









=====================================================
H.264源代码分析文章列表:
【编码 - x264】
x264源代码简单分析:x264命令行工具(x264.exe)
x264源代码简单分析:x264_slice_write()
x264源代码简单分析:宏块分析(Analysis)部分-帧内宏块(Intra)
x264源代码简单分析:宏块分析(Analysis)部分-帧间宏块(Inter)
x264源代码简单分析:熵编码(Entropy Encoding)部分
【解码 - libavcodec H.264 解码器】
FFmpeg的H.264解码器源代码简单分析:解析器(Parser)部分
FFmpeg的H.264解码器源代码简单分析:解码器主干部分
FFmpeg的H.264解码器源代码简单分析:熵解码(EntropyDecoding)部分
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧内宏块(Intra)
FFmpeg的H.264解码器源代码简单分析:宏块解码(Decode)部分-帧间宏块(Inter)
FFmpeg的H.264解码器源代码简单分析:环路滤波(Loop Filter)部分
=====================================================
本文记录x264的 x264_slice_write()函数中调用的x264_macroblock_analyse()的源代码。x264_macroblock_analyse()对应着x264中的分析模块。分析模块主要完成了下面2个方面的功能:
(1)对于帧内宏块,分析帧内预测模式由于分析模块比较复杂,因此分成两篇文章记录其中的源代码:本文记录帧内宏块预测模式的分析,下一篇文章记录帧间宏块预测模式的分析。
(2)对于帧间宏块,进行运动估计,分析帧间预测模式
函数调用关系图
宏块分析(Analysis)部分的源代码在整个x264中的位置如下图所示。

宏块分析(Analysis)部分的函数调用关系如下图所示。

从图中可以看出,分析模块的x264_macroblock_analyse()调用了如下函数(只列举了几个有代表性的函数):
x264_mb_analyse_init():Analysis模块初始化。本文重点分析其中帧内宏块(Intra宏块)的分析函数x264_mb_analyse_intra()。下一篇文章再对x264_mb_analyse_inter_p16x16()等一系列帧间宏块的分析函数。
x264_mb_analyse_intra():Intra宏块帧内预测模式分析。
x264_macroblock_probe_pskip():分析是否是skip模式。
x264_mb_analyse_inter_p16x16():P16x16宏块帧间预测模式分析。
x264_mb_analyse_inter_p8x8():P8x8宏块帧间预测模式分析。
x264_mb_analyse_inter_p16x8():P16x8宏块帧间预测模式分析。
x264_mb_analyse_inter_b16x16():B16x16宏块帧间预测模式分析。
x264_mb_analyse_inter_b8x8():B8x8宏块帧间预测模式分析。
x264_mb_analyse_inter_b16x8():B16x8宏块帧间预测模式分析。
x264_slice_write()
x264_slice_write()是x264项目的核心,它完成了编码了一个Slice的工作。有关该函数的分析可以参考文章《 x264源代码简单分析:x264_slice_write()》。本文分析其调用的x264_mb_analyse()函数。x264_macroblock_analyse()
x264_macroblock_analyse()用于分析宏块的预测模式。该函数的定义位于encoder\analyse.c,如下所示。/****************************************************************************
* 分析-帧内预测模式选择、帧间运动估计等
*
* 注释和处理:雷霄骅
* http://blog.csdn.net/leixiaohua1020
* leixiaohua1020@126.com
****************************************************************************/
void x264_macroblock_analyse( x264_t *h )
{
x264_mb_analysis_t analysis;
int i_cost = COST_MAX;
//通过码率控制方法,获取本宏块QP
h->mb.i_qp = x264_ratecontrol_mb_qp( h );
/* If the QP of this MB is within 1 of the previous MB, code the same QP as the previous MB,
* to lower the bit cost of the qp_delta. Don't do this if QPRD is enabled. */
if( h->param.rc.i_aq_mode && h->param.analyse.i_subpel_refine < 10 )
h->mb.i_qp = abs(h->mb.i_qp - h->mb.i_last_qp) == 1 ? h->mb.i_last_qp : h->mb.i_qp;
if( h->param.analyse.b_mb_info )
h->fdec->effective_qp[h->mb.i_mb_xy] = h->mb.i_qp; /* Store the real analysis QP. */
//初始化
x264_mb_analyse_init( h, &analysis, h->mb.i_qp );
/*--------------------------- Do the analysis ---------------------------*/
//I帧:只使用帧内预测,分别计算亮度16x16(4种)和4x4(9种)所有模式的代价值,选出代价最小的模式
//P帧:计算帧内模式和帧间模式( P Slice允许有Intra宏块和P宏块;同理B帧也支持Intra宏块)。
//对P帧的每一种分割进行帧间预测,得到最佳的运动矢量及最佳匹配块。
//帧间预测过程:选出最佳矢量——>找到最佳的整像素点——>找到最佳的二分之一像素点——>找到最佳的1/4像素点
//然后取代价最小的为最佳MV和分割方式
//最后从帧内模式和帧间模式中选择代价比较小的方式(有可能没有找到很好的匹配块,这时候就直接使用帧内预测而不是帧间预测)。
if( h->sh.i_type == SLICE_TYPE_I )
{
//I slice
//通过一系列帧内预测模式(16x16的4种,4x4的9种)代价的计算得出代价最小的最优模式
intra_analysis:
if( analysis.i_mbrd )
x264_mb_init_fenc_cache( h, analysis.i_mbrd >= 2 );
//帧内预测分析
//从16×16的SAD,4个8×8的SAD和,16个4×4SAD中选出最优方式
x264_mb_analyse_intra( h, &analysis, COST_MAX );
if( analysis.i_mbrd )
x264_intra_rd( h, &analysis, COST_MAX );
//分析结果都存储在analysis结构体中
//开销
i_cost = analysis.i_satd_i16x16;
h->mb.i_type = I_16x16;
//如果I4x4或者I8x8开销更小的话就拷贝
//copy if little
COPY2_IF_LT( i_cost, analysis.i_satd_i4x4, h->mb.i_type, I_4x4 );
COPY2_IF_LT( i_cost, analysis.i_satd_i8x8, h->mb.i_type, I_8x8 );
//画面极其特殊的时候,才有可能用到PCM
if( analysis.i_satd_pcm < i_cost )
h->mb.i_type = I_PCM;
else if( analysis.i_mbrd >= 2 )
x264_intra_rd_refine( h, &analysis );
}
else if( h->sh.i_type == SLICE_TYPE_P )
{
//P slice
int b_skip = 0;
h->mc.prefetch_ref( h->mb.pic.p_fref[0][0][h->mb.i_mb_x&3], h->mb.pic.i_stride[0], 0 );
analysis.b_try_skip = 0;
if( analysis.b_force_intra )
{
if( !h->param.analyse.b_psy )
{
x264_mb_analyse_init_qp( h, &analysis, X264_MAX( h->mb.i_qp - h->mb.ip_offset, h->param.rc.i_qp_min ) );
goto intra_analysis;
}
}
else
{
/* Special fast-skip logic using information from mb_info. */
if( h->fdec->mb_info && (h->fdec->mb_info[h->mb.i_mb_xy]&X264_MBINFO_CONSTANT) )
{
if( !SLICE_MBAFF && (h->fdec->i_frame - h->fref[0][0]->i_frame) == 1 && !h->sh.b_weighted_pred &&
h->fref[0][0]->effective_qp[h->mb.i_mb_xy] <= h->mb.i_qp )
{
h->mb.i_partition = D_16x16;
/* Use the P-SKIP MV if we can... */
if( !M32(h->mb.cache.pskip_mv) )
{
b_skip = 1;
h->mb.i_type = P_SKIP;
}
/* Otherwise, just force a 16x16 block. */
else
{
h->mb.i_type = P_L0;
analysis.l0.me16x16.i_ref = 0;
M32( analysis.l0.me16x16.mv ) = 0;
}
goto skip_analysis;
}
/* Reset the information accordingly */
else if( h->param.analyse.b_mb_info_update )
h->fdec->mb_info[h->mb.i_mb_xy] &= ~X264_MBINFO_CONSTANT;
}
int skip_invalid = h->i_thread_frames > 1 && h->mb.cache.pskip_mv[1] > h->mb.mv_max_spel[1];
/* If the current macroblock is off the frame, just skip it. */
if( HAVE_INTERLACED && !MB_INTERLACED && h->mb.i_mb_y * 16 >= h->param.i_height && !skip_invalid )
b_skip = 1;
/* Fast P_SKIP detection */
else if( h->param.analyse.b_fast_pskip )
{
if( skip_invalid )
// FIXME don't need to check this if the reference frame is done
{}
else if( h->param.analyse.i_subpel_refine >= 3 )
analysis.b_try_skip = 1;
else if( h->mb.i_mb_type_left[0] == P_SKIP ||
h->mb.i_mb_type_top == P_SKIP ||
h->mb.i_mb_type_topleft == P_SKIP ||
h->mb.i_mb_type_topright == P_SKIP )
b_skip = x264_macroblock_probe_pskip( h );//检查是否是Skip类型
}
}
h->mc.prefetch_ref( h->mb.pic.p_fref[0][0][h->mb.i_mb_x&3], h->mb.pic.i_stride[0], 1 );
if( b_skip )
{
h->mb.i_type = P_SKIP;
h->mb.i_partition = D_16x16;
assert( h->mb.cache.pskip_mv[1] <= h->mb.mv_max_spel[1] || h->i_thread_frames == 1 );
skip_analysis:
/* Set up MVs for future predictors */
for( int i = 0; i < h->mb.pic.i_fref[0]; i++ )
M32( h->mb.mvr[0][i][h->mb.i_mb_xy] ) = 0;
}
else
{
const unsigned int flags = h->param.analyse.inter;
int i_type;
int i_partition;
int i_satd_inter, i_satd_intra;
x264_mb_analyse_load_costs( h, &analysis );
/*
* 16x16 帧间预测宏块分析-P
*
* +--------+--------+
* | |
* | |
* | |
* + + +
* | |
* | |
* | |
* +--------+--------+
*
*/
x264_mb_analyse_inter_p16x16( h, &analysis );
if( h->mb.i_type == P_SKIP )
{
for( int i = 1; i < h->mb.pic.i_fref[0]; i++ )
M32( h->mb.mvr[0][i][h->mb.i_mb_xy] ) = 0;
return;
}
if( flags & X264_ANALYSE_PSUB16x16 )
{
if( h->param.analyse.b_mixed_references )
x264_mb_analyse_inter_p8x8_mixed_ref( h, &analysis );
else{
/*
* 8x8帧间预测宏块分析-P
* +--------+
* | |
* | |
* | |
* +--------+
*/
x264_mb_analyse_inter_p8x8( h, &analysis );
}
}
/* Select best inter mode */
i_type = P_L0;
i_partition = D_16x16;
i_cost = analysis.l0.me16x16.cost;
//如果8x8的代价值小于16x16
//则进行8x8子块分割的处理
//处理的数据源自于l0
if( ( flags & X264_ANALYSE_PSUB16x16 ) && (!analysis.b_early_terminate ||
analysis.l0.i_cost8x8 < analysis.l0.me16x16.cost) )
{
i_type = P_8x8;
i_partition = D_8x8;
i_cost = analysis.l0.i_cost8x8;
/* Do sub 8x8 */
if( flags & X264_ANALYSE_PSUB8x8 )
{
for( int i = 0; i < 4; i++ )
{
//8x8块的子块的分析
/*
* 4x4
* +----+----+
* | | |
* +----+----+
* | | |
* +----+----+
*
*/
x264_mb_analyse_inter_p4x4( h, &analysis, i );
int i_thresh8x4 = analysis.l0.me4x4[i][1].cost_mv + analysis.l0.me4x4[i][2].cost_mv;
//如果4x4小于8x8
//则再分析8x4,4x8的代价
if( !analysis.b_early_terminate || analysis.l0.i_cost4x4[i] < analysis.l0.me8x8[i].cost + i_thresh8x4 )
{
int i_cost8x8 = analysis.l0.i_cost4x4[i];
h->mb.i_sub_partition[i] = D_L0_4x4;
/*
* 8x4
* +----+----+
* | |
* +----+----+
* | |
* +----+----+
*
*/
//如果8x4小于8x8
x264_mb_analyse_inter_p8x4( h, &analysis, i );
COPY2_IF_LT( i_cost8x8, analysis.l0.i_cost8x4[i],
h->mb.i_sub_partition[i], D_L0_8x4 );
/*
* 4x8
* +----+----+
* | | |
* + + +
* | | |
* +----+----+
*
*/
//如果4x8小于8x8
x264_mb_analyse_inter_p4x8( h, &analysis, i );
COPY2_IF_LT( i_cost8x8, analysis.l0.i_cost4x8[i],
h->mb.i_sub_partition[i], D_L0_4x8 );
i_cost += i_cost8x8 - analysis.l0.me8x8[i].cost;
}
x264_mb_cache_mv_p8x8( h, &analysis, i );
}
analysis.l0.i_cost8x8 = i_cost;
}
}
/* Now do 16x8/8x16 */
int i_thresh16x8 = analysis.l0.me8x8[1].cost_mv + analysis.l0.me8x8[2].cost_mv;
//前提要求8x8的代价值小于16x16
if( ( flags & X264_ANALYSE_PSUB16x16 ) && (!analysis.b_early_terminate ||
analysis.l0.i_cost8x8 < analysis.l0.me16x16.cost + i_thresh16x8) )
{
int i_avg_mv_ref_cost = (analysis.l0.me8x8[2].cost_mv + analysis.l0.me8x8[2].i_ref_cost
+ analysis.l0.me8x8[3].cost_mv + analysis.l0.me8x8[3].i_ref_cost + 1) >> 1;
analysis.i_cost_est16x8[1] = analysis.i_satd8x8[0][2] + analysis.i_satd8x8[0][3] + i_avg_mv_ref_cost;
/*
* 16x8 宏块划分
*
* +--------+--------+
* | | |
* | | |
* | | |
* +--------+--------+
*
*/
x264_mb_analyse_inter_p16x8( h, &analysis, i_cost );
COPY3_IF_LT( i_cost, analysis.l0.i_cost16x8, i_type, P_L0, i_partition, D_16x8 );
i_avg_mv_ref_cost = (analysis.l0.me8x8[1].cost_mv + analysis.l0.me8x8[1].i_ref_cost
+ analysis.l0.me8x8[3].cost_mv + analysis.l0.me8x8[3].i_ref_cost + 1) >> 1;
analysis.i_cost_est8x16[1] = analysis.i_satd8x8[0][1] + analysis.i_satd8x8[0][3] + i_avg_mv_ref_cost;
/*
* 8x16 宏块划分
*
* +--------+
* | |
* | |
* | |
* +--------+
* | |
* | |
* | |
* +--------+
*
*/
x264_mb_analyse_inter_p8x16( h, &analysis, i_cost );
COPY3_IF_LT( i_cost, analysis.l0.i_cost8x16, i_type, P_L0, i_partition, D_8x16 );
}
h->mb.i_partition = i_partition;
/* refine qpel */
//亚像素精度搜索
//FIXME mb_type costs?
