







 该博客介绍了如何运用Meanshift算法实现移动目标跟踪。通过提供的链接,展示了目标跟踪过程,从红色初始位置到绿色跟踪位置的变化。
该博客介绍了如何运用Meanshift算法实现移动目标跟踪。通过提供的链接,展示了目标跟踪过程,从红色初始位置到绿色跟踪位置的变化。
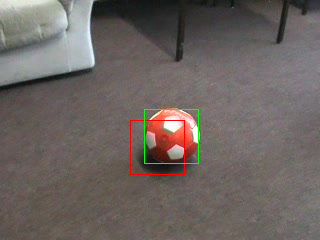
利用Meanshift算法进行了移动目标跟踪,图片资源如下:
链接:https://yunpan.cn/cq9GfQDrsDL7r 密码:b135
红色方框为初始位置,绿色方框为跟踪到的位置。

#include <opencv2/opencv.hpp>
using namespace cv;
int histSize[1] = {256};
float hranges[2] = {0, 255};
const float* ranges[1] = {hranges};
int channels[1] = {0};
int main()
{
VideoCapture cap("E:/Datasets/img%4d.jpg");
Rect rect(200, 115, 45, 45);
Mat frame, frameHSV, imgROI, dstHist, backproj;
cap >> frame;
cvtColor(frame, frameHSV, COLOR_RGB2HSV);
imgROI = frameHSV(rect);
calcHist(&imgROI, 1, channels, Mat(), dstHist, 1, histSize, ranges);
normalize(dstHist, dstHist, 0.0, 1.0, NORM_MINMAX);
rectangle(frame, rect, Scalar(0, 0, 255));
imshow("Frame", frame);
waitKey(0);
while (true)
{
cap >> frame;
if (frame.empty()) break;
cvtColor(frame, frameHSV, COLOR_RGB2HSV);
calcBackProject(&frameHSV, 1, channels, dstHist, backproj, ranges, 255.0);
TermCriteria criteria(TermCriteria::MAX_ITER + TermCriteria::EPS, 1000, 0.001);
meanShift(backproj, rect, criteria);
imgROI = frameHSV(rect);
calcHist(&imgROI, 1, channels, Mat(), dstHist, 1, histSize, ranges);
normalize(dstHist, dstHist, 0.0, 1.0, NORM_MINMAX);
rectangle(frame, rect, Scalar(0, 255, 0));
imshow("Frame", frame);
waitKey(30);
}
return 0;
}














 1611
1611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









