






四旋翼飞行器轨迹跟踪仿真路径规划控制 路径规划与轨迹 最小加速度轨迹最小捕捉轨迹 四旋翼无人机
ID:6429669115433777
爱小马的海盐大傻
四旋翼飞行器是一种利用四个电动机驱动的航空器,具有垂直起降和悬停的能力,广泛应用于航空领域和工业领域。为了实现飞行器的自主飞行和任务执行,路径规划与轨迹控制是关键技术之一。
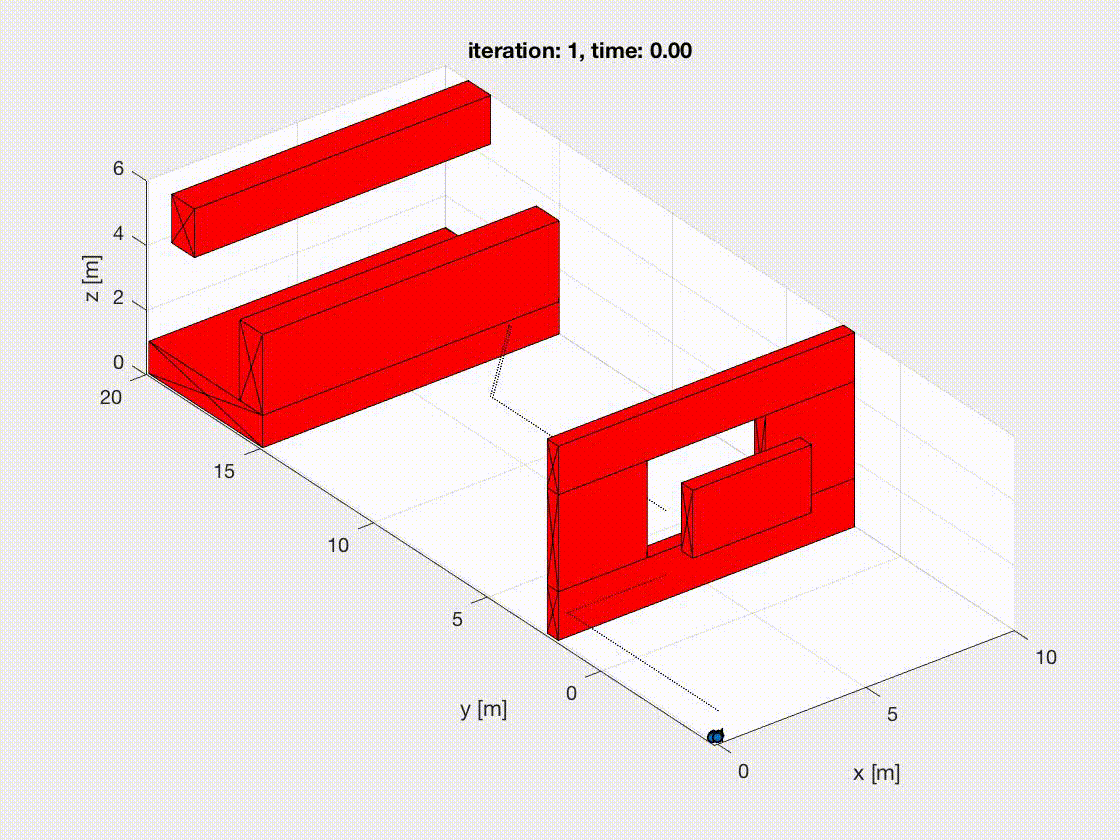
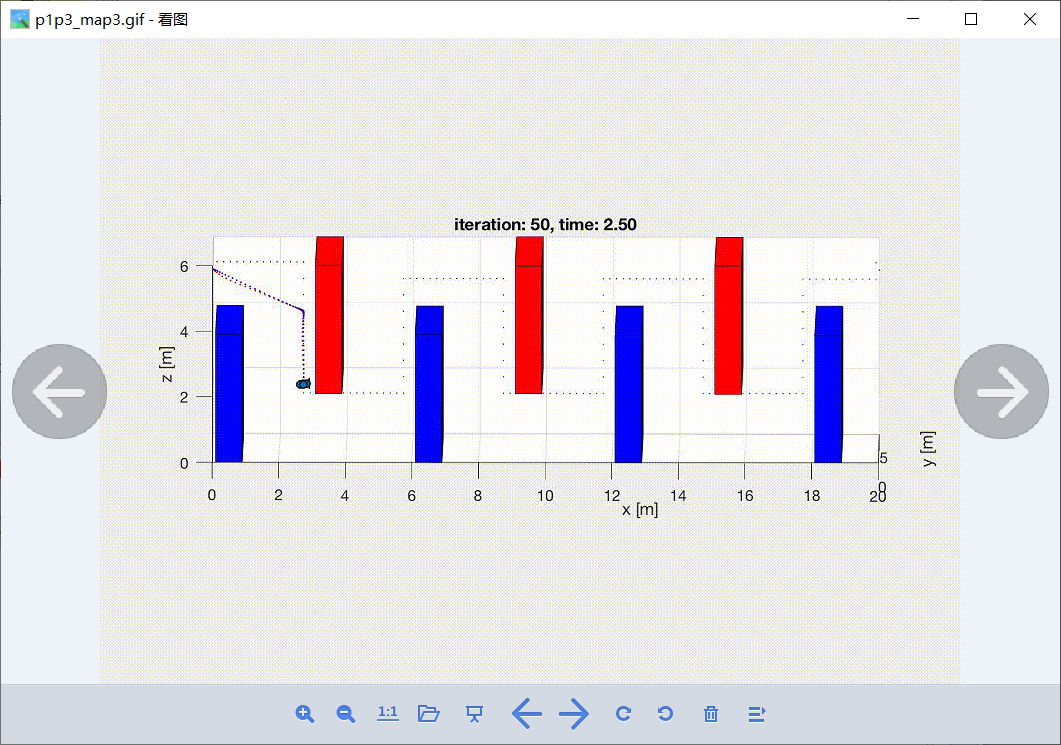
路径规划是指根据特定的目标和约束条件,通过算法计算出一条合理的路径,使飞行器能够在空中自主飞行,避开障碍物,并到达目标地点。路径规划算法一般分为全局路径规划和局部路径规划两种。