if( analysis.i_mbrd || !h->mb.i_subpel_refine )
{
/* refine later */
}
else if( i_partition == D_16x16 )
{
x264_me_refine_qpel( h, &analysis.l0.me16x16 );
i_cost = analysis.l0.me16x16.cost;
}
else if( i_partition == D_16x8 )
{
x264_me_refine_qpel( h, &analysis.l0.me16x8[0] );
x264_me_refine_qpel( h, &analysis.l0.me16x8[1] );
i_cost = analysis.l0.me16x8[0].cost + analysis.l0.me16x8[1].cost;
}
else if( i_partition == D_8x16 )
{
x264_me_refine_qpel( h, &analysis.l0.me8x16[0] );
x264_me_refine_qpel( h, &analysis.l0.me8x16[1] );
i_cost = analysis.l0.me8x16[0].cost + analysis.l0.me8x16[1].cost;
}
else if( i_partition == D_8x8 )
{
i_cost = 0;
for( int i8x8 = 0; i8x8 < 4; i8x8++ )
{
switch( h->mb.i_sub_partition[i8x8] )
{
case D_L0_8x8:
x264_me_refine_qpel( h, &analysis.l0.me8x8[i8x8] );
i_cost += analysis.l0.me8x8[i8x8].cost;
break;
case D_L0_8x4:
x264_me_refine_qpel( h, &analysis.l0.me8x4[i8x8][0] );
x264_me_refine_qpel( h, &analysis.l0.me8x4[i8x8][1] );
i_cost += analysis.l0.me8x4[i8x8][0].cost +
analysis.l0.me8x4[i8x8][1].cost;
break;
case D_L0_4x8:
x264_me_refine_qpel( h, &analysis.l0.me4x8[i8x8][0] );
x264_me_refine_qpel( h, &analysis.l0.me4x8[i8x8][1] );
i_cost += analysis.l0.me4x8[i8x8][0].cost +
analysis.l0.me4x8[i8x8][1].cost;
break;
case D_L0_4x4:
x264_me_refine_qpel( h, &analysis.l0.me4x4[i8x8][0] );
x264_me_refine_qpel( h, &analysis.l0.me4x4[i8x8][1] );
x264_me_refine_qpel( h, &analysis.l0.me4x4[i8x8][2] );
x264_me_refine_qpel( h, &analysis.l0.me4x4[i8x8][3] );
i_cost += analysis.l0.me4x4[i8x8][0].cost +
analysis.l0.me4x4[i8x8][1].cost +
analysis.l0.me4x4[i8x8][2].cost +
analysis.l0.me4x4[i8x8][3].cost;
break;
default:
x264_log( h, X264_LOG_ERROR, "internal error (!8x8 && !4x4)\n" );
break;
}
}
}
if( h->mb.b_chroma_me )
{
if( CHROMA444 )
{
x264_mb_analyse_intra( h, &analysis, i_cost );
x264_mb_analyse_intra_chroma( h, &analysis );
}
else
{
x264_mb_analyse_intra_chroma( h, &analysis );
x264_mb_analyse_intra( h, &analysis, i_cost - analysis.i_satd_chroma );
}
analysis.i_satd_i16x16 += analysis.i_satd_chroma;
analysis.i_satd_i8x8 += analysis.i_satd_chroma;
analysis.i_satd_i4x4 += analysis.i_satd_chroma;
}
else
x264_mb_analyse_intra( h, &analysis, i_cost );//P Slice中也允许有Intra宏块,所以也要进行分析
i_satd_inter = i_cost;
i_satd_intra = X264_MIN3( analysis.i_satd_i16x16,
analysis.i_satd_i8x8,
analysis.i_satd_i4x4 );
if( analysis.i_mbrd )
{
x264_mb_analyse_p_rd( h, &analysis, X264_MIN(i_satd_inter, i_satd_intra) );
i_type = P_L0;
i_partition = D_16x16;
i_cost = analysis.l0.i_rd16x16;
COPY2_IF_LT( i_cost, analysis.l0.i_cost16x8, i_partition, D_16x8 );
COPY2_IF_LT( i_cost, analysis.l0.i_cost8x16, i_partition, D_8x16 );
COPY3_IF_LT( i_cost, analysis.l0.i_cost8x8, i_partition, D_8x8, i_type, P_8x8 );
h->mb.i_type = i_type;
h->mb.i_partition = i_partition;
if( i_cost < COST_MAX )
x264_mb_analyse_transform_rd( h, &analysis, &i_satd_inter, &i_cost );
x264_intra_rd( h, &analysis, i_satd_inter * 5/4 + 1 );
}
//获取最小的代价
COPY2_IF_LT( i_cost, analysis.i_satd_i16x16, i_type, I_16x16 );
COPY2_IF_LT( i_cost, analysis.i_satd_i8x8, i_type, I_8x8 );
COPY2_IF_LT( i_cost, analysis.i_satd_i4x4, i_type, I_4x4 );
COPY2_IF_LT( i_cost, analysis.i_satd_pcm, i_type, I_PCM );
h->mb.i_type = i_type;
if( analysis.b_force_intra && !IS_INTRA(i_type) )
{
/* Intra masking: copy fdec to fenc and re-encode the block as intra in order to make it appear as if
* it was an inter block. */
x264_analyse_update_cache( h, &analysis );
x264_macroblock_encode( h );
for( int p = 0; p < (CHROMA444 ? 3 : 1); p++ )
h->mc.copy[PIXEL_16x16]( h->mb.pic.p_fenc[p], FENC_STRIDE, h->mb.pic.p_fdec[p], FDEC_STRIDE, 16 );
if( !CHROMA444 )
{
int height = 16 >> CHROMA_V_SHIFT;
h->mc.copy[PIXEL_8x8] ( h->mb.pic.p_fenc[1], FENC_STRIDE, h->mb.pic.p_fdec[1], FDEC_STRIDE, height );
h->mc.copy[PIXEL_8x8] ( h->mb.pic.p_fenc[2], FENC_STRIDE, h->mb.pic.p_fdec[2], FDEC_STRIDE, height );
}
x264_mb_analyse_init_qp( h, &analysis, X264_MAX( h->mb.i_qp - h->mb.ip_offset, h->param.rc.i_qp_min ) );
goto intra_analysis;
}
if( analysis.i_mbrd >= 2 && h->mb.i_type != I_PCM )
{
if( IS_INTRA( h->mb.i_type ) )
{
x264_intra_rd_refine( h, &analysis );
}
else if( i_partition == D_16x16 )
{
x264_macroblock_cache_ref( h, 0, 0, 4, 4, 0, analysis.l0.me16x16.i_ref );
analysis.l0.me16x16.cost = i_cost;
x264_me_refine_qpel_rd( h, &analysis.l0.me16x16, analysis.i_lambda2, 0, 0 );
}
else if( i_partition == D_16x8 )
{
h->mb.i_sub_partition[0] = h->mb.i_sub_partition[1] =
h->mb.i_sub_partition[2] = h->mb.i_sub_partition[3] = D_L0_8x8;
x264_macroblock_cache_ref( h, 0, 0, 4, 2, 0, analysis.l0.me16x8[0].i_ref );
x264_macroblock_cache_ref( h, 0, 2, 4, 2, 0, analysis.l0.me16x8[1].i_ref );
x264_me_refine_qpel_rd( h, &analysis.l0.me16x8[0], analysis.i_lambda2, 0, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me16x8[1], analysis.i_lambda2, 8, 0 );
}
else if( i_partition == D_8x16 )
{
h->mb.i_sub_partition[0] = h->mb.i_sub_partition[1] =
h->mb.i_sub_partition[2] = h->mb.i_sub_partition[3] = D_L0_8x8;
x264_macroblock_cache_ref( h, 0, 0, 2, 4, 0, analysis.l0.me8x16[0].i_ref );
x264_macroblock_cache_ref( h, 2, 0, 2, 4, 0, analysis.l0.me8x16[1].i_ref );
x264_me_refine_qpel_rd( h, &analysis.l0.me8x16[0], analysis.i_lambda2, 0, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me8x16[1], analysis.i_lambda2, 4, 0 );
}
else if( i_partition == D_8x8 )
{
x264_analyse_update_cache( h, &analysis );
for( int i8x8 = 0; i8x8 < 4; i8x8++ )
{
if( h->mb.i_sub_partition[i8x8] == D_L0_8x8 )
{
x264_me_refine_qpel_rd( h, &analysis.l0.me8x8[i8x8], analysis.i_lambda2, i8x8*4, 0 );
}
else if( h->mb.i_sub_partition[i8x8] == D_L0_8x4 )
{
x264_me_refine_qpel_rd( h, &analysis.l0.me8x4[i8x8][0], analysis.i_lambda2, i8x8*4+0, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me8x4[i8x8][1], analysis.i_lambda2, i8x8*4+2, 0 );
}
else if( h->mb.i_sub_partition[i8x8] == D_L0_4x8 )
{
x264_me_refine_qpel_rd( h, &analysis.l0.me4x8[i8x8][0], analysis.i_lambda2, i8x8*4+0, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me4x8[i8x8][1], analysis.i_lambda2, i8x8*4+1, 0 );
}
else if( h->mb.i_sub_partition[i8x8] == D_L0_4x4 )
{
x264_me_refine_qpel_rd( h, &analysis.l0.me4x4[i8x8][0], analysis.i_lambda2, i8x8*4+0, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me4x4[i8x8][1], analysis.i_lambda2, i8x8*4+1, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me4x4[i8x8][2], analysis.i_lambda2, i8x8*4+2, 0 );
x264_me_refine_qpel_rd( h, &analysis.l0.me4x4[i8x8][3], analysis.i_lambda2, i8x8*4+3, 0 );
}
}
}
}
}
}
else if( h->sh.i_type == SLICE_TYPE_B )//B Slice的时候
{
int i_bskip_cost = COST_MAX;
int b_skip = 0;
if( analysis.i_mbrd )
x264_mb_init_fenc_cache( h, analysis.i_mbrd >= 2 );
h->mb.i_type = B_SKIP;
if( h->mb.b_direct_auto_write )
{
/* direct=auto heuristic: prefer whichever mode allows more Skip macroblocks */
for( int i = 0; i < 2; i++ )
{
int b_changed = 1;
h->sh.b_direct_spatial_mv_pred ^= 1;
analysis.b_direct_available = x264_mb_predict_mv_direct16x16( h, i && analysis.b_direct_available ? &b_changed : NULL );
if( analysis.b_direct_available )
{
if( b_changed )
{
x264_mb_mc( h );
b_skip = x264_macroblock_probe_bskip( h );
}
h->stat.frame.i_direct_score[ h->sh.b_direct_spatial_mv_pred ] += b_skip;
}
else
b_skip = 0;
}
}
else
analysis.b_direct_available = x264_mb_predict_mv_direct16x16( h, NULL );
analysis.b_try_skip = 0;
if( analysis.b_direct_available )
{
if( !h->mb.b_direct_auto_write )
x264_mb_mc( h );
/* If the current macroblock is off the frame, just skip it. */
if( HAVE_INTERLACED && !MB_INTERLACED && h->mb.i_mb_y * 16 >= h->param.i_height )
b_skip = 1;
else if( analysis.i_mbrd )
{
i_bskip_cost = ssd_mb( h );
/* 6 = minimum cavlc cost of a non-skipped MB */
b_skip = h->mb.b_skip_mc = i_bskip_cost <= ((6 * analysis.i_lambda2 + 128) >> 8);
}
else if( !h->mb.b_direct_auto_write )
{
/* Conditioning the probe on neighboring block types
* doesn't seem to help speed or quality. */
analysis.b_try_skip = x264_macroblock_probe_bskip( h );
if( h->param.analyse.i_subpel_refine < 3 )
b_skip = analysis.b_try_skip;
}
/* Set up MVs for future predictors */
if( b_skip )
{
for( int i = 0; i < h->mb.pic.i_fref[0]; i++ )
M32( h->mb.mvr[0][i][h->mb.i_mb_xy] ) = 0;
for( int i = 0; i < h->mb.pic.i_fref[1]; i++ )
M32( h->mb.mvr[1][i][h->mb.i_mb_xy] ) = 0;
}
}
if( !b_skip )
{
const unsigned int flags = h->param.analyse.inter;
int i_type;
