









1、简介
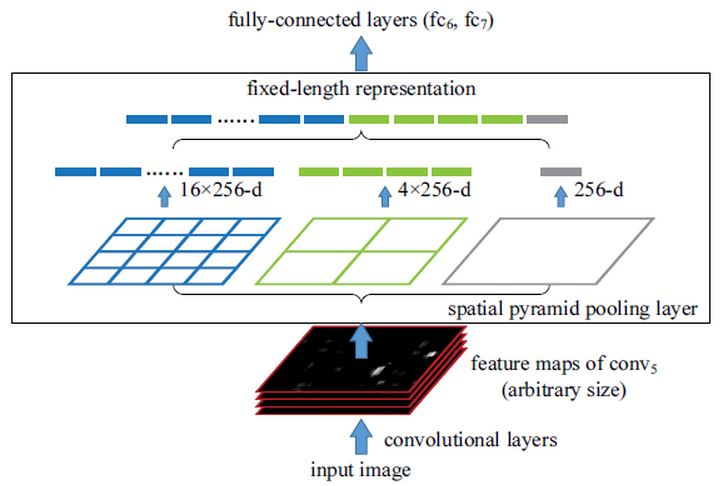
空间金字塔池化,使得任意大小的特征图都能够转换成固定大小的特征向量,这就是空间金字塔池化的意义(多尺度特征提取出固定大小的特征向量),送入全连接层。整体框架大致为:输入图像,卷积层提取特征,空间金字塔池化提取固定大小特征,全连接层。
具体的流程图如下:
2、具体算法的大体流程
首先通过选择性搜索(selective search),对待检测的图片进行搜索出2000个候选窗口。这一步和R-CNN一样。
特征提取阶段。这一步就是和R-CNN最大的区别了,同样是用卷积神经网络进行特征提取,但是SPP-Net用的是金字塔池化。这一步骤的具体操作如下:把整张待检测的图片,输入CNN中,进行一次性特征提取,得到feature maps,然后在feature maps中找到各个候选框的区域,再对各个候选框采用金字塔空间池化,提取出固定长度的特征向量。而R-CNN输入的是每个候选框,然后在进入CNN,因为SPP-Net只需要一次对整张图片进行特征提取,速度是大大地快啊。江湖传说可一个提高100倍的速度,因为R-CNN就相当于遍历一个CNN两千次,而SPP-Net只需要遍历1次。
最后采用SVM算法进行特征向量分类识别,和R-CNN一样。
3、关键步骤解释:
3.1 如何在feature maps中找到原始图片中候选框的对应区域:
候选框是通过一整张原图片进行检测得到的,而feature maps的大小和原始图片的大小是不同的,feature maps是经过原始图片卷积、下采样等一系列操作后得到的。
直接利用计算的公式:假设(x’,y’)表示特征图上的坐标点,坐标点(x,y)表示原输入图片上的点,那么它们之间有如下转换关系:
(x,y)=(S*x’,S*y’)
其中S的就是CNN中所有的步长(strides)的乘积,反过来,通过(x,y)坐标求解(x’,y’),那么计算公式如下:
x’=x/S+1
输入原图片检测到的windows,可以得到每个矩形候选框的四个角点,然后再根据公式:
Left、Top: x’=x/S+1
Right、Bottom: x’=x/S-1
3.2 空间金字塔池化如何提取特征,得到固定大小的特征向量:
我们假设一个很简单两层网络:输入一张任意大小的图片,假设其大小为(w,h),输出21个神经元。也就是我们输入一张任意大小的特征图的时候,我们希望提取出21个特征。空间金字塔特征提取的过程如下:
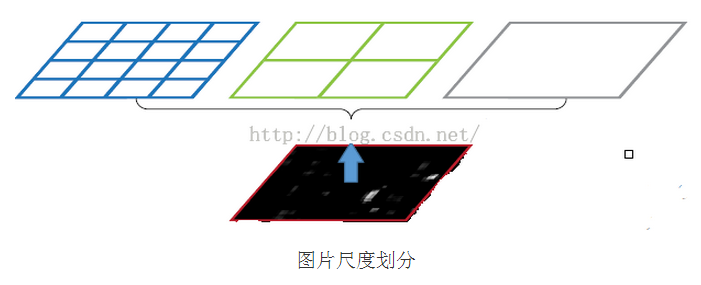
如上图所示,当我们输入一张图片的时候,我们利用不同大小的刻度,对一张图片进行了划分。上面示意图中,利用了三种不同大小的刻度(4*4,2*2,1*1),对一张输入的图片进行了划分,最后总共可以得到16+4+1=21个块,我们即将从这21个块中,每个块提取出一个特征,这样刚好就是我们要提取的21维特征向量。
第一张图片,我们把一张完整的图片,分成了16个块,也就是每个块的大小就是(w/4,h/4);
第二张图片,划分了4个块,每个块的大小就是(w/2,h/2);
第三张图片,把一整张图片作为了一个块,也就是块的大小为(w,h)。
空间金字塔最大池化的过程,其实就是从这21个图片块中,分别计算每个块的最大值,从而得到一个输出神经元。最后把一张任意大小的图片转换成了一个固定大小的21维特征(当然你可以设计其它维数的输出,增加金字塔的层数,或者改变划分网格的大小)。上面的三种不同刻度的划分,每一种刻度我们称之为:金字塔的一层,每一个图片块大小我们称之为:windows size了。如果你希望,金字塔的某一层输出n*n个特征,那么你就要用windows size大小为:(w/n,h/n)进行池化了。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