全局路径规划是在整个飞行空间内进行规划,目标是找到一条从起点到目标点的最优路径。最常用的全局路径规划算法有A*算法、Dijkstra算法和RRT(Rapidly-exploring Random Trees)算法等。这些算法通过对环境信息进行建模和搜索,可以在较短的时间内找到一条适合飞行器飞行的路径。
局部路径规划是在飞行器当前位置附近进行规划,目标是在实时性要求下避开障碍物,并沿着全局规划路径前进。常用的局部路径规划算法有B样条曲线和样条插值法等。这些算法通过对当前环境信息进行感知和分析,可以在较短的时间内生成一条能够避开障碍物的局部路径。
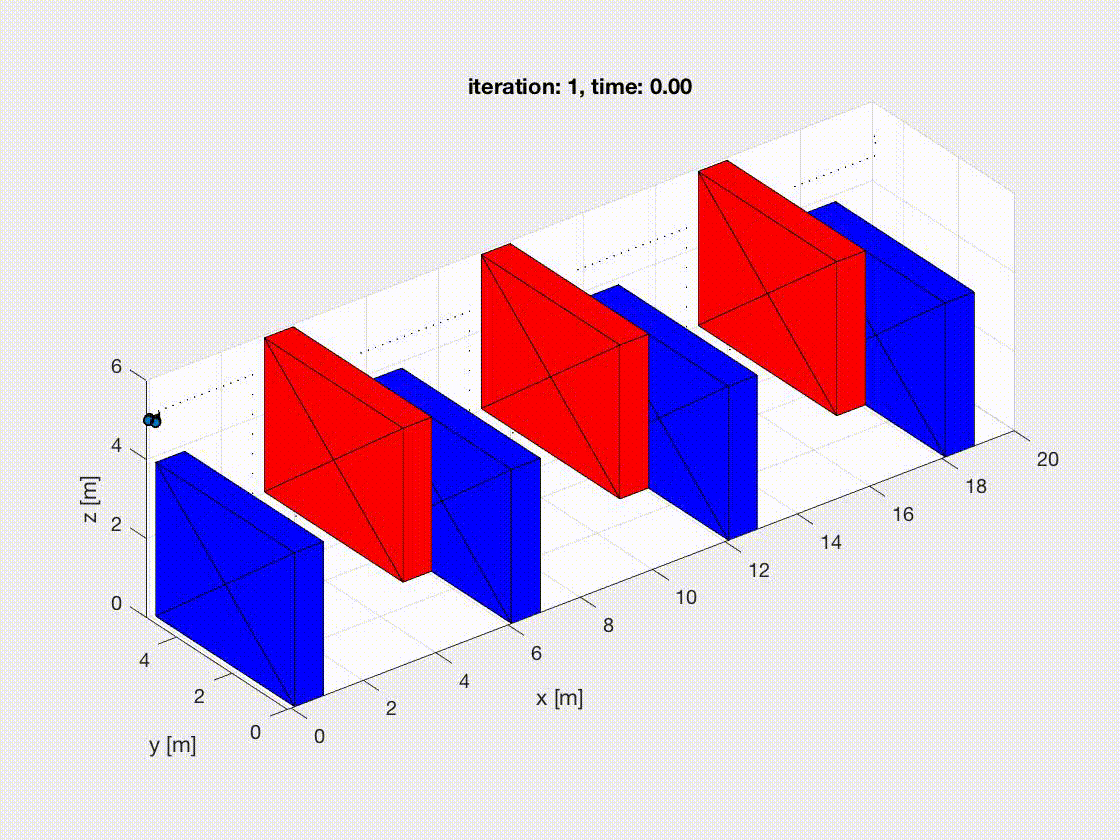
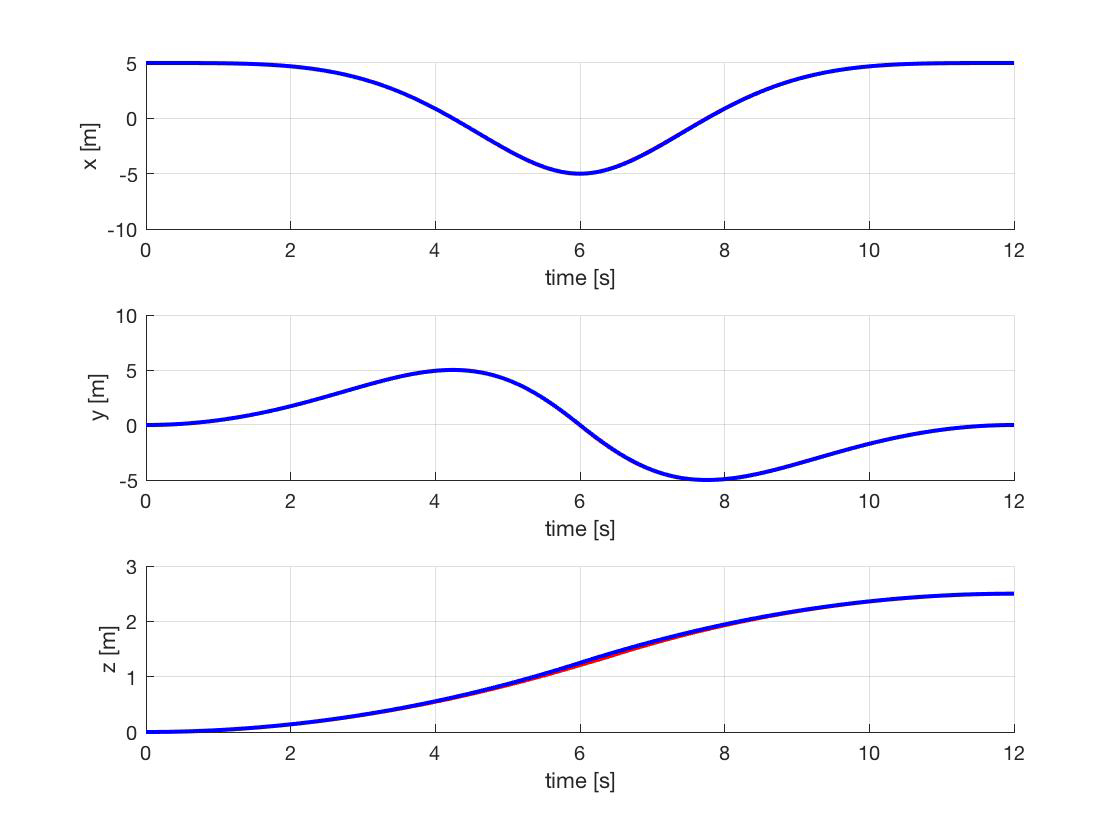