int i_partition;
int i_satd_inter;
h->mb.b_skip_mc = 0;
h->mb.i_type = B_DIRECT;
x264_mb_analyse_load_costs( h, &analysis );
/* select best inter mode */
/* direct must be first */
if( analysis.b_direct_available )
x264_mb_analyse_inter_direct( h, &analysis );
/*
* 16x16 帧间预测宏块分析-B
*
* +--------+--------+
* | |
* | |
* | |
* + + +
* | |
* | |
* | |
* +--------+--------+
*
*/
x264_mb_analyse_inter_b16x16( h, &analysis );
if( h->mb.i_type == B_SKIP )
{
for( int i = 1; i < h->mb.pic.i_fref[0]; i++ )
M32( h->mb.mvr[0][i][h->mb.i_mb_xy] ) = 0;
for( int i = 1; i < h->mb.pic.i_fref[1]; i++ )
M32( h->mb.mvr[1][i][h->mb.i_mb_xy] ) = 0;
return;
}
i_type = B_L0_L0;
i_partition = D_16x16;
i_cost = analysis.l0.me16x16.cost;
COPY2_IF_LT( i_cost, analysis.l1.me16x16.cost, i_type, B_L1_L1 );
COPY2_IF_LT( i_cost, analysis.i_cost16x16bi, i_type, B_BI_BI );
COPY2_IF_LT( i_cost, analysis.i_cost16x16direct, i_type, B_DIRECT );
if( analysis.i_mbrd && analysis.b_early_terminate && analysis.i_cost16x16direct <= i_cost * 33/32 )
{
x264_mb_analyse_b_rd( h, &analysis, i_cost );
if( i_bskip_cost < analysis.i_rd16x16direct &&
i_bskip_cost < analysis.i_rd16x16bi &&
i_bskip_cost < analysis.l0.i_rd16x16 &&
i_bskip_cost < analysis.l1.i_rd16x16 )
{
h->mb.i_type = B_SKIP;
x264_analyse_update_cache( h, &analysis );
return;
}
}
if( flags & X264_ANALYSE_BSUB16x16 )
{
/*
* 8x8 帧间预测宏块分析-B
* +--------+
* | |
* | |
* | |
* +--------+
*
*/
if( h->param.analyse.b_mixed_references )
x264_mb_analyse_inter_b8x8_mixed_ref( h, &analysis );
else
x264_mb_analyse_inter_b8x8( h, &analysis );
COPY3_IF_LT( i_cost, analysis.i_cost8x8bi, i_type, B_8x8, i_partition, D_8x8 );
/* Try to estimate the cost of b16x8/b8x16 based on the satd scores of the b8x8 modes */
int i_cost_est16x8bi_total = 0, i_cost_est8x16bi_total = 0;
int i_mb_type, i_partition16x8[2], i_partition8x16[2];
for( int i = 0; i < 2; i++ )
{
int avg_l0_mv_ref_cost, avg_l1_mv_ref_cost;
int i_l0_satd, i_l1_satd, i_bi_satd, i_best_cost;
// 16x8
i_best_cost = COST_MAX;
i_l0_satd = analysis.i_satd8x8[0][i*2] + analysis.i_satd8x8[0][i*2+1];
i_l1_satd = analysis.i_satd8x8[1][i*2] + analysis.i_satd8x8[1][i*2+1];
i_bi_satd = analysis.i_satd8x8[2][i*2] + analysis.i_satd8x8[2][i*2+1];
avg_l0_mv_ref_cost = ( analysis.l0.me8x8[i*2].cost_mv + analysis.l0.me8x8[i*2].i_ref_cost
+ analysis.l0.me8x8[i*2+1].cost_mv + analysis.l0.me8x8[i*2+1].i_ref_cost + 1 ) >> 1;
avg_l1_mv_ref_cost = ( analysis.l1.me8x8[i*2].cost_mv + analysis.l1.me8x8[i*2].i_ref_cost
+ analysis.l1.me8x8[i*2+1].cost_mv + analysis.l1.me8x8[i*2+1].i_ref_cost + 1 ) >> 1;
COPY2_IF_LT( i_best_cost, i_l0_satd + avg_l0_mv_ref_cost, i_partition16x8[i], D_L0_8x8 );
COPY2_IF_LT( i_best_cost, i_l1_satd + avg_l1_mv_ref_cost, i_partition16x8[i], D_L1_8x8 );
COPY2_IF_LT( i_best_cost, i_bi_satd + avg_l0_mv_ref_cost + avg_l1_mv_ref_cost, i_partition16x8[i], D_BI_8x8 );
analysis.i_cost_est16x8[i] = i_best_cost;
// 8x16
i_best_cost = COST_MAX;
i_l0_satd = analysis.i_satd8x8[0][i] + analysis.i_satd8x8[0][i+2];
i_l1_satd = analysis.i_satd8x8[1][i] + analysis.i_satd8x8[1][i+2];
i_bi_satd = analysis.i_satd8x8[2][i] + analysis.i_satd8x8[2][i+2];
avg_l0_mv_ref_cost = ( analysis.l0.me8x8[i].cost_mv + analysis.l0.me8x8[i].i_ref_cost
+ analysis.l0.me8x8[i+2].cost_mv + analysis.l0.me8x8[i+2].i_ref_cost + 1 ) >> 1;
avg_l1_mv_ref_cost = ( analysis.l1.me8x8[i].cost_mv + analysis.l1.me8x8[i].i_ref_cost
+ analysis.l1.me8x8[i+2].cost_mv + analysis.l1.me8x8[i+2].i_ref_cost + 1 ) >> 1;
COPY2_IF_LT( i_best_cost, i_l0_satd + avg_l0_mv_ref_cost, i_partition8x16[i], D_L0_8x8 );
COPY2_IF_LT( i_best_cost, i_l1_satd + avg_l1_mv_ref_cost, i_partition8x16[i], D_L1_8x8 );
COPY2_IF_LT( i_best_cost, i_bi_satd + avg_l0_mv_ref_cost + avg_l1_mv_ref_cost, i_partition8x16[i], D_BI_8x8 );
analysis.i_cost_est8x16[i] = i_best_cost;
}
i_mb_type = B_L0_L0 + (i_partition16x8[0]>>2) * 3 + (i_partition16x8[1]>>2);
analysis.i_cost_est16x8[1] += analysis.i_lambda * i_mb_b16x8_cost_table[i_mb_type];
i_cost_est16x8bi_total = analysis.i_cost_est16x8[0] + analysis.i_cost_est16x8[1];
i_mb_type = B_L0_L0 + (i_partition8x16[0]>>2) * 3 + (i_partition8x16[1]>>2);
analysis.i_cost_est8x16[1] += analysis.i_lambda * i_mb_b16x8_cost_table[i_mb_type];
i_cost_est8x16bi_total = analysis.i_cost_est8x16[0] + analysis.i_cost_est8x16[1];
/* We can gain a little speed by checking the mode with the lowest estimated cost first */
int try_16x8_first = i_cost_est16x8bi_total < i_cost_est8x16bi_total;
if( try_16x8_first && (!analysis.b_early_terminate || i_cost_est16x8bi_total < i_cost) )
{
x264_mb_analyse_inter_b16x8( h, &analysis, i_cost );
COPY3_IF_LT( i_cost, analysis.i_cost16x8bi, i_type, analysis.i_mb_type16x8, i_partition, D_16x8 );
}
if( !analysis.b_early_terminate || i_cost_est8x16bi_total < i_cost )
{
x264_mb_analyse_inter_b8x16( h, &analysis, i_cost );
COPY3_IF_LT( i_cost, analysis.i_cost8x16bi, i_type, analysis.i_mb_type8x16, i_partition, D_8x16 );
}
if( !try_16x8_first && (!analysis.b_early_terminate || i_cost_est16x8bi_total < i_cost) )
{
x264_mb_analyse_inter_b16x8( h, &analysis, i_cost );
COPY3_IF_LT( i_cost, analysis.i_cost16x8bi, i_type, analysis.i_mb_type16x8, i_partition, D_16x8 );
}
}
if( analysis.i_mbrd || !h->mb.i_subpel_refine )
{
/* refine later */
}
/* refine qpel */
else if( i_partition == D_16x16 )
{
analysis.l0.me16x16.cost -= analysis.i_lambda * i_mb_b_cost_table[B_L0_L0];
analysis.l1.me16x16.cost -= analysis.i_lambda * i_mb_b_cost_table[B_L1_L1];
if( i_type == B_L0_L0 )
{
x264_me_refine_qpel( h, &analysis.l0.me16x16 );
i_cost = analysis.l0.me16x16.cost
+ analysis.i_lambda * i_mb_b_cost_table[B_L0_L0];
}
else if( i_type == B_L1_L1 )
{
x264_me_refine_qpel( h, &analysis.l1.me16x16 );
i_cost = analysis.l1.me16x16.cost
+ analysis.i_lambda * i_mb_b_cost_table[B_L1_L1];
}
else if( i_type == B_BI_BI )
{
x264_me_refine_qpel( h, &analysis.l0.bi16x16 );
x264_me_refine_qpel( h, &analysis.l1.bi16x16 );
}
}
else if( i_partition == D_16x8 )
{
for( int i = 0; i < 2; i++ )
{
if( analysis.i_mb_partition16x8[i] != D_L1_8x8 )
x264_me_refine_qpel( h, &analysis.l0.me16x8[i] );
if( analysis.i_mb_partition16x8[i] != D_L0_8x8 )
x264_me_refine_qpel( h, &analysis.l1.me16x8[i] );
}
}
else if( i_partition == D_8x16 )
{
for( int i = 0; i < 2; i++ )
{
if( analysis.i_mb_partition8x16[i] != D_L1_8x8 )
x264_me_refine_qpel( h, &analysis.l0.me8x16[i] );
if( analysis.i_mb_partition8x16[i] != D_L0_8x8 )
x264_me_refine_qpel( h, &analysis.l1.me8x16[i] );
}
}
else if( i_partition == D_8x8 )
{
for( int i = 0; i < 4; i++ )
{
x264_me_t *m;
int i_part_cost_old;
int i_type_cost;
int i_part_type = h->mb.i_sub_partition[i];
int b_bidir = (i_part_type == D_BI_8x8);
if( i_part_type == D_DIRECT_8x8 )
continue;
if( x264_mb_partition_listX_table[0][i_part_type] )
{
m = &analysis.l0.me8x8[i];
i_part_cost_old = m->cost;
i_type_cost = analysis.i_lambda * i_sub_mb_b_cost_table[D_L0_8x8];
m->cost -= i_type_cost;
x264_me_refine_qpel( h, m );
if( !b_bidir )
analysis.i_cost8x8bi += m->cost + i_type_cost - i_part_cost_old;
}
if( x264_mb_partition_listX_table[1][i_part_type] )
{
m = &analysis.l1.me8x8[i];
i_part_cost_old = m->cost;
i_type_cost = analysis.i_lambda * i_sub_mb_b_cost_table[D_L1_8x8];
m->cost -= i_type_cost;
x264_me_refine_qpel( h, m );
if( !b_bidir )
analysis.i_cost8x8bi += m->cost + i_type_cost - i_part_cost_old;
}
/* TODO: update mvp? */
}
}
i_satd_inter = i_cost;
if( analysis.i_mbrd )
{
x264_mb_analyse_b_rd( h, &analysis, i_satd_inter );
i_type = B_SKIP;
i_cost = i_bskip_cost;
i_partition = D_16x16;
COPY2_IF_LT( i_cost, analysis.l0.i_rd16x16, i_type, B_L0_L0 );
COPY2_IF_LT( i_cost, analysis.l1.i_rd16x16, i_type, B_L1_L1 );
COPY2_IF_LT( i_cost, analysis.i_rd16x16bi, i_type, B_BI_BI );
COPY2_IF_LT( i_cost, analysis.i_rd16x16direct, i_type, B_DIRECT );
COPY3_IF_LT( i_cost, analysis.i_rd16x8bi, i_type, analysis.i_mb_type16x8, i_partition, D_16x8 );
COPY3_IF_LT( i_cost, analysis.i_rd8x16bi, i_type, analysis.i_mb_type8x16, i_partition, D_8x16 );
COPY3_IF_LT( i_cost, analysis.i_rd8x8bi, i_type, B_8x8, i_partition, D_8x8 );
h->mb.i_type = i_type;
h->mb.i_partition = i_partition;
}
if( h->mb.b_chroma_me )
{
if( CHROMA444 )
{
x264_mb_analyse_intra( h, &analysis, i_satd_inter );
x264_mb_analyse_intra_chroma( h, &analysis );
}
else
{
x264_mb_analyse_intra_chroma( h, &analysis );
x264_mb_analyse_intra( h, &analysis, i_satd_inter - analysis.i_satd_chroma );
