



参考链接:https://space.bilibili.com/1855672581?spm_id_from=333.788.b_765f7570696e666f.1
一、直流有刷电机
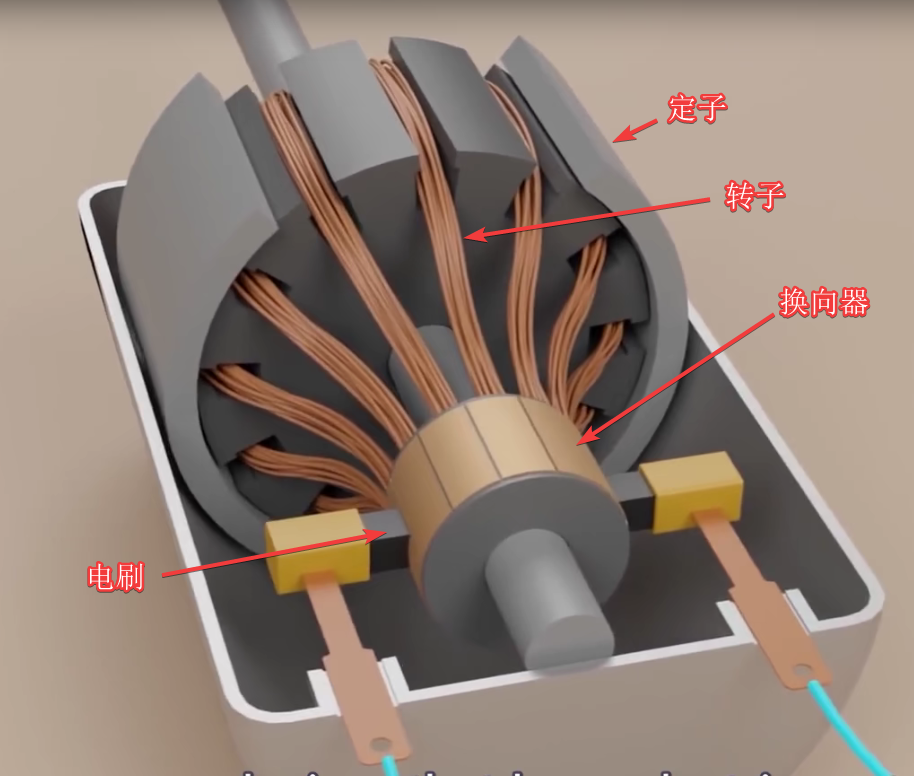
- 定子:一边一个定子为极性相反的电磁铁
- 转子:由很多线圈绕成,通电后就是电磁铁
- 换向器:换向器上连接着线圈,电机旋转时可以给不同线圈供电保持旋转
- 电刷:后面有个弹簧顶着,使它保持与换向器紧贴着供电
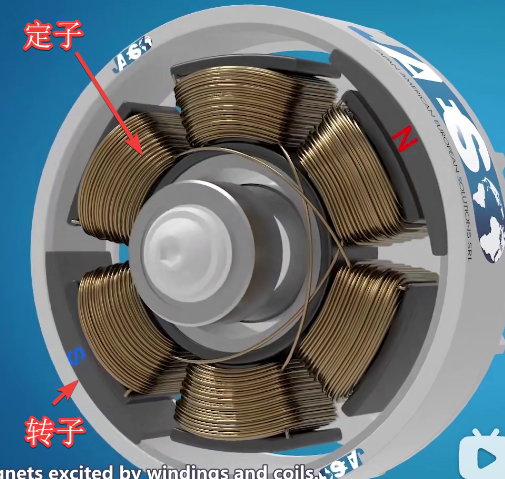
二、无刷直流电机
1.介绍
- 无刷电机没有电刷,内部不会产生火花或摩擦噪音,也不需要更换、维护电刷。
- 定子具有绕组和线圈激发的电磁铁
- 转子上带有两个极性相反的电磁铁
2.如何驱动
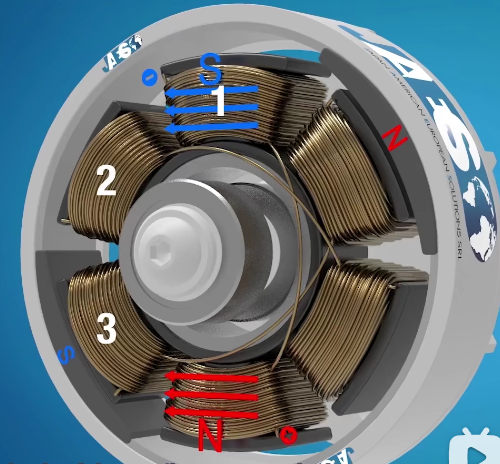
