






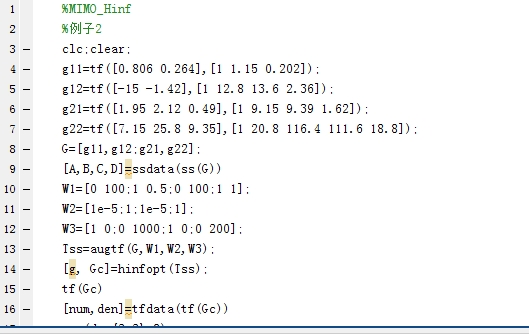
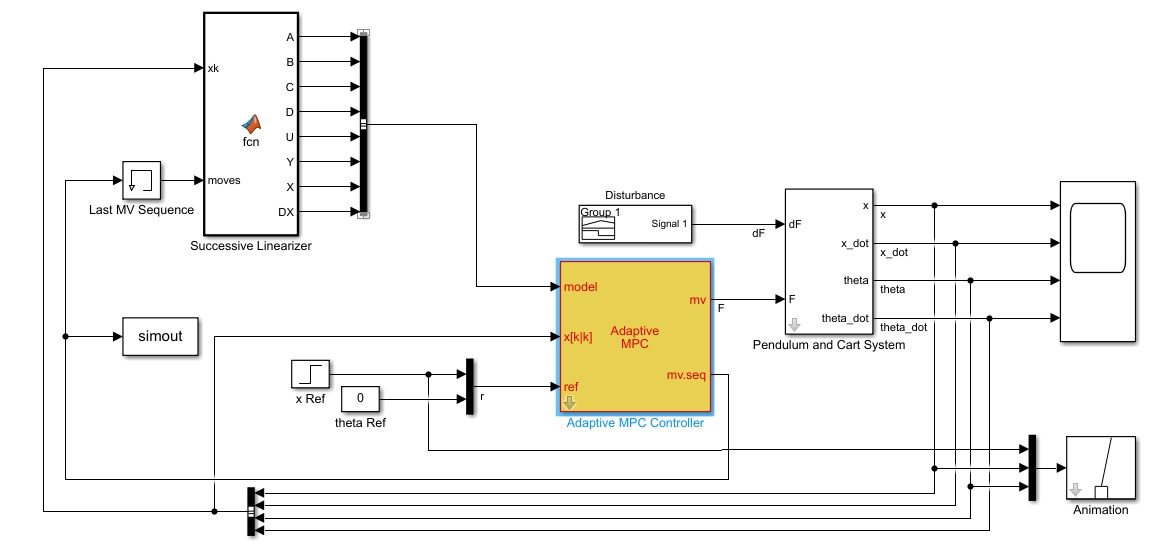
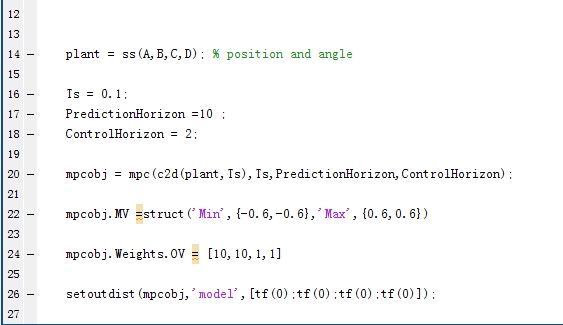
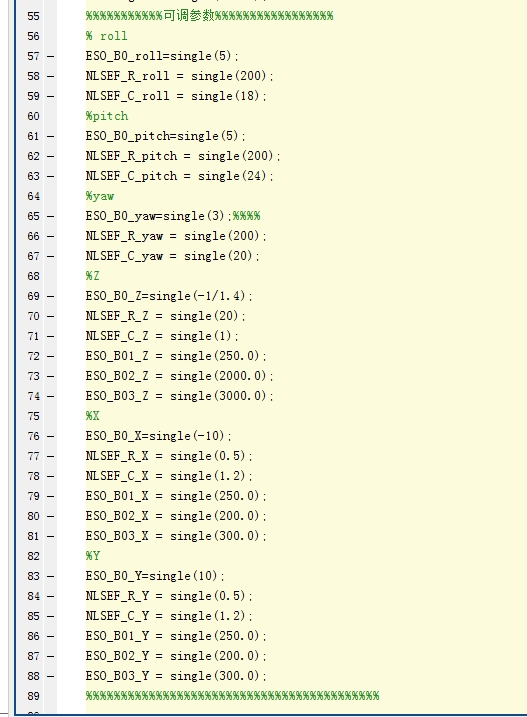
ADRC,自抗扰控制器,扩张状态观测器,ESO,模型预测控制算法MPC,自适应模型预测控制算法,时变模型预测控制算法,H无穷算法,混合灵敏度,鲁棒控制算法,四旋翼,直升机,控制算法设计,仿真模型,算法移植,算法部署,算法C代码生成。
ID:69400646080540961
欲买桂花同载酒
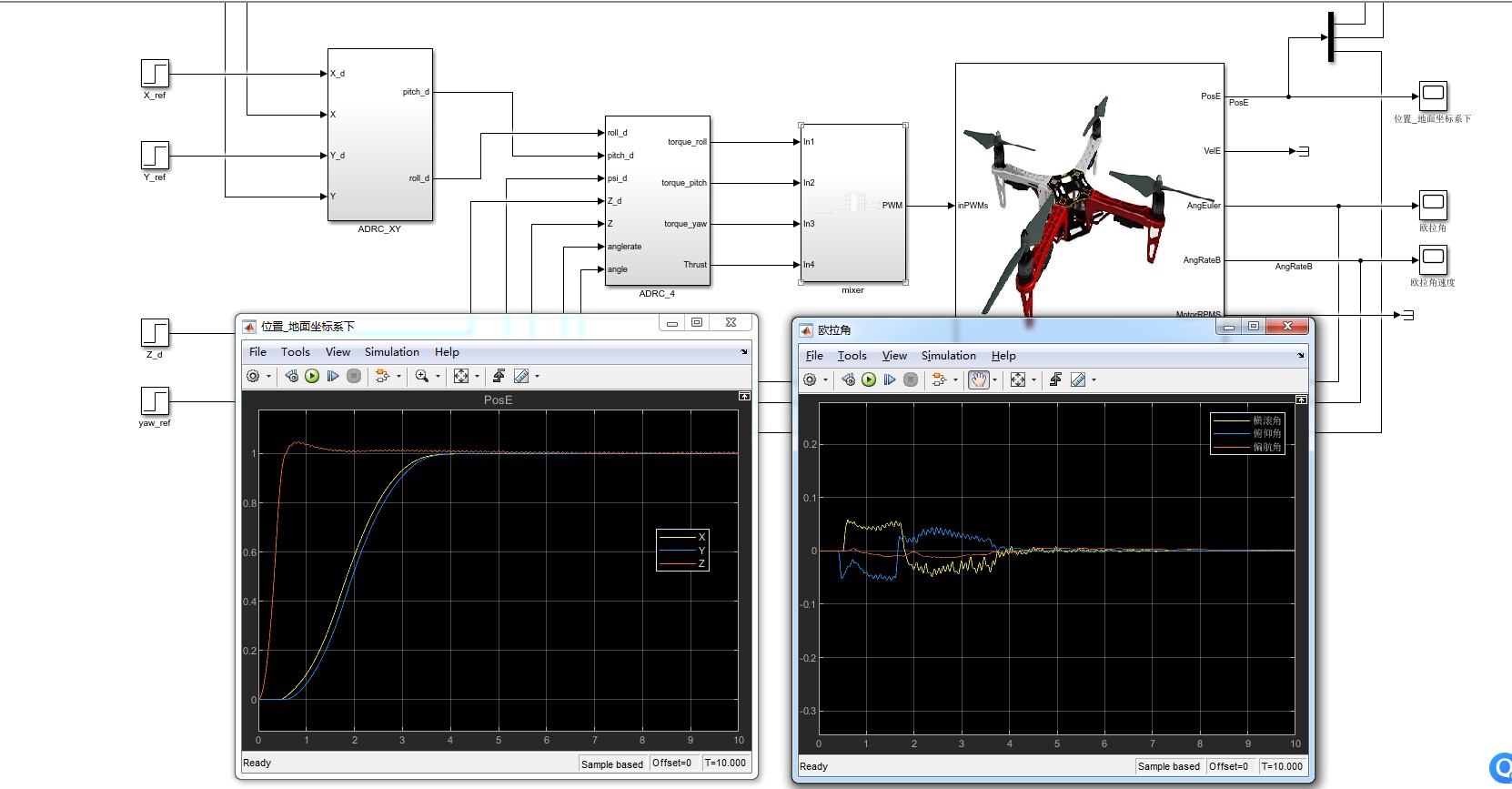
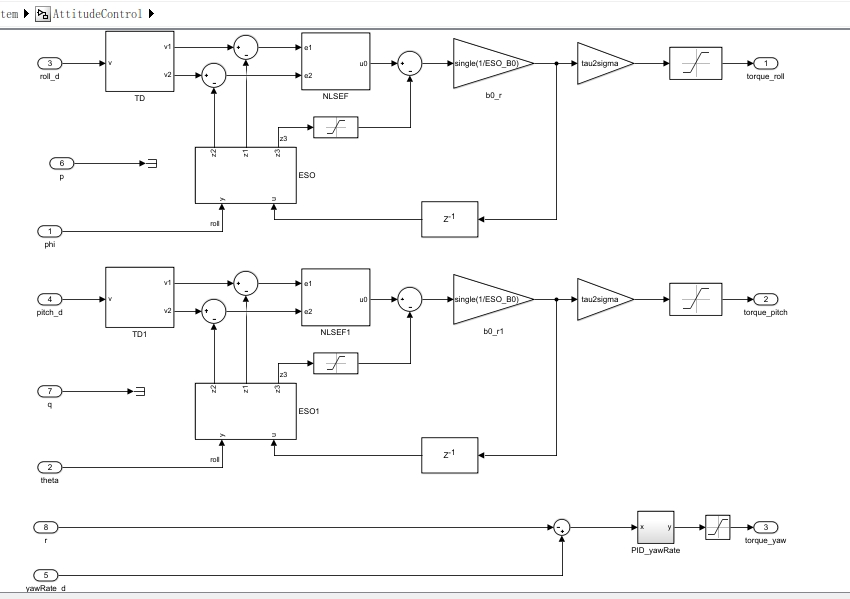
ADRC(Active Disturbance Rejection Control,自抗扰控制)是一种新兴的控制方法,它通过引入扩张状态观测器(ESO)来实现对系统扰动的有效抑制。本文将探讨ADRC控制器在四旋翼直升机控制算法设计中的应用及其相关技术。