}
analysis.i_satd_i16x16 += analysis.i_satd_chroma;
analysis.i_satd_i8x8 += analysis.i_satd_chroma;
analysis.i_satd_i4x4 += analysis.i_satd_chroma;
}
else
x264_mb_analyse_intra( h, &analysis, i_satd_inter );
if( analysis.i_mbrd )
{
x264_mb_analyse_transform_rd( h, &analysis, &i_satd_inter, &i_cost );
x264_intra_rd( h, &analysis, i_satd_inter * 17/16 + 1 );
}
COPY2_IF_LT( i_cost, analysis.i_satd_i16x16, i_type, I_16x16 );
COPY2_IF_LT( i_cost, analysis.i_satd_i8x8, i_type, I_8x8 );
COPY2_IF_LT( i_cost, analysis.i_satd_i4x4, i_type, I_4x4 );
COPY2_IF_LT( i_cost, analysis.i_satd_pcm, i_type, I_PCM );
h->mb.i_type = i_type;
h->mb.i_partition = i_partition;
if( analysis.i_mbrd >= 2 && IS_INTRA( i_type ) && i_type != I_PCM )
x264_intra_rd_refine( h, &analysis );
if( h->mb.i_subpel_refine >= 5 )
x264_refine_bidir( h, &analysis );
if( analysis.i_mbrd >= 2 && i_type > B_DIRECT && i_type < B_SKIP )
{
int i_biweight;
x264_analyse_update_cache( h, &analysis );
if( i_partition == D_16x16 )
{
if( i_type == B_L0_L0 )
{
analysis.l0.me16x16.cost = i_cost;
x264_me_refine_qpel_rd( h, &analysis.l0.me16x16, analysis.i_lambda2, 0, 0 );
}
else if( i_type == B_L1_L1 )
{
analysis.l1.me16x16.cost = i_cost;
x264_me_refine_qpel_rd( h, &analysis.l1.me16x16, analysis.i_lambda2, 0, 1 );
}
else if( i_type == B_BI_BI )
{
i_biweight = h->mb.bipred_weight[analysis.l0.bi16x16.i_ref][analysis.l1.bi16x16.i_ref];
x264_me_refine_bidir_rd( h, &analysis.l0.bi16x16, &analysis.l1.bi16x16, i_biweight, 0, analysis.i_lambda2 );
}
}
else if( i_partition == D_16x8 )
{
for( int i = 0; i < 2; i++ )
{
h->mb.i_sub_partition[i*2] = h->mb.i_sub_partition[i*2+1] = analysis.i_mb_partition16x8[i];
if( analysis.i_mb_partition16x8[i] == D_L0_8x8 )
x264_me_refine_qpel_rd( h, &analysis.l0.me16x8[i], analysis.i_lambda2, i*8, 0 );
else if( analysis.i_mb_partition16x8[i] == D_L1_8x8 )
x264_me_refine_qpel_rd( h, &analysis.l1.me16x8[i], analysis.i_lambda2, i*8, 1 );
else if( analysis.i_mb_partition16x8[i] == D_BI_8x8 )
{
i_biweight = h->mb.bipred_weight[analysis.l0.me16x8[i].i_ref][analysis.l1.me16x8[i].i_ref];
x264_me_refine_bidir_rd( h, &analysis.l0.me16x8[i], &analysis.l1.me16x8[i], i_biweight, i*2, analysis.i_lambda2 );
}
}
}
else if( i_partition == D_8x16 )
{
for( int i = 0; i < 2; i++ )
{
h->mb.i_sub_partition[i] = h->mb.i_sub_partition[i+2] = analysis.i_mb_partition8x16[i];
if( analysis.i_mb_partition8x16[i] == D_L0_8x8 )
x264_me_refine_qpel_rd( h, &analysis.l0.me8x16[i], analysis.i_lambda2, i*4, 0 );
else if( analysis.i_mb_partition8x16[i] == D_L1_8x8 )
x264_me_refine_qpel_rd( h, &analysis.l1.me8x16[i], analysis.i_lambda2, i*4, 1 );
else if( analysis.i_mb_partition8x16[i] == D_BI_8x8 )
{
i_biweight = h->mb.bipred_weight[analysis.l0.me8x16[i].i_ref][analysis.l1.me8x16[i].i_ref];
x264_me_refine_bidir_rd( h, &analysis.l0.me8x16[i], &analysis.l1.me8x16[i], i_biweight, i, analysis.i_lambda2 );
}
}
}
else if( i_partition == D_8x8 )
{
for( int i = 0; i < 4; i++ )
{
if( h->mb.i_sub_partition[i] == D_L0_8x8 )
x264_me_refine_qpel_rd( h, &analysis.l0.me8x8[i], analysis.i_lambda2, i*4, 0 );
else if( h->mb.i_sub_partition[i] == D_L1_8x8 )
x264_me_refine_qpel_rd( h, &analysis.l1.me8x8[i], analysis.i_lambda2, i*4, 1 );
else if( h->mb.i_sub_partition[i] == D_BI_8x8 )
{
i_biweight = h->mb.bipred_weight[analysis.l0.me8x8[i].i_ref][analysis.l1.me8x8[i].i_ref];
x264_me_refine_bidir_rd( h, &analysis.l0.me8x8[i], &analysis.l1.me8x8[i], i_biweight, i, analysis.i_lambda2 );
}
}
}
}
}
}
x264_analyse_update_cache( h, &analysis );
/* In rare cases we can end up qpel-RDing our way back to a larger partition size
* without realizing it. Check for this and account for it if necessary. */
if( analysis.i_mbrd >= 2 )
{
/* Don't bother with bipred or 8x8-and-below, the odds are incredibly low. */
static const uint8_t check_mv_lists[X264_MBTYPE_MAX] = {[P_L0]=1, [B_L0_L0]=1, [B_L1_L1]=2};
int list = check_mv_lists[h->mb.i_type] - 1;
if( list >= 0 && h->mb.i_partition != D_16x16 &&
M32( &h->mb.cache.mv[list][x264_scan8[0]] ) == M32( &h->mb.cache.mv[list][x264_scan8[12]] ) &&
h->mb.cache.ref[list][x264_scan8[0]] == h->mb.cache.ref[list][x264_scan8[12]] )
h->mb.i_partition = D_16x16;
}
if( !analysis.i_mbrd )
x264_mb_analyse_transform( h );
if( analysis.i_mbrd == 3 && !IS_SKIP(h->mb.i_type) )
x264_mb_analyse_qp_rd( h, &analysis );
h->mb.b_trellis = h->param.analyse.i_trellis;
h->mb.b_noise_reduction = h->mb.b_noise_reduction || (!!h->param.analyse.i_noise_reduction && !IS_INTRA( h->mb.i_type ));
if( !IS_SKIP(h->mb.i_type) && h->mb.i_psy_trellis && h->param.analyse.i_trellis == 1 )
x264_psy_trellis_init( h, 0 );
if( h->mb.b_trellis == 1 || h->mb.b_noise_reduction )
h->mb.i_skip_intra = 0;
}
尽管x264_macroblock_analyse()的源代码比较长,但是它的逻辑比较清晰,如下所示:
(1)如果当前是I Slice,调用x264_mb_analyse_intra()进行Intra宏块的帧内预测模式分析。
(2)如果当前是P Slice,则进行下面流程的分析:a)调用x264_macroblock_probe_pskip()分析是否为Skip宏块,如果是的话则不再进行下面分析。b)调用x264_mb_analyse_inter_p16x16()分析P16x16帧间预测的代价。c)调用x264_mb_analyse_inter_p8x8()分析P8x8帧间预测的代价。d)如果P8x8代价值小于P16x16,则依次对4个8x8的子宏块分割进行判断:i.调用x264_mb_analyse_inter_p4x4()分析P4x4帧间预测的代价。ii.如果P4x4代价值小于P8x8,则调用 x264_mb_analyse_inter_p8x4()和x264_mb_analyse_inter_p4x8()分析P8x4和P4x8帧间预测的代价。e)如果P8x8代价值小于P16x16,调用x264_mb_analyse_inter_p16x8()和x264_mb_analyse_inter_p8x16()分析P16x8和P8x16帧间预测的代价。f)此外还要调用x264_mb_analyse_intra(),检查当前宏块作为Intra宏块编码的代价是否小于作为P宏块编码的代价(P Slice中也允许有Intra宏块)。(3)如果当前是B Slice,则进行和P Slice类似的处理。
本文记录这一流程中Intra宏块的帧内预测模式分析函数x264_mb_analyse_intra()。
x264_mb_analyse_intra()
x264_mb_analyse_intra()用于对Intra宏块进行帧内预测模式的分析。该函数的定义位于encoder\analyse.c,如下所示。//帧内预测分析-从16x16的SAD,4个8x8的SAD和,16个4x4SAD中选出最优方式
static void x264_mb_analyse_intra( x264_t *h, x264_mb_analysis_t *a, int i_satd_inter )
{
const unsigned int flags = h->sh.i_type == SLICE_TYPE_I ? h->param.analyse.intra : h->param.analyse.inter;
//计算
//p_fenc是编码帧
pixel *p_src = h->mb.pic.p_fenc[0];
//p_fdec是重建帧
pixel *p_dst = h->mb.pic.p_fdec[0];
static const int8_t intra_analysis_shortcut[2][2][2][5] =
{
{{{I_PRED_4x4_HU, -1, -1, -1, -1},
{I_PRED_4x4_DDL, I_PRED_4x4_VL, -1, -1, -1}},
{{I_PRED_4x4_DDR, I_PRED_4x4_HD, I_PRED_4x4_HU, -1, -1},
{I_PRED_4x4_DDL, I_PRED_4x4_DDR, I_PRED_4x4_VR, I_PRED_4x4_VL, -1}}},
{{{I_PRED_4x4_HU, -1, -1, -1, -1},
{-1, -1, -1, -1, -1}},
{{I_PRED_4x4_DDR, I_PRED_4x4_HD, I_PRED_4x4_HU, -1, -1},
{I_PRED_4x4_DDR, I_PRED_4x4_VR, -1, -1, -1}}},
};
int idx;
int lambda = a->i_lambda;
/*---------------- Try all mode and calculate their score ---------------*/
/* Disabled i16x16 for AVC-Intra compat */
//帧内16x16
if( !h->param.i_avcintra_class )
{
//获得可用的帧内预测模式-针对帧内16x16
/*
* 16x16块
*
* +--------+--------+
* | |
* | |
* | |
* + + +
* | |
* | |
* | |
* +--------+--------+
*
*/
//左侧是否有可用数据?上方是否有可用数据?
const int8_t *predict_mode = predict_16x16_mode_available( h->mb.i_neighbour_intra );
/* Not heavily tuned */
static const uint8_t i16x16_thresh_lut[11] = { 2, 2, 2, 3, 3, 4, 4, 4, 4, 4, 4 };
int i16x16_thresh = a->b_fast_intra ? (i16x16_thresh_lut[h->mb.i_subpel_refine]*i_satd_inter)>>1 : COST_MAX;
if( !h->mb.b_lossless && predict_mode[3] >= 0 )
{
h->pixf.intra_mbcmp_x3_16x16( p_src, p_dst, a->i_satd_i16x16_dir );
a->i_satd_i16x16_dir[0] += lambda * bs_size_ue(0);
a->i_satd_i16x16_dir[1] += lambda * bs_size_ue(1);
a->i_satd_i16x16_dir[2] += lambda * bs_size_ue(2);
COPY2_IF_LT( a->i_satd_i16x16, a->i_satd_i16x16_dir[0], a->i_predict16x16, 0 );
COPY2_IF_LT( a->i_satd_i16x16, a->i_satd_i16x16_dir[1], a->i_predict16x16, 1 );
COPY2_IF_LT( a->i_satd_i16x16, a->i_satd_i16x16_dir[2], a->i_predict16x16, 2 );
/* Plane is expensive, so don't check it unless one of the previous modes was useful. */
if( a->i_satd_i16x16 <= i16x16_thresh )
{
h->predict_16x16[I_PRED_16x16_P]( p_dst );
a->i_satd_i16x16_dir[I_PRED_16x16_P] = h->pixf.mbcmp[PIXEL_16x16]( p_dst, FDEC_STRIDE, p_src, FENC_STRIDE );
a->i_satd_i16x16_dir[I_PRED_16x16_P] += lambda * bs_size_ue(3);
COPY2_IF_LT( a->i_satd_i16x16, a->i_satd_i16x16_dir[I_PRED_16x16_P], a->i_predict16x16, 3 );
}
}
else
{
//遍历所有的可用的Intra16x16帧内预测模式
//最多4种
for( ; *predict_mode >= 0; predict_mode++ )
{
int i_satd;
int i_mode = *predict_mode;
//帧内预测汇编函数:根据左边和上边的像素计算出预测值
/*
* 帧内预测举例
* Vertical预测方式
* |X1 X2 ... X16
* --+---------------
* |X1 X2 ... X16
* |X1 X2 ... X16
* |.. .. ... X16
* |X1 X2 ... X16
*
* Horizontal预测方式
* |
* --+---------------
* X1| X1 X1 ... X1
* X2| X2 X2 ... X2
* ..| .. .. ... ..
