







 文章介绍了如何在STM32微控制器中利用高级定时器实现两路PWM信号的移相输出,频率固定为100kHz,占空比可调,并在中断回调中改变移相角。通过设置TIMx_ARR和TIMx_CCRx寄存器控制频率和占空比,使用非对称PWM模式1或2,通过TIMx_CCMRx寄存器配置。文中提到的关键代码展示了如何设置CCR寄存器生成具有任意移相角的PWM波形。
文章介绍了如何在STM32微控制器中利用高级定时器实现两路PWM信号的移相输出,频率固定为100kHz,占空比可调,并在中断回调中改变移相角。通过设置TIMx_ARR和TIMx_CCRx寄存器控制频率和占空比,使用非对称PWM模式1或2,通过TIMx_CCMRx寄存器配置。文中提到的关键代码展示了如何设置CCR寄存器生成具有任意移相角的PWM波形。
一 目标
完成两路PWM移相输出,固定频率100kHZ,占空比自定,设置中断,在中断回调函数里改变移相角。本次暂缓理论部分输出,直接寻找方法搭模型。
二 设计步骤—实验
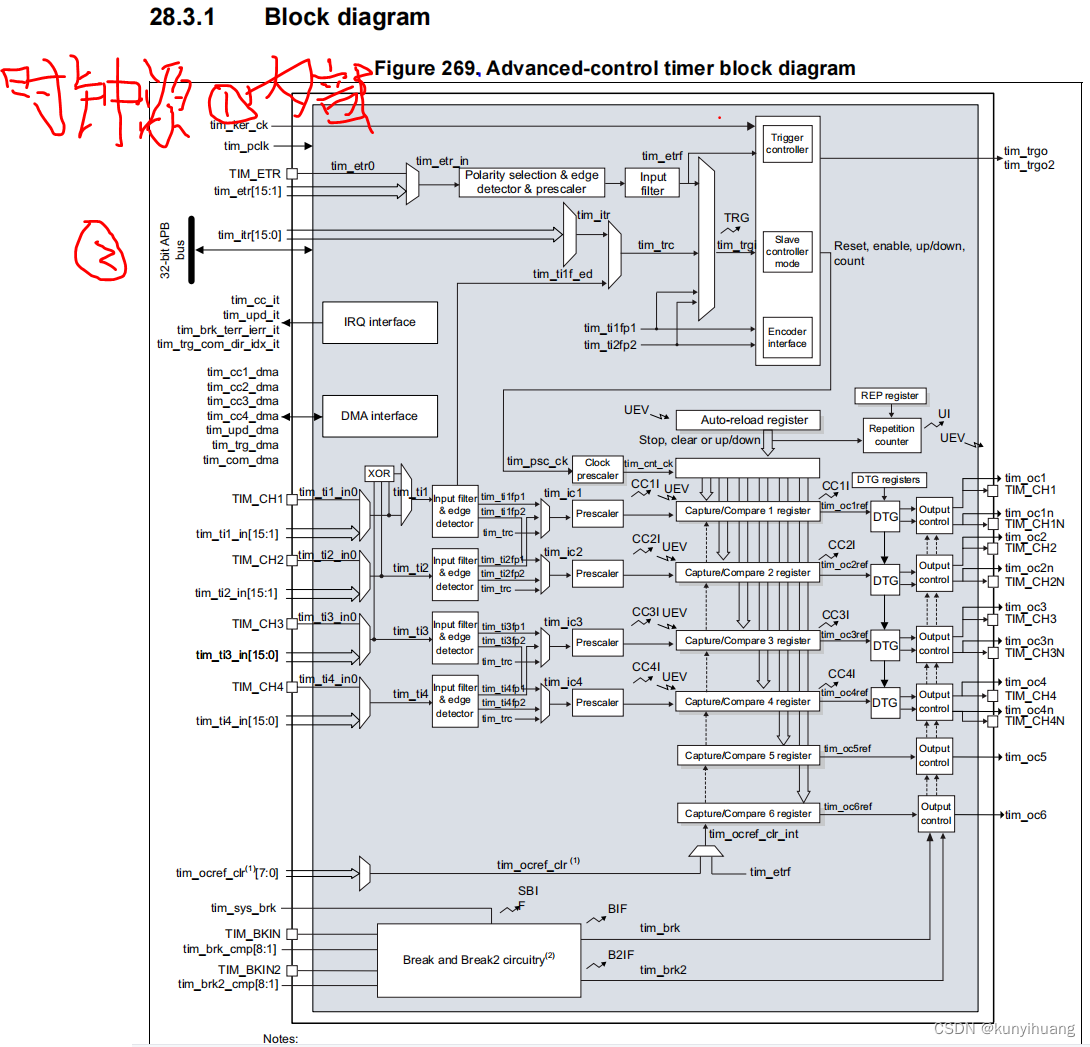
不对称模式允许两个中心对齐的PWM信号通过可编程相移产生。频率由TIMx_ARR寄存器的值决定,而占空比和相移则由一对TIMx_CCRx寄存器决定。一个寄存器在向上计数时控制PWM,第二个在向下计数时控制PWM,因此PWM每半个PWM周期调整一次,其中:
tim_oc1refc(或tim_oc2refc)由TIMx_CCR1和TIMx_CCR2控制
tim_oc3refc(或tim_oc4refc)由TIMx_CCR3和TIMx_CCR4控制
非对称PWM模式可以在两个通道上独立选择(每对CCR寄存器有一个tim_ocx输出),通过在TIMx_CCMRx寄存器中的OCxM位中写入“1110”(非对称PWM模式1)或“1111”(非对称PWM模式2)。由于兼容性的原因,OCx M [ 3:0 ]位域被拆分为两部分,最重要的位与最不重要的3个位不相邻。
当给定通道作为非对称PWM通道时,也可以使用其互补通道。例如,如果在通道1 (不对称PWM模式1)上产生一个tim _ oc1refc信号,则可以在通道2上输出一个tim _ oc2ref信号,也可以在不对称PWM模式1上输出一个tim _ oc2ref
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2270
2270

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