- 需要电力驱动器控制正确的励磁顺序
- 电磁铁有一个精确的励磁顺序,该顺序对永磁体施加旋转运动(顺序保持循环,维持电机旋转)
- 转子跟随定子内部电磁铁的励磁顺序旋转而永远不会追上它们
- 当电流流入线圈1时,转子和定子的异极相吸,当转子靠近线圈1时,电流在线圈2中流动,当转子靠近线圈2时,电流在线圈3中流动,当转子靠近线圈3时,电流在线圈1中再次流动,但极性相反,不断重复,确保转子恒定旋转。
3.增加转矩

- 增加转矩,在线圈总是2的倍数下,使用若干序列(比如接通1,2,关闭3)来增加永磁体受到的磁通量,这种设计增加点机可以提供的转矩。
4.霍尔传感器
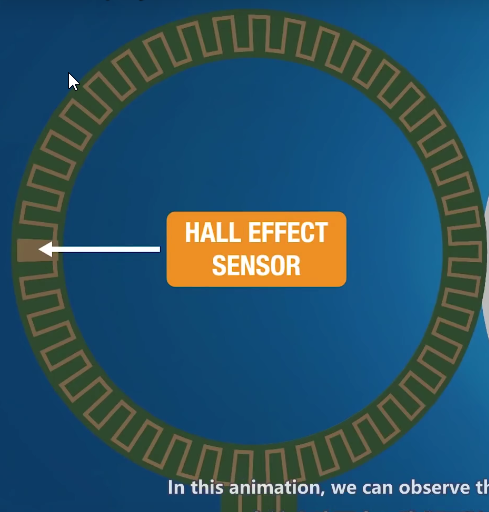
- 霍尔传感器用于检测转子的准确位置,从而可以控制正确的励磁顺序决定对哪个线圈通电。
三、步进电机
1、介绍