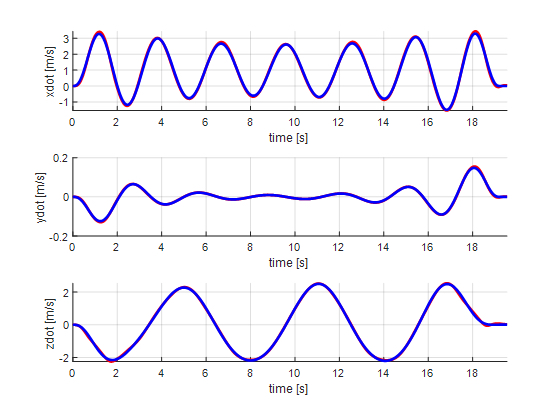
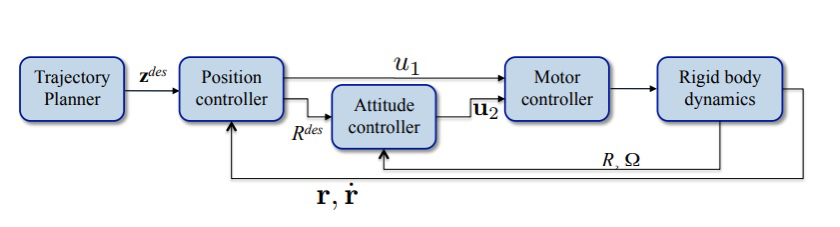
路径规划完成后,飞行器需要根据规划路径实现轨迹跟踪控制。轨迹跟踪控制是指飞行器根据路径规划结果,在实际飞行中精确地跟踪规划路径。最小加速度轨迹和最小捕捉轨迹是常用的轨迹跟踪控制策略。
最小加速度轨迹是指飞行器在规划的路径上以最小加速度的方式进行飞行。这种方式可以保证飞行器的动态性能较好,在加速度限制条件下尽可能减小飞行器的运动幅度。最小捕捉轨迹是指飞行器以最小捕捉误差的方式跟踪规划路径。这种方式可以使飞行器能够更精确地跟踪规划的路径,并减小轨迹跟踪误差。
四旋翼无人机是一种常用的飞行器,具有灵活机动性和较好的悬停能力,适用于各种应用场景。在四旋翼无人机的路径规划与轨迹控制中,可以借鉴其他航空器的技术和算法,同时也需要考虑到四旋翼无人机的特点和约束条件。
总之,路径规划与轨迹控制是四旋翼飞行器实现自主飞行和任务执行的关键技术。通过合理的路径规划和精确的轨迹跟踪控制,可以使飞行器能够安全高效地完成各种飞行任务。未来,随着无人机技术的不断发展和应用领域的拓展,路径规划与轨迹控制技术将变得更加成熟和先进,为无人机行业的发展带来新的机遇和挑战。
以上相关代码,程序地址:http://coupd.cn/669115433777.html















 563
563











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









