







转自:http://blog.csdn.net/qianqing13579/article/details/42323397#comments
在OpenCV滤波算法中,有两个非常重要的基本工具函数,copyMakeBorder和borderInterpolate
这里也会提到getRectSubPix。
1. copyMakeBorder
函数原型
void copyMakeBorder( const Mat& src, Mat& dst,
int top, int bottom, int left, int right,
int borderType, const Scalar& value=Scalar() );
源码在utils.cpp中
功能
扩充src边缘,将图像变大,便于处理边界,该函数调用了cv::borderInterpolate,
其中:
src,dst:原图与目标图像
top,bottom,left,right分别表示在原图四周扩充边缘的大小
borderType:扩充边缘的类型,OpenCV中给出以下几种方式
* BORDER_REPLICATE
* BORDER_REFLECT
* BORDER_REFLECT_101
* BORDER_WRAP
* BORDER_CONSTANT
实际中,还有其他的宏定义
//! various border interpolation methods
enum { BORDER_REPLICATE=IPL_BORDER_REPLICATE, BORDER_CONSTANT=IPL_BORDER_CONSTANT,
BORDER_REFLECT=IPL_BORDER_REFLECT, BORDER_WRAP=IPL_BORDER_WRAP,
BORDER_REFLECT_101=IPL_BORDER_REFLECT_101, BORDER_REFLECT101=BORDER_REFLECT_101,
BORDER_TRANSPARENT=IPL_BORDER_TRANSPARENT,
BORDER_DEFAULT=BORDER_REFLECT_101, BORDER_ISOLATED=16 };
这几种方式到底什么意思呢?
OpenCV给出了解释:
代码来自源码:filter.cpp
/*
Various border types, image boundaries are denoted with '|'
* BORDER_REPLICATE: aaaaaa|abcdefgh|hhhhhhh
* BORDER_REFLECT: fedcba|abcdefgh|hgfedcb
* BORDER_REFLECT_101: gfedcb|abcdefgh|gfedcba
* BORDER_WRAP: cdefgh|abcdefgh|abcdefg
* BORDER_CONSTANT: iiiiii|abcdefgh|iiiiiii with some specified 'i'
*/
个人觉得OpenCV解释的还是挺形象的
这里我们重点看下面这非常常见的几种
BORDER_REPLICATE:复制法,也就是复制最边缘像素。
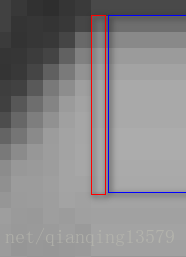
如上图,红色区域为src的最边界像素,蓝色区域是扩充的边界,我们将边缘扩大了5个像素(right=5),蓝色区域的宽度就是5,复制了5次红色区域的值
这种方式也就是OpenCV中的中值滤波medianBlur采用的边界处理方式
BORDER_REFLECT_101:对称法,也就是以最边缘像素为轴,对称。
下面我们看图
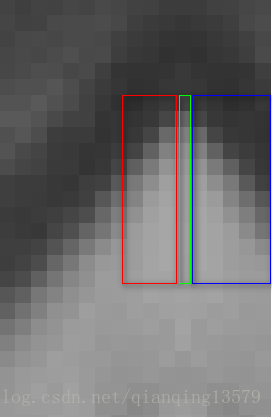
绿色区域是src最边界的像素,蓝色区域是我们扩充的5个像素的扩充边界,而红色区域就是蓝色区域在src的对称部分
这种方式也是OpenCV边界处理的默认方式(BORDER_DEFAULT=BORDER_REFLECT_101)