步进电机可以在没有闭环反馈回路的情况下精确控制转子位置,它是一个简单、准确且开环的系统。
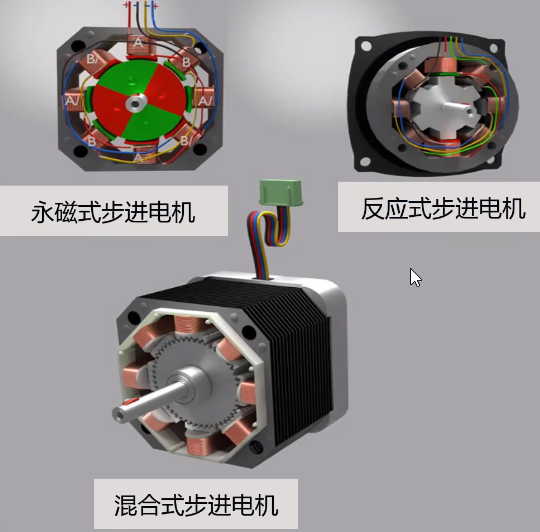
步进电机的分类
- 永磁式步进电机
- 反应式步进电机
- 混合式步进电机 ---- 常用的高精度电机,是永磁式和反应式电机的结合
2、反应式步进电机
-
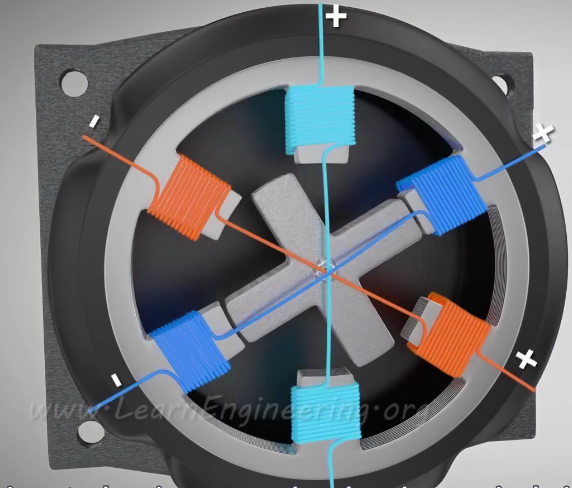
该电机有6个定子齿,有三个独立直流电源供电。
-
定子齿数与转子齿数不同,以便于一次只有一对转子齿与定子齿对齐。
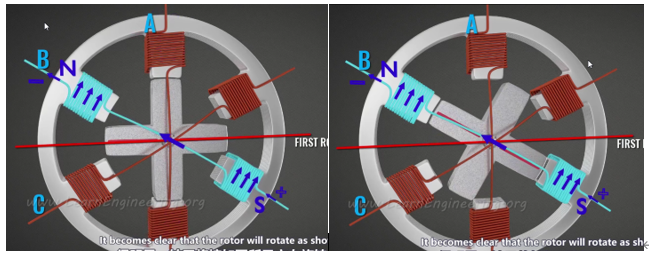
电机运动
先给线圈A断电,并给线圈B通电,转子将会顺时针旋转30°,然后给线圈B断电,并给线圈C通电,也会顺时针旋转30°,依次类推进行移动,简而言之,转子移动到最小的磁阻位置。这个点机的步长就是30°。
提高步长精度
