大核,其他资源如:warp scheduler,register,shared memory等。SM可以看做GPU的心脏(对比CPU核心),register和shared memory是SM的稀缺资源。CUDA将这些资源分配给所有驻留在SM中的threads。因此,这些有限的资源就使每个SM中active warps有非常严格的限制,也就限制了并行能力。
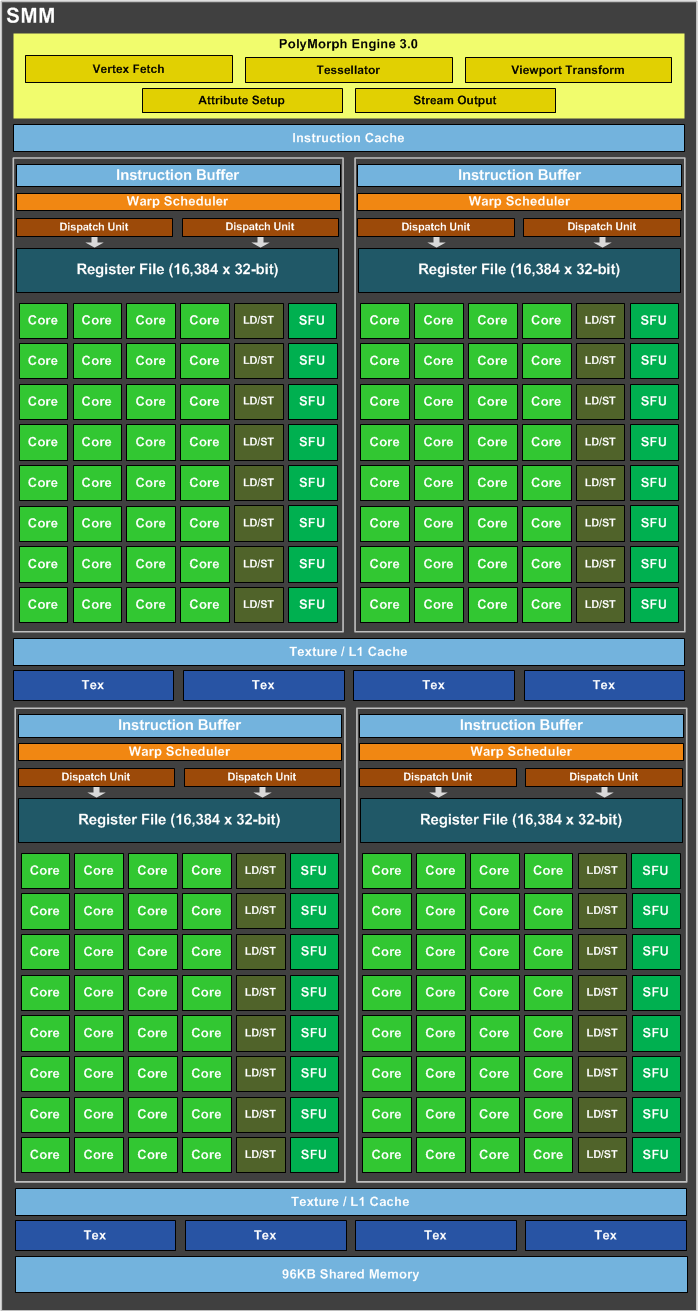
需要指出,每个SM包含的SP数量依据GPU架构而不同,Fermi架构GF100是32个,GF10X是48个,Kepler架构都是192个,Maxwell都是128个。相同架构的GPU包含的SM数量则根据GPU的中高低端来定。下图给出Nvidia GTX980 的一个SM示意图,图中每个绿色框框表示一个SP。注意,在Maxwell架构中,Nvidia已经把SM改叫SMM。下图表示的仅仅是一个SMM,一个GPU可以有多个SM(比如16个),最终一个GPU可能包含有上千个SP。这么多核心“同时运行”,速度可想而知,这个引号只是想表明实际上,软件逻辑上是所有SP是并行的,但是物理上并不是所有SP都能同时执行计算,因为有些会处于挂起,就绪等其他状态,这有关GPU的线程调度,以后再写了。
原图
从软件看
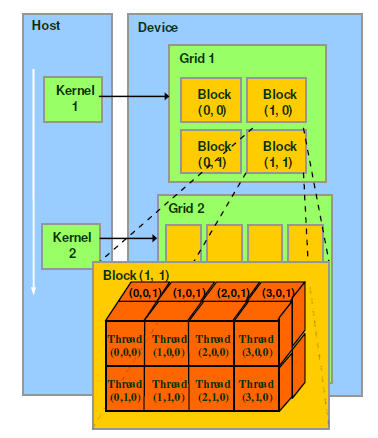
thread,block,grid,warp是CUDA编程上的概念,以方便程序员软件设计,组织线程,同样的我们给出一个示意图来表示。
- thread:一个CUDA的并行程序会被以许多个threads来执行。
- block:数个threads会被群组成一个block,同一个block中的threads可以同步,也可以通过shared memory通信。
- grid:多个blocks则会再构成grid。
- warp:GPU执行程序时的调度单位,目前cuda的warp的大小为32,同在一个warp的线程,以不同数据资源执行相同的指令,这就是所谓 SIMT。
对应关系
从软件上看,SM更像一个独立的CPU core。SM(Streaming Multiprocessors)是GPU架构中非常重要的部分,GPU硬件的并行性就是由SM决定的。以Fermi架构为例,其包含以下主要组成部分:
- CUDA cores
- Shared Memory/L1Cache
- Register File
- Load/Store Units
- Special Function Units
- Warp Scheduler
GPU中每个sm都设计成支持数以百计的线程并行执行,并且每个GPU都包含了很多的SM,所以GPU支持成百上千的线程并行执行。当一个kernel启动后,thread会被分配到这些SM中执行。大量的thread可能会被分配到不同的SM,同一个block中的threads必然在同一个SM中并行(SIMT)执行。每个thread拥有它自己的程序计数器和状态寄存器,并且用该线程自己的数据执行指令,这就是所谓的Single Instruction Multiple Thread。