也是filter2D,blur,GaussianBlur,bilateralFilter的默认处理方式,所以这种方式在边界处理中应用还是非常广泛的
BORDER_CONSTANT:常量法。
常量法就是以一个常量像素值(由参数 value给定)填充扩充的边界值,这种方式在仿射变换,透视变换中非常常见
如下图,
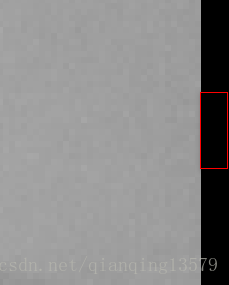
我们使用了默认的value,黑色填充了边界,所以红色区域的扩充的5个像素宽的边界是黑色的
在copyMakeBorder的内部,调用了函数borderInterpolate
2. borderInterpolate
函数原型
int borderInterpolate( int p, int len, int borderType );
源码在filter.cpp中
功能
计算扩充的像素对应原图哪个坐标的像素
其中
p:该扩充图像的像素在原图中某一坐标轴上的坐标(注意:是在原图中的坐标!)
len:扩充像素对应的原图像的坐标轴的长度
borderType:扩充类型
示例:
程序中使用的图像大小为1000x580(宽1000,高580)
结果:
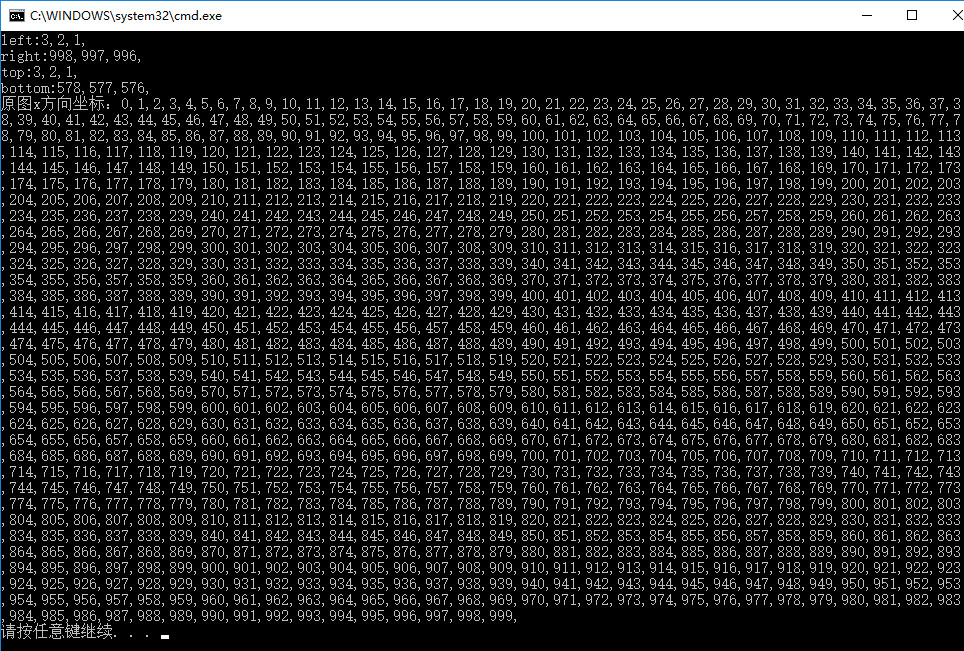
这段代码中,我们要计算左边扩充的像素在原图x方向上的坐标,由于borderInterpolate的第一个参数是扩充像素在原图中某一坐标轴上的坐标,注意,这些坐标是相对于原图来说的,由于原图最左边像素的坐标为0,所以这些扩充像素相对于原图坐标就是为负数,而left大小为3,所以i-left依次为-3,-2,-1,也就是扩充的3个像素在原图中的坐标为-3,-2,-1。borderInterpolate的第二个参数是原图像的坐标轴的长度,由于计算的x方向的坐标,对应x方向的长度,所以是cols。扩充类型是BORDER_REFLECT_101,对称法,从上面BORDER_REFLECT_101的示意图可以很容易看出,扩充的像素对应原图像素的坐标为3,2,1。
3. getRectSubPix
从图像中提取象素矩形,使用子像素精度。这里所说的子像素精度是指,如果给定的矩形坐标不是整数,可以通过双线性插值的方式获得。
在平时的使用中经常会用整数的
C++: void getRectSubPix(InputArray image, Size patchSize, Point2f center, OutputArray dst, int patchType=-1 )
C:void cvGetRectSubPix( const CvArr* src, CvArr* dst, CvPoint2D32f center );
src : 输入图像.
patchSize 是矩形的大小
dst : 提取的矩形
patchType: 提取图像的深度,默认(-1)和src相同
center : 提取的象素矩形的中心,浮点数坐标。中心必须位于图像内部.
函数 cvGetRectSubPix 从图像 src 中提取矩形:
dst(x, y) = src(x + center.x - (width(dst)-1)*0.5, y + center.y - (height(dst)-1)*0.5)
其中非整数象素点坐标采用双线性插值提取。对多通道图像,每个通道独立单独完成提取。尽管函数要求矩形的中心一定要在输入图像之中,但是有可能出现矩形的一部分超出图像边界的情况,这时,该函数复制边界的模识(replication border mode)(即用与矩形相交的图像边界线段的像素来代替矩形超越部分的像素)。
也就是说超过部分是用靠近的边界的值来填充的。















 853
853

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