首先是A通电,转子与A对齐
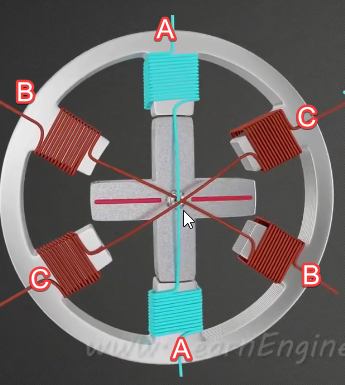
然后B也通电,A不断电,此时转子只移动了15°,
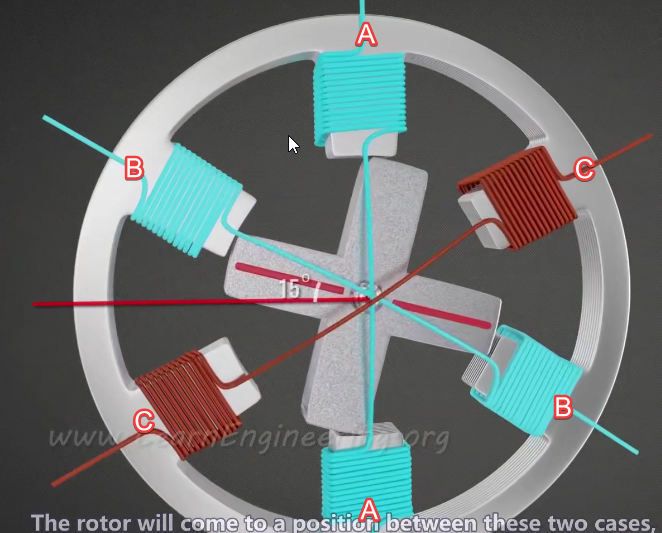
然后A断点,转子旋转15°与B对齐,以此类推是的步长从30°提高到15°。
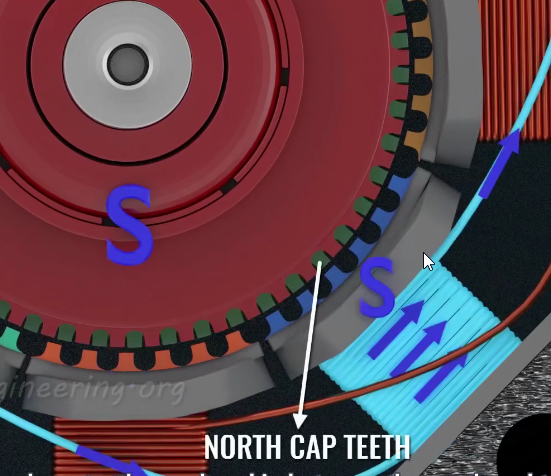
3、混合式步进电机
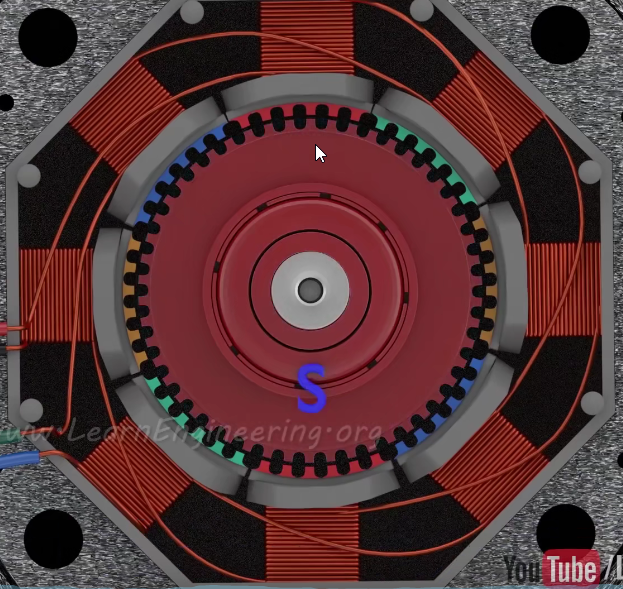
混合式电机有一个带有齿形钢帽的磁化转子。
定子齿有48个,转子齿有50个,红色齿与转子对齐,绿色齿和蓝色齿半对齐,黄色齿不对齐。
运动方式
图中主要有A、B两线圈,首先A通电时,异极相吸,红色齿对齐。
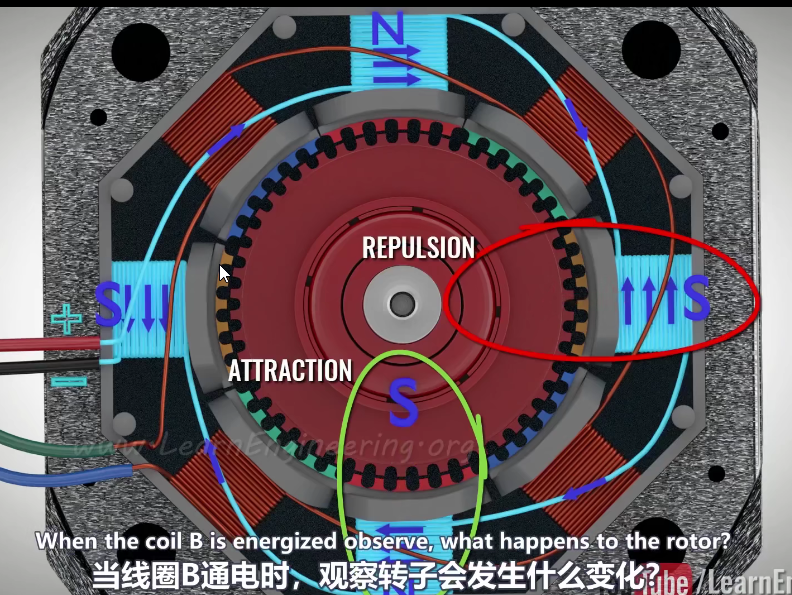