* X16|X16 X16 ... X16
*
* DC预测方式
* |X1 X2 ... X16
* --+---------------
* X17|
* X18| Y
* ..|
* X32|
*
* Y=(X1+X2+X3+X4+...+X31+X32)/32
*
*/
if( h->mb.b_lossless )
x264_predict_lossless_16x16( h, 0, i_mode );
else
h->predict_16x16[i_mode]( p_dst );//计算结果存储在p_dst重建帧中
//计算SAD或者是SATD(SATD(transformed)是经过Hadamard变换之后的SAD)
//即编码代价
//数据位于p_dst和p_src
i_satd = h->pixf.mbcmp[PIXEL_16x16]( p_dst, FDEC_STRIDE, p_src, FENC_STRIDE ) +
lambda * bs_size_ue( x264_mb_pred_mode16x16_fix[i_mode] );
//COPY2_IF_LT()函数的意思是“copy if little”。即如果值更小(代价更小),就拷贝。
//宏定义展开后如下所示
//if((i_satd)<(a->i_satd_i16x16))
//{
// (a->i_satd_i16x16)=(i_satd);
// (a->i_predict16x16)=(i_mode);
//}
COPY2_IF_LT( a->i_satd_i16x16, i_satd, a->i_predict16x16, i_mode );
//每种模式的代价都会存储
a->i_satd_i16x16_dir[i_mode] = i_satd;
}
}
if( h->sh.i_type == SLICE_TYPE_B )
/* cavlc mb type prefix */
a->i_satd_i16x16 += lambda * i_mb_b_cost_table[I_16x16];
if( a->i_satd_i16x16 > i16x16_thresh )
return;
}
uint16_t *cost_i4x4_mode = (uint16_t*)ALIGN((intptr_t)x264_cost_i4x4_mode,64) + a->i_qp*32 + 8;
/* 8x8 prediction selection */
//帧内8x8(没研究过)
if( flags & X264_ANALYSE_I8x8 )
{
ALIGNED_ARRAY_32( pixel, edge,[36] );
x264_pixel_cmp_t sa8d = (h->pixf.mbcmp[0] == h->pixf.satd[0]) ? h->pixf.sa8d[PIXEL_8x8] : h->pixf.mbcmp[PIXEL_8x8];
int i_satd_thresh = a->i_mbrd ? COST_MAX : X264_MIN( i_satd_inter, a->i_satd_i16x16 );
// FIXME some bias like in i4x4?
int i_cost = lambda * 4; /* base predmode costs */
h->mb.i_cbp_luma = 0;
if( h->sh.i_type == SLICE_TYPE_B )
i_cost += lambda * i_mb_b_cost_table[I_8x8];
for( idx = 0;; idx++ )
{
int x = idx&1;
int y = idx>>1;
pixel *p_src_by = p_src + 8*x + 8*y*FENC_STRIDE;
pixel *p_dst_by = p_dst + 8*x + 8*y*FDEC_STRIDE;
int i_best = COST_MAX;
int i_pred_mode = x264_mb_predict_intra4x4_mode( h, 4*idx );
const int8_t *predict_mode = predict_8x8_mode_available( a->b_avoid_topright, h->mb.i_neighbour8[idx], idx );
h->predict_8x8_filter( p_dst_by, edge, h->mb.i_neighbour8[idx], ALL_NEIGHBORS );
if( h->pixf.intra_mbcmp_x9_8x8 && predict_mode[8] >= 0 )
{
/* No shortcuts here. The SSSE3 implementation of intra_mbcmp_x9 is fast enough. */
i_best = h->pixf.intra_mbcmp_x9_8x8( p_src_by, p_dst_by, edge, cost_i4x4_mode-i_pred_mode, a->i_satd_i8x8_dir[idx] );
i_cost += i_best & 0xffff;
i_best >>= 16;
a->i_predict8x8[idx] = i_best;
if( idx == 3 || i_cost > i_satd_thresh )
break;
x264_macroblock_cache_intra8x8_pred( h, 2*x, 2*y, i_best );
}
else
{
if( !h->mb.b_lossless && predict_mode[5] >= 0 )
{
ALIGNED_ARRAY_16( int32_t, satd,[9] );
h->pixf.intra_mbcmp_x3_8x8( p_src_by, edge, satd );
int favor_vertical = satd[I_PRED_4x4_H] > satd[I_PRED_4x4_V];
satd[i_pred_mode] -= 3 * lambda;
for( int i = 2; i >= 0; i-- )
{
int cost = satd[i];
a->i_satd_i8x8_dir[idx][i] = cost + 4 * lambda;
COPY2_IF_LT( i_best, cost, a->i_predict8x8[idx], i );
}
/* Take analysis shortcuts: don't analyse modes that are too
* far away direction-wise from the favored mode. */
if( a->i_mbrd < 1 + a->b_fast_intra )
predict_mode = intra_analysis_shortcut[a->b_avoid_topright][predict_mode[8] >= 0][favor_vertical];
else
predict_mode += 3;
}
for( ; *predict_mode >= 0 && (i_best >= 0 || a->i_mbrd >= 2); predict_mode++ )
{
int i_satd;
int i_mode = *predict_mode;
if( h->mb.b_lossless )
x264_predict_lossless_8x8( h, p_dst_by, 0, idx, i_mode, edge );
else
h->predict_8x8[i_mode]( p_dst_by, edge );
i_satd = sa8d( p_dst_by, FDEC_STRIDE, p_src_by, FENC_STRIDE );
if( i_pred_mode == x264_mb_pred_mode4x4_fix(i_mode) )
i_satd -= 3 * lambda;
COPY2_IF_LT( i_best, i_satd, a->i_predict8x8[idx], i_mode );
a->i_satd_i8x8_dir[idx][i_mode] = i_satd + 4 * lambda;
}
i_cost += i_best + 3*lambda;
if( idx == 3 || i_cost > i_satd_thresh )
break;
if( h->mb.b_lossless )
x264_predict_lossless_8x8( h, p_dst_by, 0, idx, a->i_predict8x8[idx], edge );
else
h->predict_8x8[a->i_predict8x8[idx]]( p_dst_by, edge );
x264_macroblock_cache_intra8x8_pred( h, 2*x, 2*y, a->i_predict8x8[idx] );
}
/* we need to encode this block now (for next ones) */
x264_mb_encode_i8x8( h, 0, idx, a->i_qp, a->i_predict8x8[idx], edge, 0 );
}
if( idx == 3 )
{
a->i_satd_i8x8 = i_cost;
if( h->mb.i_skip_intra )
{
h->mc.copy[PIXEL_16x16]( h->mb.pic.i8x8_fdec_buf, 16, p_dst, FDEC_STRIDE, 16 );
h->mb.pic.i8x8_nnz_buf[0] = M32( &h->mb.cache.non_zero_count[x264_scan8[ 0]] );
h->mb.pic.i8x8_nnz_buf[1] = M32( &h->mb.cache.non_zero_count[x264_scan8[ 2]] );
h->mb.pic.i8x8_nnz_buf[2] = M32( &h->mb.cache.non_zero_count[x264_scan8[ 8]] );
h->mb.pic.i8x8_nnz_buf[3] = M32( &h->mb.cache.non_zero_count[x264_scan8[10]] );
h->mb.pic.i8x8_cbp = h->mb.i_cbp_luma;
if( h->mb.i_skip_intra == 2 )
h->mc.memcpy_aligned( h->mb.pic.i8x8_dct_buf, h->dct.luma8x8, sizeof(h->mb.pic.i8x8_dct_buf) );
}
}
else
{
static const uint16_t cost_div_fix8[3] = {1024,512,341};
a->i_satd_i8x8 = COST_MAX;
i_cost = (i_cost * cost_div_fix8[idx]) >> 8;
}
/* Not heavily tuned */
static const uint8_t i8x8_thresh[11] = { 4, 4, 4, 5, 5, 5, 6, 6, 6, 6, 6 };
if( a->b_early_terminate && X264_MIN(i_cost, a->i_satd_i16x16) > (i_satd_inter*i8x8_thresh[h->mb.i_subpel_refine])>>2 )
return;
}
/* 4x4 prediction selection */
//帧内4x4
if( flags & X264_ANALYSE_I4x4 )
{
/*
* 16x16 宏块被划分为16个4x4子块
*
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
* | | | | |
* +----+----+----+----+
*
*/
int i_cost = lambda * (24+16); /* 24from JVT (SATD0), 16 from base predmode costs */
int i_satd_thresh = a->b_early_terminate ? X264_MIN3( i_satd_inter, a->i_satd_i16x16, a->i_satd_i8x8 ) : COST_MAX;
h->mb.i_cbp_luma = 0;
if( a->b_early_terminate && a->i_mbrd )
i_satd_thresh = i_satd_thresh * (10-a->b_fast_intra)/8;
if( h->sh.i_type == SLICE_TYPE_B )
i_cost += lambda * i_mb_b_cost_table[I_4x4];
//循环所有的4x4块
for( idx = 0;; idx++ )
{
//编码帧中的像素
//block_idx_xy_fenc[]记录了4x4小块在p_fenc中的偏移地址
pixel *p_src_by = p_src + block_idx_xy_fenc[idx];
//重建帧中的像素
//block_idx_xy_fdec[]记录了4x4小块在p_fdec中的偏移地址
pixel *p_dst_by = p_dst + block_idx_xy_fdec[idx];
int i_best = COST_MAX;
int i_pred_mode = x264_mb_predict_intra4x4_mode( h, idx );
//获得可用的帧内预测模式-针对帧内4x4
//左侧是否有可用数据?上方是否有可用数据?
