






C#运动控制加视觉非标自动化软件框架,运动控制设计部分采用流程图式设计,可以根据框架自定义C#+halcon或者C#?VP全新 ,源码,该软件出自Green point
YID:3985646038049009
用户_20317043


标题:基于C#的运动控制加视觉非标自动化软件框架设计与实现
摘要:
本文介绍了一种基于C#的运动控制加视觉非标自动化软件框架的设计与实现方法。该框架采用流程图式设计,提供了自定义C#语言结合Halcon或者C#?VP全新的源码,可以用于快速开发非标自动化设备。本文详细介绍了软件框架的整体架构,运动控制设计和视觉处理的集成方法。实际案例演示了框架的功能和效果,验证了其在非标自动化领域的实用性。
-
引言
非标自动化设备的开发在工业生产中起到了至关重要的作用,然而,该领域的软件开发相对较难,尤其是运动控制和视觉处理的集成。为了提高非标自动化设备的开发效率和灵活性,本文提出了一种基于C#的运动控制加视觉非标自动化软件框架。 -
软件框架设计
2.1 整体架构
该软件框架采用了模块化的设计思想,整体架构分为三个主要模块:运动控制模块、视觉处理模块和用户界面模块。其中,运动控制模块负责设备的运动控制功能,视觉处理模块负责设备的图像采集和处理功能,用户界面模块负责提供友好的用户交互界面。
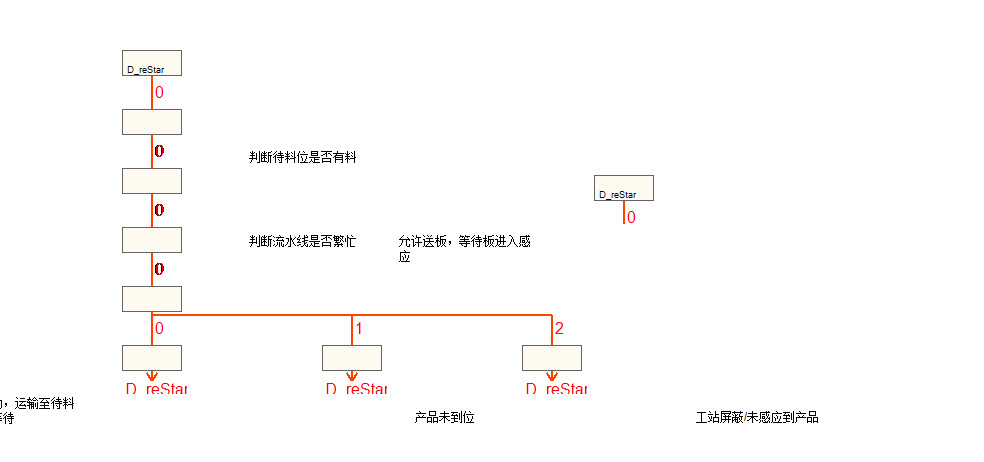
2.2 流程图式设计
为了提供灵活的开发方式,本框架采用了流程图式设计。用户可以通过拖拽和连接不同的模块来构建整个设备的控制流程。该设计方式简化了开发流程,降低了开发门槛,提高了开发效率。
- 运动控制设计
3.1 运动控制硬件选型
本框架支持多种运动控制硬件,用户可根据实际需求选择合适的硬件平台。例如,可以选择市面上常用的伺服电机、步进电机等。
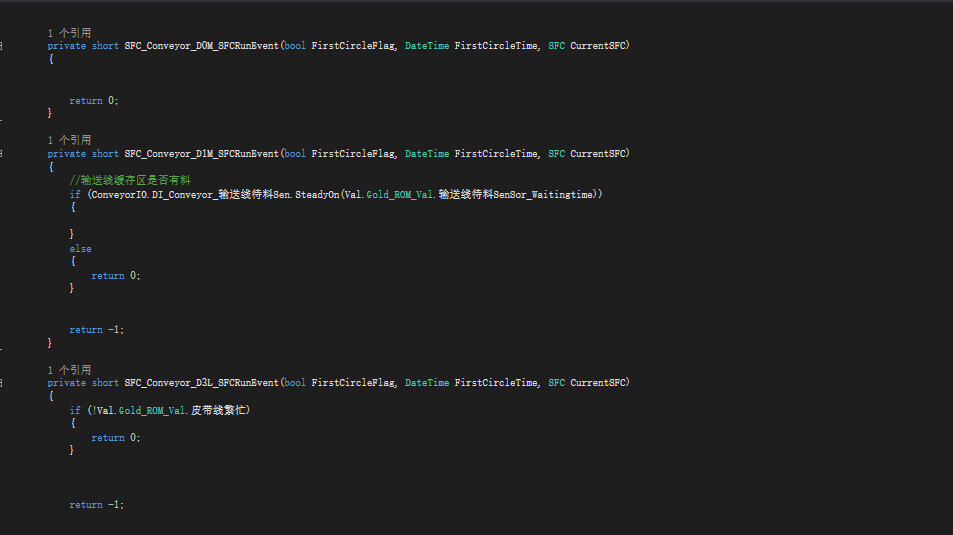
3.2 运动控制模块设计
该模块负责与运动控制硬件进行通信,实现设备的运动控制功能。通过定义不同的运动指令和参数,用户可以灵活控制设备的移动、停止、回零等动作。
- 视觉处理设计
4.1 视觉采集与处理
视觉处理模块负责设备的图像采集和处理功能。通过调用Halcon或者C#?VP全新的源码,可以实现丰富的图像处理功能,如图像识别、测量、定位等。
4.2 视觉检测算法设计
针对不同的非标自动化设备,本框架提供了多种视觉检测算法的封装和接口。用户可以根据实际需求选择合适的算法,并进行参数调整和优化。
-
实际案例演示
本文通过一个实际案例演示了框架的功能和效果。该案例是基于该框架开发的一台非标自动化设备,实现了物体的抓取和定位功能。演示结果表明,该框架具有较高的稳定性和灵活性,能够满足非标自动化设备的实际需求。 -
结论与展望
本文介绍了一种基于C#的运动控制加视觉非标自动化软件框架的设计与实现方法。该框架通过流程图式设计、自定义C#语言结合Halcon或者C#?VP全新的源码,提供了快速开发非标自动化设备的能力。实际案例验证了该框架的实用性和灵活性。未来,我们将进一步完善框架的功能和性能,丰富框架的应用案例,并提供更加便捷的使用方式。
关键词:C#、运动控制、视觉处理、非标自动化、软件框架
以上相关代码,程序地址:http://matup.cn/646038049009.html















 691
691

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