在控制系统设计中,传统的PID控制器常常无法满足复杂系统的精确控制需求,特别是在面对扰动干扰较大的情况下。而ADRC控制器凭借其出色的抗干扰能力和良好的控制性能,逐渐成为工程实践中的一种重要选择。
ADRC控制器利用扩张状态观测器(ESO)对系统的扰动进行在线估计和补偿,通过对系统扰动的动态建模,使控制器能够追踪和抵消系统扰动,从而提高系统的控制性能和鲁棒性。ESO模块的设计需要考虑系统的特性和扰动的频率范围,以实现对扰动的准确估计和有效补偿。
除了ESO模块外,ADRC控制器还包括参数调节模块和控制输出模块。参数调节模块通过自适应算法实时调整控制器的参数,以适应系统参数变化和扰动的变化。控制输出模块根据系统扰动的估计值和控制误差,生成最优的控制输出。这种结构使得ADRC控制器具有较强的适应性和鲁棒性,能够应对不确定性和扰动干扰的挑战。
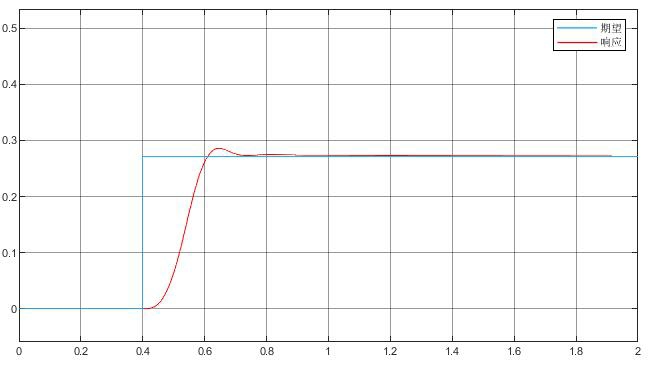
在实际应用中,ADRC控制器在四旋翼直升机控制算法设计中具有广泛的应用前景。通过合理设计和调整ADRC控制器的参数,可以实现四旋翼直升机的高精度控制和优秀的鲁棒性能。同时,ADRC控制器可以通过仿真模型进行验证和优化,在保证系统安全的前提下,提高控制算法的效果和可靠性。
另外,对于实际系统的应用,ADRC控制器的算法移植和部署也是非常重要的环节。根据目标系统的硬件平台和性能需求,可以将ADRC控制器的算法进行优化和实时化,并生成对应的C代码。这样可以有效减少系统的计算负载和响应时间,并提高算法的实时性和可行性。
总结起来,ADRC控制器是一种新兴的控制方法,可以有效抑制复杂系统中的扰动干扰,提高系统的控制性能和鲁棒性。在四旋翼直升机控制算法设计中,ADRC控制器具有广泛的应用前景,通过合理设计和调整参数,可以实现高精度控制和优秀的鲁棒性能。同时,算法的优化、移植和部署也是实际应用中需要考虑的关键问题。通过对ADRC控制器的研究和应用,可以进一步推动控制算法的发展和应用。
以上相关代码,程序地址:http://matup.cn/646080540961.html















 844
844

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