const int8_t *predict_mode = predict_4x4_mode_available( a->b_avoid_topright, h->mb.i_neighbour4[idx], idx );
if( (h->mb.i_neighbour4[idx] & (MB_TOPRIGHT|MB_TOP)) == MB_TOP )
/* emulate missing topright samples */
MPIXEL_X4( &p_dst_by[4 - FDEC_STRIDE] ) = PIXEL_SPLAT_X4( p_dst_by[3 - FDEC_STRIDE] );
if( h->pixf.intra_mbcmp_x9_4x4 && predict_mode[8] >= 0 )
{
/* No shortcuts here. The SSSE3 implementation of intra_mbcmp_x9 is fast enough. */
i_best = h->pixf.intra_mbcmp_x9_4x4( p_src_by, p_dst_by, cost_i4x4_mode-i_pred_mode );
i_cost += i_best & 0xffff;
i_best >>= 16;
a->i_predict4x4[idx] = i_best;
if( i_cost > i_satd_thresh || idx == 15 )
break;
h->mb.cache.intra4x4_pred_mode[x264_scan8[idx]] = i_best;
}
else
{
if( !h->mb.b_lossless && predict_mode[5] >= 0 )
{
ALIGNED_ARRAY_16( int32_t, satd,[9] );
h->pixf.intra_mbcmp_x3_4x4( p_src_by, p_dst_by, satd );
int favor_vertical = satd[I_PRED_4x4_H] > satd[I_PRED_4x4_V];
satd[i_pred_mode] -= 3 * lambda;
i_best = satd[I_PRED_4x4_DC]; a->i_predict4x4[idx] = I_PRED_4x4_DC;
COPY2_IF_LT( i_best, satd[I_PRED_4x4_H], a->i_predict4x4[idx], I_PRED_4x4_H );
COPY2_IF_LT( i_best, satd[I_PRED_4x4_V], a->i_predict4x4[idx], I_PRED_4x4_V );
/* Take analysis shortcuts: don't analyse modes that are too
* far away direction-wise from the favored mode. */
if( a->i_mbrd < 1 + a->b_fast_intra )
predict_mode = intra_analysis_shortcut[a->b_avoid_topright][predict_mode[8] >= 0][favor_vertical];
else
predict_mode += 3;
}
if( i_best > 0 )
{
//遍历所有Intra4x4帧内模式,最多9种
for( ; *predict_mode >= 0; predict_mode++ )
{
int i_satd;
int i_mode = *predict_mode;
/*
* 4x4帧内预测举例
*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
* Horizontal预测方式
* |
* --+-----------
* X5|X5 X5 X5 X5
* X6|X6 X6 X6 X6
* X7|X7 X7 X7 X7
* X8|X8 X8 X8 X8
*
* DC预测方式
* |X1 X2 X3 X4
* --+-----------
* X5|
* X6| Y
* X7|
* X8|
*
* Y=(X1+X2+X3+X4+X5+X6+X7+X8)/8
*
*/
if( h->mb.b_lossless )
x264_predict_lossless_4x4( h, p_dst_by, 0, idx, i_mode );
else
h->predict_4x4[i_mode]( p_dst_by );//帧内预测汇编函数-存储在重建帧中
//计算SAD或者是SATD(SATD(Transformed)是经过Hadamard变换之后的SAD)
//即编码代价
//p_src_by编码帧,p_dst_by重建帧
i_satd = h->pixf.mbcmp[PIXEL_4x4]( p_dst_by, FDEC_STRIDE, p_src_by, FENC_STRIDE );
if( i_pred_mode == x264_mb_pred_mode4x4_fix(i_mode) )
{
i_satd -= lambda * 3;
if( i_satd <= 0 )
{
i_best = i_satd;
a->i_predict4x4[idx] = i_mode;
break;
}
}
//COPY2_IF_LT()函数的意思是“copy if little”。即如果值更小(代价更小),就拷贝。
//宏定义展开后如下所示
//if((i_satd)<(i_best))
//{
// (i_best)=(i_satd);
// (a->i_predict4x4[idx])=(i_mode);
//}
//看看代价是否更小
//i_best中存储了最小的代价值
//i_predict4x4[idx]中存储了代价最小的预测模式(idx为4x4小块的序号)
COPY2_IF_LT( i_best, i_satd, a->i_predict4x4[idx], i_mode );
}
}
//累加各个4x4块的代价(累加每个块的最小代价)
i_cost += i_best + 3 * lambda;
if( i_cost > i_satd_thresh || idx == 15 )
break;
if( h->mb.b_lossless )
x264_predict_lossless_4x4( h, p_dst_by, 0, idx, a->i_predict4x4[idx] );
else
h->predict_4x4[a->i_predict4x4[idx]]( p_dst_by );
/*
* 将mode填充至intra4x4_pred_mode_cache
*
* 用简单图形表示intra4x4_pred_mode_cache如下。数字代表填充顺序(一共填充16次)
* |
* --+-------------------
* | 0 0 0 0 0 0 0 0
* | 0 0 0 0 1 2 5 6
* | 0 0 0 0 3 4 7 8
* | 0 0 0 0 9 10 13 14
* | 0 0 0 0 11 12 15 16
*
*/
h->mb.cache.intra4x4_pred_mode[x264_scan8[idx]] = a->i_predict4x4[idx];
}
/* we need to encode this block now (for next ones) */
x264_mb_encode_i4x4( h, 0, idx, a->i_qp, a->i_predict4x4[idx], 0 );
}
if( idx == 15 )//处理最后一个4x4小块(一共16个块)
{
//开销(累加完的)
a->i_satd_i4x4 = i_cost;
if( h->mb.i_skip_intra )
{
h->mc.copy[PIXEL_16x16]( h->mb.pic.i4x4_fdec_buf, 16, p_dst, FDEC_STRIDE, 16 );
h->mb.pic.i4x4_nnz_buf[0] = M32( &h->mb.cache.non_zero_count[x264_scan8[ 0]] );
h->mb.pic.i4x4_nnz_buf[1] = M32( &h->mb.cache.non_zero_count[x264_scan8[ 2]] );
h->mb.pic.i4x4_nnz_buf[2] = M32( &h->mb.cache.non_zero_count[x264_scan8[ 8]] );
h->mb.pic.i4x4_nnz_buf[3] = M32( &h->mb.cache.non_zero_count[x264_scan8[10]] );
h->mb.pic.i4x4_cbp = h->mb.i_cbp_luma;
if( h->mb.i_skip_intra == 2 )
h->mc.memcpy_aligned( h->mb.pic.i4x4_dct_buf, h->dct.luma4x4, sizeof(h->mb.pic.i4x4_dct_buf) );
}
}
else
a->i_satd_i4x4 = COST_MAX;
}
}
总体说来x264_mb_analyse_intra()通过计算Intra16x16,Intra8x8(暂时没有研究),Intra4x4这3中帧内预测模式的代价,比较后得到最佳的帧内预测模式。该函数的等流程大致如下:
(1)进行Intra16X16模式的预测后文将会对其中涉及到的几种汇编函数进行分析。在看源代码之前,简单记录一下相关的知识。a)调用predict_16x16_mode_available()根据周围宏块的情况判断其可用的预测模式(主要检查左边和上边的块是否可用)。b)循环计算4种Intra16x16帧内预测模式:i.调用predict_16x16[]()汇编函数进行Intra16x16帧内预测ii.调用x264_pixel_function_t中的mbcmp[]()计算编码代价(mbcmp[]()指向SAD或者SATD汇编函数)。c)获取最小代价的Intra16x16模式。(2)进行Intra8x8模式的预测(未研究,流程应该类似)
(3)进行Intra4X4块模式的预测a)循环处理16个4x4的块:i.调用x264_mb_predict_intra4x4_mode()根据周围宏块情况判断该块可用的预测模式。ii.循环计算9种Intra4x4的帧内预测模式:1)调用predict_4x4 []()汇编函数进行Intra4x4帧内预测2)调用x264_pixel_function_t中的mbcmp[]()计算编码代价(mbcmp[]()指向SAD或者SATD汇编函数)。iii.获取最小代价的Intra4x4模式。b)将16个4X4块的最小代价相加,得到总代价。(4)将上述3中模式的代价进行对比,取最小者为当前宏块的帧内预测模式。
帧内预测知识
简单记录一下帧内预测的方法。帧内预测根据宏块左边和上边的边界像素值推算宏块内部的像素值,帧内预测的效果如下图所示。其中左边的图为图像原始画面,右边的图为经过帧内预测后没有叠加残差的画面。

H.264中有两种帧内预测模式:16x16亮度帧内预测模式和4x4亮度帧内预测模式。其中16x16帧内预测模式一共有4种,如下图所示。
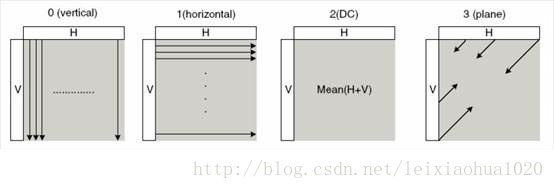
模式 | 描述 |
Vertical | 由上边像素推出相应像素值 |
Horizontal | 由左边像素推出相应像素值 |
DC | 由上边和左边像素平均值推出相应像素值 |
Plane | 由上边和左边像素推出相应像素值 |
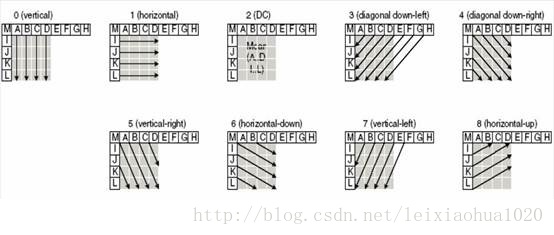
4x4帧内预测模式一共有9种,如下图所示。
像素比较知识
帧内预测代价计算的过程中涉及到SAD和SATD像素计算,简单记录几个相关的概念。有关SAD、SATD、SSD的定义如下:SAD(Sum of Absolute Difference)也可以称为SAE(Sum of Absolute Error),即绝对误差和。它的计算方法就是求出两个像素块对应像素点的差值,将这些差值分别求绝对值之后再进行累加。H.264中使用SAD和SATD进行宏块预测模式的判断。早期的编码器使用SAD进行计算,近期的编码器多使用SATD进行计算。为什么使用SATD而不使用SAD呢?关键原因在于编码之后码流的大小是和图像块DCT变换后频域信息紧密相关的,而和变换前的时域信息关联性小一些。SAD只能反应时域信息;SATD却可以反映频域信息,而且计算复杂度也低于DCT变换,因此是比较合适的模式选择的依据。
SATD(Sum of Absolute Transformed Difference)即Hadamard变换后再绝对值求和。它和SAD的区别在于多了一个“变换”。
SSD(Sum of Squared Difference)也可以称为SSE(Sum of Squared Error),即差值的平方和。它和SAD的区别在于多了一个“平方”。
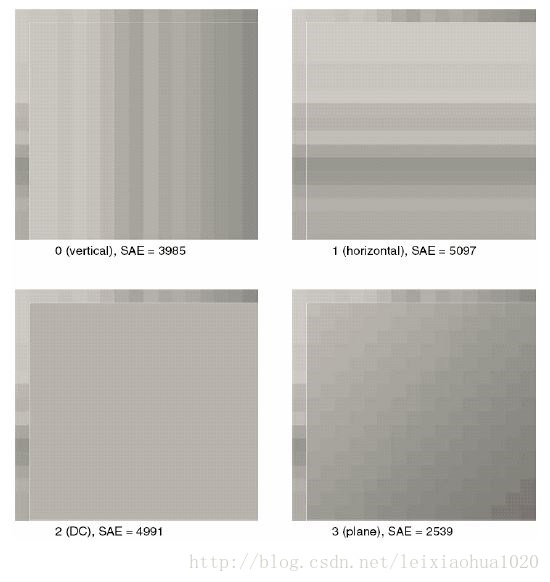
使用SAD进行模式选择的示例如下所示。下面这张图代表了一个普通的Intra16x16的宏块的像素。它的下方包含了使用Vertical,Horizontal,DC和Plane四种帧内预测模式预测的像素。通过计算可以得到这几种预测像素和原始像素之间的SAD(SAE)分别为3985,5097,4991,2539。由于Plane模式的SAD取值最小,由此可以断定Plane模式对于这个宏块来说是最好的帧内预测模式。
下面按照Intra16x16预测,Intra4x4预测,像素计算的顺序记录依次记录各个模块的汇编函数源代码。
Intra16x16帧内预测源代码
Intra16x16帧内预测模块的初始化函数是x264_predict_16x16_init()。该函数对x264_predict_t结构体中的函数指针进行了赋值。X264运行的过程中只要调用x264_predict_t的函数指针就可以完成相应的功能。
x264_predict_16x16_init()
x264_predict_16x16_init()用于初始化Intra16x16帧内预测汇编函数。该函数的定义位于x264\common\predict.c,如下所示。//Intra16x16帧内预测汇编函数初始化
void x264_predict_16x16_init( int cpu, x264_predict_t pf[7] )
{
//C语言版本
//================================================
//垂直 Vertical
pf[I_PRED_16x16_V ] = x264_predict_16x16_v_c;
//水平 Horizontal
pf[I_PRED_16x16_H ] = x264_predict_16x16_h_c;
//DC
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_c;
//Plane
pf[I_PRED_16x16_P ] = x264_predict_16x16_p_c;
//这几种是啥?