一个SP可以执行一个thread,但是实际上并不是所有的thread能够在同一时刻执行。Nvidia把32个threads组成一个warp,warp是调度和运行的基本单元。warp中所有threads并行的执行相同的指令。一个warp需要占用一个SM运行,多个warps需要轮流进入SM。由SM的硬件warp scheduler负责调度。目前每个warp包含32个threads(Nvidia保留修改数量的权利)。所以,一个GPU上resident thread最多只有 SM*warp个。
SIMT和SIMD
CUDA是一种典型的SIMT架构(单指令多线程架构),SIMT和SIMD(Single Instruction, Multiple Data)类似,SIMT应该算是SIMD的升级版,更灵活,但效率略低,SIMT是NVIDIA提出的GPU新概念。二者都通过将同样的指令广播给多个执行官单元来实现并行。一个主要的不同就是,SIMD要求所有的vector element在一个统一的同步组里同步的执行,而SIMT允许线程们在一个warp中独立的执行。SIMT有三个SIMD没有的主要特征:
- 每个thread拥有自己的instruction address counter
- 每个thread拥有自己的状态寄存器
- 每个thread可以有自己独立的执行路径
更细节的差异可以看这里。
前面已经说block是软件概念,一个block只会由一个sm调度,程序员在开发时,通过设定block的属性,**“告诉”**GPU硬件,我有多少个线程,线程怎么组织。而具体怎么调度由sm的warps scheduler负责,block一旦被分配好SM,该block就会一直驻留在该SM中,直到执行结束。一个SM可以同时拥有多个blocks,但需要序列执行。下图显示了软件硬件方面的术语对应关系:

需要注意的是,大部分threads只是逻辑上并行,并不是所有的thread可以在物理上同时执行。例如,遇到分支语句(if else,while,for等)时,各个thread的执行条件不一样必然产生分支执行,这就导致同一个block中的线程可能会有不同步调。另外,并行thread之间的共享数据会导致竞态:多个线程请求同一个数据会导致未定义行为。CUDA提供了cudaThreadSynchronize()来同步同一个block的thread以保证在进行下一步处理之前,所有thread都到达某个时间点。
同一个warp中的thread可以以任意顺序执行,active warps被sm资源限制。当一个warp空闲时,SM就可以调度驻留在该SM中另一个可用warp。在并发的warp之间切换是没什么消耗的,因为硬件资源早就被分配到所有thread和block,所以该新调度的warp的状态已经存储在SM中了。不同于CPU,CPU切换线程需要保存/读取线程上下文(register内容),这是非常耗时的,而GPU为每个threads提供物理register,无需保存/读取上下文。
总结
掌握部分硬件知识,有助于CUDA性能提升。















 5354
5354

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