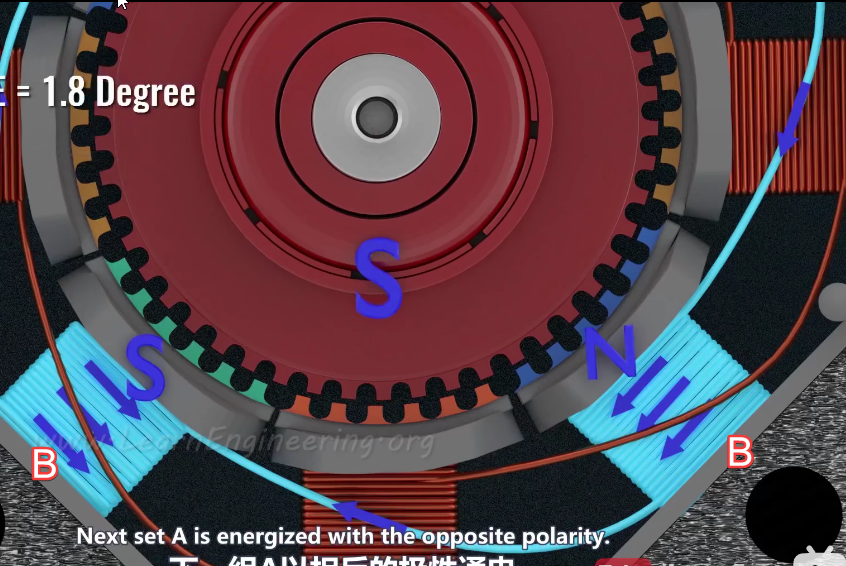
当B通电时,蓝色齿对齐,蓝色齿从半对齐变成对齐,移动了1.8°。
最巧妙的设计是,S极背面的N极齿帽位于S极齿之间,当外面的S极与定子不对齐时,背面的N极就能与之对齐,保证了相反极性的极点是对齐的。
四、异步电机
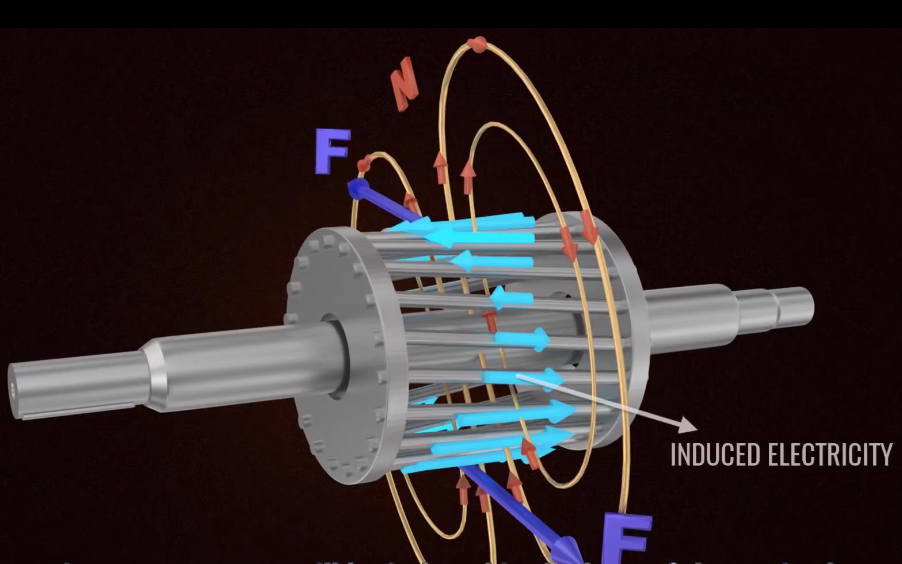
异步电机有两个主要部分,分别是定子和转子
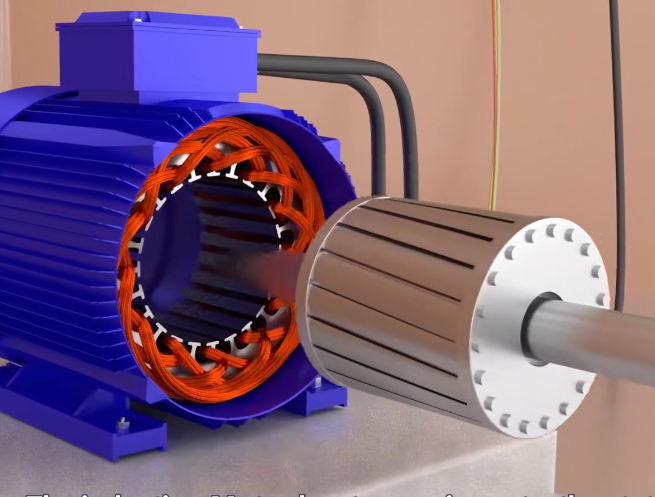
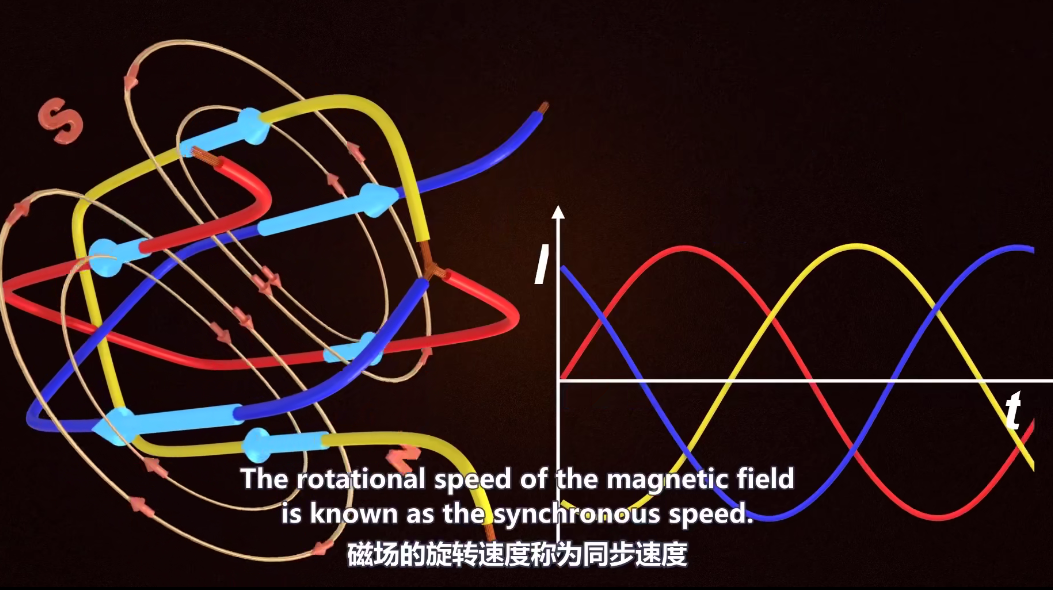
定子是三线圈绕组,三相交流电施加在这三组线圈上,当三相电流流过这个绕组时,会产生旋转磁场(磁场在旋转),旋转磁场是造成转子旋转的原因。
变化的磁场会在回路中感应出电动势,感应电动势会在回路中产生感应电流,根据洛伦兹力,载流线圈会产生电磁力,线圈开始旋转。