pf[I_PRED_16x16_DC_LEFT]= x264_predict_16x16_dc_left_c;
pf[I_PRED_16x16_DC_TOP ]= x264_predict_16x16_dc_top_c;
pf[I_PRED_16x16_DC_128 ]= x264_predict_16x16_dc_128_c;
//================================================
//MMX版本
#if HAVE_MMX
x264_predict_16x16_init_mmx( cpu, pf );
#endif
//ALTIVEC版本
#if HAVE_ALTIVEC
if( cpu&X264_CPU_ALTIVEC )
x264_predict_16x16_init_altivec( pf );
#endif
//ARMV6版本
#if HAVE_ARMV6
x264_predict_16x16_init_arm( cpu, pf );
#endif
//AARCH64版本
#if ARCH_AARCH64
x264_predict_16x16_init_aarch64( cpu, pf );
#endif
}
从源代码可看出,x264_predict_16x16_init()首先对帧内预测函数指针数组x264_predict_t[]中的元素赋值了C语言版本的函数x264_predict_16x16_v_c(),x264_predict_16x16_h_c(),x264_predict_16x16_dc_c(),x264_predict_16x16_p_c();然后会判断系统平台的特性,如果平台支持的话,会调用x264_predict_16x16_init_mmx(),x264_predict_16x16_init_arm()等给x264_predict_t[]中的元素赋值经过汇编优化的函数。下文首先看一下Intra16x16中的4种帧内预测模式的C语言版本,作为对比再看一下Intra16x16中Vertical模式的X86汇编版本和NEON汇编版本。
x264_predict_16x16_v_c()
x264_predict_16x16_v_c()是Intra16x16帧内预测Vertical模式的C语言版本函数。该函数的定义位于common\predict.c,如下所示。//16x16帧内预测
//垂直预测(Vertical)
void x264_predict_16x16_v_c( pixel *src )
{
/*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
*/
/*
* 【展开宏定义】
* uint32_t v0 = ((x264_union32_t*)(&src[ 0-FDEC_STRIDE]))->i;
* uint32_t v1 = ((x264_union32_t*)(&src[ 4-FDEC_STRIDE]))->i;
* uint32_t v2 = ((x264_union32_t*)(&src[ 8-FDEC_STRIDE]))->i;
* uint32_t v3 = ((x264_union32_t*)(&src[12-FDEC_STRIDE]))->i;
* 在这里,上述代码实际上相当于:
* uint32_t v0 = *((uint32_t*)(&src[ 0-FDEC_STRIDE]));
* uint32_t v1 = *((uint32_t*)(&src[ 4-FDEC_STRIDE]));
* uint32_t v2 = *((uint32_t*)(&src[ 8-FDEC_STRIDE]));
* uint32_t v3 = *((uint32_t*)(&src[12-FDEC_STRIDE]));
* 即分成4次,每次取出4个像素(一共16个像素),分别赋值给v0,v1,v2,v3
* 取出的值源自于16x16块上面的一行像素
* 0| 4 8 12 16
* || v0 | v1 | v2 | v3 |
* ---++==========+==========+==========+==========+
* ||
* ||
* ||
* ||
* ||
* ||
*
*/
//pixel4实际上是uint32_t(占用32bit),存储4个像素的值(每个像素占用8bit)
pixel4 v0 = MPIXEL_X4( &src[ 0-FDEC_STRIDE] );
pixel4 v1 = MPIXEL_X4( &src[ 4-FDEC_STRIDE] );
pixel4 v2 = MPIXEL_X4( &src[ 8-FDEC_STRIDE] );
pixel4 v3 = MPIXEL_X4( &src[12-FDEC_STRIDE] );
//循环赋值16行
for( int i = 0; i < 16; i++ )
{
//【展开宏定义】
//(((x264_union32_t*)(src+ 0))->i) = v0;
//(((x264_union32_t*)(src+ 4))->i) = v1;
//(((x264_union32_t*)(src+ 8))->i) = v2;
//(((x264_union32_t*)(src+12))->i) = v3;
//即分成4次,每次赋值4个像素
//
MPIXEL_X4( src+ 0 ) = v0;
MPIXEL_X4( src+ 4 ) = v1;
MPIXEL_X4( src+ 8 ) = v2;
MPIXEL_X4( src+12 ) = v3;
//下一行
//FDEC_STRIDE=32,是重建宏块缓存fdec_buf一行的数据量
src += FDEC_STRIDE;
}
}
从源代码可以看出,x264_predict_16x16_v_c()首先取出16x16块上面一行像素值,依次存储在v0、v1、v2、v3,然后循环16次赋值给块中的16行像素。
x264_predict_16x16_h_c()
x264_predict_16x16_h_c()是Intra16x16帧内预测Horizontal模式的C语言版本函数。该函数的定义位于common\predict.c,如下所示。//16x16帧内预测
//水平预测(Horizontal)
void x264_predict_16x16_h_c( pixel *src )
{
/*
* Horizontal预测方式
* |
* --+-----------
* X5|X5 X5 X5 X5
* X6|X6 X6 X6 X6
* X7|X7 X7 X7 X7
* X8|X8 X8 X8 X8
*
*/
/*
* const pixel4 v = PIXEL_SPLAT_X4( src[-1] );
* 宏定义展开后
* const uint32_t v = (src[-1])*0x01010101U;
*
* PIXEL_SPLAT_X4()的作用应该是把最后一个像素(最后8位)拷贝给前面3个像素(前24位)
* 即把0x0100009F变成0x9F9F9F9F
* 推导:
* 前提是x占8bit(对应1个像素)
* y=x*0x01010101
* =x*(0x00000001+0x00000100+0x00010000+0x01000000)
* =x<<0+x<<8+x<<16+x<<24
*
* const uint32_t v = (src[-1])*0x01010101U含义:
* 每行把src[-1]中像素值例如0x02赋值给v.v取值为0x02020202
* src[-1]即16x16块左侧的值
*/
//循环赋值16行
for( int i = 0; i < 16; i++ )
{
const pixel4 v = PIXEL_SPLAT_X4( src[-1] );
//宏定义展开后:
//((x264_union32_t*)(src+ 0))->i=v;
//((x264_union32_t*)(src+ 4))->i=v;
//((x264_union32_t*)(src+ 8))->i=v;
//((x264_union32_t*)(src+12))->i=v;
//即分4次,每次赋值4个像素(一行一共16个像素,取值是一样的)
//
// 0| 4 8 12 16
// || | | | |
//---++==========+==========+==========+==========+
// ||
// v || v | v | v | v |
// ||
// ||
// ||
//
MPIXEL_X4( src+ 0 ) = v;
MPIXEL_X4( src+ 4 ) = v;
MPIXEL_X4( src+ 8 ) = v;
MPIXEL_X4( src+12 ) = v;
//下一行
//FDEC_STRIDE=32,是重建宏块缓存fdec_buf一行的数据量
src += FDEC_STRIDE;
}
}
从源代码可以看出,x264_predict_16x16_h_c()首先取出16x16块每行左边的1个像素,复制4份后存储在v中,然后分成4次将v赋值给这一行像素。其中“PIXEL_SPLAT_X4()”的功能是取出变量低8位的数值复制4份到高24位,相关的推导功能已经记录在源代码中,不再重复叙述。
x264_predict_16x16_dc_c()
x264_predict_16x16_dc_c()是Intra16x16帧内预测DC模式的C语言版本函数。该函数的定义位于common\predict.c,如下所示。#define PREDICT_16x16_DC(v)\
for( int i = 0; i < 16; i++ )\
{\
MPIXEL_X4( src+ 0 ) = v;\
MPIXEL_X4( src+ 4 ) = v;\
MPIXEL_X4( src+ 8 ) = v;\
MPIXEL_X4( src+12 ) = v;\
src += FDEC_STRIDE;\
}
void x264_predict_16x16_dc_c( pixel *src )
{
/*
* DC预测方式
* |X1 X2 X3 X4
* --+-----------
* X5|
* X6| Y
* X7|
* X8|
*
* Y=(X1+X2+X3+X4+X5+X6+X7+X8)/8
*/
int dc = 0;
//把16x16块中所有像素的值加起来,存储在dc中
for( int i = 0; i < 16; i++ )
{
//左侧的值
dc += src[-1 + i * FDEC_STRIDE];
//上方的值
dc += src[i - FDEC_STRIDE];
}
//加起来的值除以32(一共16+16个点)
//“+16”是为了四舍五入?
//PIXEL_SPLAT_X4()的作用应该是把最后一个像素(最后8位)拷贝给前面3个像素(前24位)
//即把0x0100009F变成0x9F9F9F9F
pixel4 dcsplat = PIXEL_SPLAT_X4( ( dc + 16 ) >> 5 );
//赋值到16x16块中的每个像素
/*
* 宏展开之后结果
* for( int i = 0; i < 16; i++ )
* {
* (((x264_union32_t*)(src+ 0))->i) = dcsplat;
* (((x264_union32_t*)(src+ 4))->i) = dcsplat;
* (((x264_union32_t*)(src+ 8))->i) = dcsplat;
* (((x264_union32_t*)(src+12))->i) = dcsplat;
* src += 32;
* }
*/
PREDICT_16x16_DC( dcsplat );
}
从源代码可以看出,x264_predict_16x16_dc_c()求出16x16块上面一行像素和左边一列像素的平均值,然后赋值给16x16块中的每一个像素。
X86以及ARM平台汇编函数
除了C语言版本的帧内预测函数之外,还包含了很多汇编语言版本的函数。下面以Intra16x16帧内预测Vertical模式为例,看一下该函数的X86平台汇编版本以及ARM平台汇编版本。
x264_predict_16x16_init_mmx()
x264_predict_16x16_init_mmx()用于初始化经过x86汇编优化过的Intra16x16的帧内预测函数。该函数的定义位于common\x86\predict-c.c(在“x86”子文件夹下),如下所示。//Intra16x16帧内预测汇编函数-MMX版本
void x264_predict_16x16_init_mmx( int cpu, x264_predict_t pf[7] )
{
if( !(cpu&X264_CPU_MMX2) )
return;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_mmx2;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_mmx2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_mmx2;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_mmx2;
pf[I_PRED_16x16_H] = x264_predict_16x16_h_mmx2;
#if HIGH_BIT_DEPTH
if( !(cpu&X264_CPU_SSE) )
return;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_sse;
if( !(cpu&X264_CPU_SSE2) )
return;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_sse2;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_sse2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_sse2;
pf[I_PRED_16x16_H] = x264_predict_16x16_h_sse2;
pf[I_PRED_16x16_P] = x264_predict_16x16_p_sse2;
if( !(cpu&X264_CPU_AVX) )
return;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_avx;
if( !(cpu&X264_CPU_AVX2) )
return;
pf[I_PRED_16x16_H] = x264_predict_16x16_h_avx2;
#else
#if !ARCH_X86_64
pf[I_PRED_16x16_P] = x264_predict_16x16_p_mmx2;
#endif
if( !(cpu&X264_CPU_SSE) )
return;
pf[I_PRED_16x16_V] = x264_predict_16x16_v_sse;
if( !(cpu&X264_CPU_SSE2) )
return;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_sse2;
if( cpu&X264_CPU_SSE2_IS_SLOW )
return;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_sse2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_sse2;
pf[I_PRED_16x16_P] = x264_predict_16x16_p_sse2;
if( !(cpu&X264_CPU_SSSE3) )
return;
if( !(cpu&X264_CPU_SLOW_PSHUFB) )
pf[I_PRED_16x16_H] = x264_predict_16x16_h_ssse3;
#if HAVE_X86_INLINE_ASM
pf[I_PRED_16x16_P] = x264_predict_16x16_p_ssse3;
#endif
if( !(cpu&X264_CPU_AVX) )
return;
pf[I_PRED_16x16_P] = x264_predict_16x16_p_avx;
#endif // HIGH_BIT_DEPTH
if( cpu&X264_CPU_AVX2 )
{
pf[I_PRED_16x16_P] = x264_predict_16x16_p_avx2;
pf[I_PRED_16x16_DC] = x264_predict_16x16_dc_avx2;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_avx2;
pf[I_PRED_16x16_DC_LEFT] = x264_predict_16x16_dc_left_avx2;
}
}
可以看出,针对Intra16x16的Vertical帧内预测模式,x264_predict_16x16_init_mmx()会根据系统的特型初始化2个函数:如果系统仅支持MMX指令集,就会初始化x264_predict_16x16_v_mmx2();如果系统还支持SSE指令集,就会初始化x264_predict_16x16_v_sse()。下面看一下这2个函数的代码。
x264_predict_16x16_v_mmx2()
x264_predict_16x16_v_sse()
在x264中,x264_predict_16x16_v_mmx2()和x264_predict_16x16_v_sse()这两个函数的定义是写到一起的。它们的定义位于common\x86\predict-a.asm,如下所示。
;-----------------------------------------------------------------------------
; void predict_16x16_v( pixel *src )
; Intra16x16帧内预测Vertical模式
;-----------------------------------------------------------------------------
;SIZEOF_PIXEL取值为1
;FDEC_STRIDEB为重建宏块缓存fdec_buf一行像素的大小,取值为32
;
;平台相关的信息位于x86inc.asm
;INIT_MMX中
; mmsize为8
; mova为movq
;INIT_XMM中:
; mmsize为16
; mova为movdqa
;
;STORE16的定义在前面,用于循环16行存储数据
%macro PREDICT_16x16_V 0
cglobal predict_16x16_v, 1,2
%assign %%i 0
%rep 16*SIZEOF_PIXEL/mmsize ;rep循环执行,拷贝16x16块上方的1行像素数据至m0,m1...
;mmssize为指令1次处理比特数
mova m %+ %%i, [r0-FDEC_STRIDEB+%%i*mmsize] ;移入m0,m1...