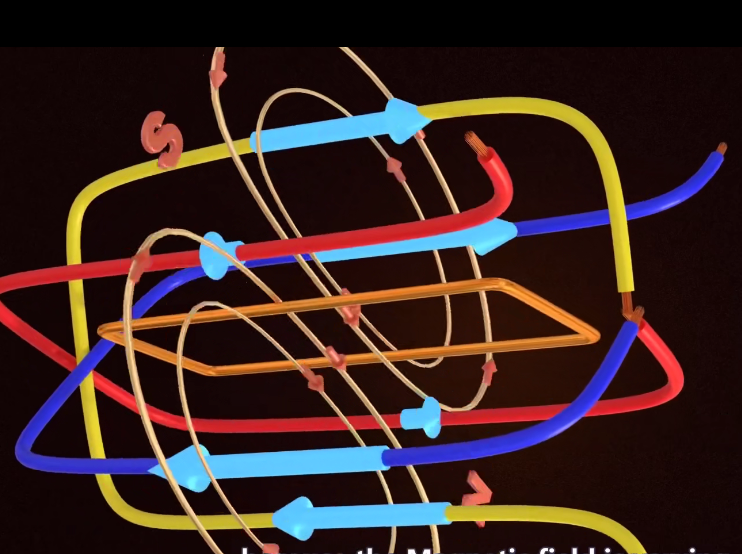
对于电机而言,这并不是一个简单的回路,而是类似于鼠笼的结构,三相交流电流过定子产生旋转磁场,因此,鼠笼的每一跟棒中都会产生感应电流,这些感应电流在鼠笼的两端被短路,因此转子开始旋转。
- 鼠笼中加入铁芯薄片确保了涡流损耗最小
- 三相异步电机可以实现自启动
- 异步电机不需要永磁体。
当转子的速度与旋转磁场速度一致时,磁场就无法切割铁棒,就会减速,当转子减速后,旋转磁场就可以切割铁棒,转子开始加速,总而言之,转子永远无法赶上磁场的速度。
可以通过控制输入电源的频率轻松控制异步电机的转速,通过使用变频驱动器可以非常容易地控制异步电机的转速。

















 3059
3059

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