%assign %%i %%i+1
%endrep
%if 16*SIZEOF_PIXEL/mmsize == 4 ;1行需要处理4次
STORE16 m0, m1, m2, m3 ;循环存储16行,每次存储4个寄存器
%elif 16*SIZEOF_PIXEL/mmsize == 2 ;1行需要处理2次
STORE16 m0, m1 ;循环存储16行,每次存储2个寄存器
%else ;1行需要处理1次
STORE16 m0 ;循环存储16行,每次存储1个寄存器
%endif
RET
%endmacro
INIT_MMX mmx2
PREDICT_16x16_V
INIT_XMM sse
PREDICT_16x16_V
从汇编代码可以看出,x264_predict_16x16_v_mmx2()和x264_predict_16x16_v_sse()的逻辑是一模一样的。它们之间的不同主要在于一条指令处理的数据量:MMX指令的MOVA对应的是MOVQ,一次处理8Byte(8个像素);SSE指令的MOVA对应的是MOVDQA,一次处理16Byte(16个像素,正好是16x16块中的一行像素)。
作为对比,我们可以看一下ARM平台下汇编优化过的Intra16x16的帧内预测函数。这些汇编函数的初始化函数是x264_predict_16x16_init_arm()。
x264_predict_16x16_init_arm()
x264_predict_16x16_init_arm()用于初始化ARM平台下汇编优化过的Intra16x16的帧内预测函数。该函数的定义位于common\arm\predict-c.c(“arm”文件夹下),如下所示。void x264_predict_16x16_init_arm( int cpu, x264_predict_t pf[7] )
{
if (!(cpu&X264_CPU_NEON))
return;
#if !HIGH_BIT_DEPTH
pf[I_PRED_16x16_DC ] = x264_predict_16x16_dc_neon;
pf[I_PRED_16x16_DC_TOP] = x264_predict_16x16_dc_top_neon;
pf[I_PRED_16x16_DC_LEFT]= x264_predict_16x16_dc_left_neon;
pf[I_PRED_16x16_H ] = x264_predict_16x16_h_neon;
pf[I_PRED_16x16_V ] = x264_predict_16x16_v_neon;
pf[I_PRED_16x16_P ] = x264_predict_16x16_p_neon;
#endif // !HIGH_BIT_DEPTH
}
从源代码可以看出,针对Vertical预测模式,x264_predict_16x16_init_arm()初始化了经过NEON指令集优化的函数x264_predict_16x16_v_neon()。
x264_predict_16x16_v_neon()
x264_predict_16x16_v_neon()的定义位于common\arm\predict-a.S,如下所示。/*
* Intra16x16帧内预测Vertical模式-NEON
*
*/
/* FDEC_STRIDE=32Bytes,为重建宏块一行像素的大小 */
/* R0存储16x16像素块地址 */
function x264_predict_16x16_v_neon
sub r0, r0, #FDEC_STRIDE /* r0=r0-FDEC_STRIDE */
mov ip, #FDEC_STRIDE /* ip=32 */
/* VLD向量加载: 内存->NEON寄存器 */
/* d0,d1为64bit双字寄存器,共16Byte,在这里存储16x16块上方一行像素 */
vld1.64 {d0-d1}, [r0,:128], ip /* 将R0指向的数据从内存加载到d0和d1寄存器(64bit) */
/* r0=r0+ip */
.rept 16 /* 循环16次,一次处理1行 */
/* VST向量存储: NEON寄存器->内存 */
vst1.64 {d0-d1}, [r0,:128], ip /* 将d0和d1寄存器中的数据传递给R0指向的内存 */
/* r0=r0+ip */
.endr
bx lr /* 子程序返回 */
endfunc
可以看出,x264_predict_16x16_v_neon()使用vld1.64指令载入16x16块上方的一行像素,然后在一个16次的循环中,使用vst1.64指令将该行像素值赋值给16x16块的每一行。
至此有关Intra16x16的Vertical帧内预测方式的源代码就分析完了。
Intra4x4帧内预测源代码
Intra4x4帧内预测模块的初始化函数是x264_predict_4x4_init()。该函数对x264_predict_t结构体中的函数指针进行了赋值。X264运行的过程中只要调用x264_predict_t的函数指针就可以完成相应的功能。x264_predict_4x4_init()
x264_predict_4x4_init()用于初始化Intra4x4帧内预测汇编函数。该函数的定义位于common\predict.c,如下所示。//Intra4x4帧内预测汇编函数初始化
void x264_predict_4x4_init( int cpu, x264_predict_t pf[12] )
{
//9种Intra4x4预测方式
pf[I_PRED_4x4_V] = x264_predict_4x4_v_c;
pf[I_PRED_4x4_H] = x264_predict_4x4_h_c;
pf[I_PRED_4x4_DC] = x264_predict_4x4_dc_c;
pf[I_PRED_4x4_DDL] = x264_predict_4x4_ddl_c;
pf[I_PRED_4x4_DDR] = x264_predict_4x4_ddr_c;
pf[I_PRED_4x4_VR] = x264_predict_4x4_vr_c;
pf[I_PRED_4x4_HD] = x264_predict_4x4_hd_c;
pf[I_PRED_4x4_VL] = x264_predict_4x4_vl_c;
pf[I_PRED_4x4_HU] = x264_predict_4x4_hu_c;
//这些是?
pf[I_PRED_4x4_DC_LEFT]= x264_predict_4x4_dc_left_c;
pf[I_PRED_4x4_DC_TOP] = x264_predict_4x4_dc_top_c;
pf[I_PRED_4x4_DC_128] = x264_predict_4x4_dc_128_c;
#if HAVE_MMX
x264_predict_4x4_init_mmx( cpu, pf );
#endif
#if HAVE_ARMV6
x264_predict_4x4_init_arm( cpu, pf );
#endif
#if ARCH_AARCH64
x264_predict_4x4_init_aarch64( cpu, pf );
#endif
}
从源代码可看出,x264_predict_4x4_init()首先对帧内预测函数指针数组x264_predict_t[]中的元素赋值了C语言版本的函数x264_predict_4x4_v_c(),x264_predict_4x4_h_c(),x264_predict_4x4_dc_c(),x264_predict_4x4_p_c()等一系列函数(Intra4x4有9种,后面那几种是怎么回事?);然后会判断系统平台的特性,如果平台支持的话,会调用x264_predict_4x4_init_mmx(),x264_predict_4x4_init_arm()等给x264_predict_t[]中的元素赋值经过汇编优化的函数。下面看一下Intra4x4帧内预测中Vertical、Horizontal、DC模式的C语言版本函数。
x264_predict_4x4_v_c()
x264_predict_4x4_v_c()实现了Intra4x4帧内预测Vertical模式。该函数的定义位于common\predict.c,如下所示。void x264_predict_4x4_v_c( pixel *src )
{
/*
* Vertical预测方式
* |X1 X2 X3 X4
* --+-----------
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
* |X1 X2 X3 X4
*
*/
/*
* 宏展开后的结果如下所示
* 注:重建宏块缓存fdec_buf一行的数据量为32Byte
*
* (((x264_union32_t*)(&src[(0)+(0)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(1)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(2)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(3)*32]))->i) = (((x264_union32_t*)(&src[(0)+(-1)*32]))->i);
*/
PREDICT_4x4_DC(SRC_X4(0,-1));
}
x264_predict_4x4_v_c()函数的函数体极其简单,只有一个宏定义“PREDICT_4x4_DC(SRC_X4(0,-1));”。如果把该宏展开后,可以看出它取了4x4块上面一行4个像素的值,然后分别赋值给4x4块的4行像素。
x264_predict_4x4_h_c()
x264_predict_4x4_h_c()实现了Intra4x4帧内预测Horizontal模式。该函数的定义位于common\predict.c,如下所示。void x264_predict_4x4_h_c( pixel *src )
{
/*
* Horizontal预测方式
* |
* --+-----------
* X5|X5 X5 X5 X5
* X6|X6 X6 X6 X6
* X7|X7 X7 X7 X7
* X8|X8 X8 X8 X8
*
*/
/*
* 宏展开后的结果如下所示
* 注:重建宏块缓存fdec_buf一行的数据量为32Byte
*
* 该代码就是把每行左边的值赋值给该行像素,一次赋值一行
*
* (((x264_union32_t*)(&src[(0)+(0)*32]))->i)=((src[(-1)+(0)*32])*0x01010101U);
* (((x264_union32_t*)(&src[(0)+(1)*32]))->i)=((src[(-1)+(1)*32])*0x01010101U);
* (((x264_union32_t*)(&src[(0)+(2)*32]))->i)=((src[(-1)+(2)*32])*0x01010101U);
* (((x264_union32_t*)(&src[(0)+(3)*32]))->i)=((src[(-1)+(3)*32])*0x01010101U);
*
* PIXEL_SPLAT_X4()的作用应该是把最后一个像素(最后8位)拷贝给前面3个像素(前24位)
* 即把0x0100009F变成0x9F9F9F9F
* 推导:
* 前提是x占8bit(对应1个像素)
* y=x*0x01010101
* =x*(0x00000001+0x00000100+0x00010000+0x01000000)
* =x<<0+x<<8+x<<16+x<<24
*
* const uint32_t v = (src[-1])*0x01010101U含义:
* 每行把src[-1]中像素值例如0x02赋值给v.v取值为0x02020202
* src[-1]即16x16块左侧的值
*
*/
SRC_X4(0,0) = PIXEL_SPLAT_X4( SRC(-1,0) );
SRC_X4(0,1) = PIXEL_SPLAT_X4( SRC(-1,1) );
SRC_X4(0,2) = PIXEL_SPLAT_X4( SRC(-1,2) );
SRC_X4(0,3) = PIXEL_SPLAT_X4( SRC(-1,3) );
}
从源代码可以看出,x264_predict_4x4_h_c()首先取出4x4块每行左边的1个像素,复制4份后赋值给这一行像素。其中“PIXEL_SPLAT_X4()”的功能是取出变量低8位的数值复制4份到高24位。
x264_predict_4x4_dc_c()
x264_predict_4x4_dc_c()实现了Intra4x4帧内预测DC模式。该函数的定义位于common\predict.c,如下所示。void x264_predict_4x4_dc_c( pixel *src )
{
/*
* DC预测方式
* |X1 X2 X3 X4
* --+-----------
* X5|
* X6| Y
* X7|
* X8|
*
* Y=(X1+X2+X3+X4+X5+X6+X7+X8)/8
*/
/*
* 宏展开后的结果如下所示
* 注:重建宏块缓存fdec_buf一行的数据量为32Byte
* 注2:“+4”是为了四舍五入
*
* uint32_t dc=(((src[(-1)+(0)*32] + src[(-1)+(1)*32] + src[(-1)+(2)*32] + src[(-1)+(3)*32] +
* src[(0)+(-1)*32] + src[(1)+(-1)*32] + src[(2)+(-1)*32] + src[(3)+(-1)*32] + 4) >> 3)*0x01010101U)
*
* 一次赋值一行
* (((x264_union32_t*)(&src[(0)+(0)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(1)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(2)*32]))->i) =
* (((x264_union32_t*)(&src[(0)+(3)*32]))->i) = dc;
*
*/
pixel4 dc = PIXEL_SPLAT_X4( (SRC(-1,0) + SRC(-1,1) + SRC(-1,2) + SRC(-1,3) +
SRC(0,-1) + SRC(1,-1) + SRC(2,-1) + SRC(3,-1) + 4) >> 3 );
PREDICT_4x4_DC( dc );
}
从源代码可以看出,x264_predict_4x4_dc_c()取出了4x4块左边和上边的8个像素,将它们的平均值赋值给4x4块中的每个像素。
像素计算源代码
像素计算模块的初始化函数是x264_pixel_init()。该函数对x264_pixel_function_t结构体中的函数指针进行了赋值。X264运行的过程中只要调用x264_pixel_function_t的函数指针就可以完成相应的功能。
x264_pixel_init()
x264_pixel_init()初始化像素值计算相关的汇编函数(包括SAD、SATD、SSD等)。该函数的定义位于common\pixel.c,如下所示。/****************************************************************************
* x264_pixel_init:
****************************************************************************/
//SAD等和像素计算有关的函数
void x264_pixel_init( int cpu, x264_pixel_function_t *pixf )
{
memset( pixf, 0, sizeof(*pixf) );
//初始化2个函数-16x16,16x8
#define INIT2_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_16x16] = x264_pixel_##name2##_16x16##cpu;\
pixf->name1[PIXEL_16x8] = x264_pixel_##name2##_16x8##cpu;
//初始化4个函数-(16x16,16x8),8x16,8x8
#define INIT4_NAME( name1, name2, cpu ) \
INIT2_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_8x16] = x264_pixel_##name2##_8x16##cpu;\
pixf->name1[PIXEL_8x8] = x264_pixel_##name2##_8x8##cpu;
//初始化5个函数-(16x16,16x8,8x16,8x8),8x4
#define INIT5_NAME( name1, name2, cpu ) \
INIT4_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_8x4] = x264_pixel_##name2##_8x4##cpu;
//初始化6个函数-(16x16,16x8,8x16,8x8,8x4),4x8
#define INIT6_NAME( name1, name2, cpu ) \
INIT5_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_4x8] = x264_pixel_##name2##_4x8##cpu;
//初始化7个函数-(16x16,16x8,8x16,8x8,8x4,4x8),4x4
#define INIT7_NAME( name1, name2, cpu ) \
INIT6_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_4x4] = x264_pixel_##name2##_4x4##cpu;
#define INIT8_NAME( name1, name2, cpu ) \
INIT7_NAME( name1, name2, cpu ) \
pixf->name1[PIXEL_4x16] = x264_pixel_##name2##_4x16##cpu;
//重新起个名字
#define INIT2( name, cpu ) INIT2_NAME( name, name, cpu )
#define INIT4( name, cpu ) INIT4_NAME( name, name, cpu )
#define INIT5( name, cpu ) INIT5_NAME( name, name, cpu )
#define INIT6( name, cpu ) INIT6_NAME( name, name, cpu )
#define INIT7( name, cpu ) INIT7_NAME( name, name, cpu )
#define INIT8( name, cpu ) INIT8_NAME( name, name, cpu )
#define INIT_ADS( cpu ) \
pixf->ads[PIXEL_16x16] = x264_pixel_ads4##cpu;\
pixf->ads[PIXEL_16x8] = x264_pixel_ads2##cpu;\
pixf->ads[PIXEL_8x8] = x264_pixel_ads1##cpu;
//8个sad函数
INIT8( sad, );
INIT8_NAME( sad_aligned, sad, );
//7个sad函数-一次性计算3次
INIT7( sad_x3, );
//7个sad函数-一次性计算4次
INIT7( sad_x4, );
//8个ssd函数
//ssd可以用来计算PSNR
INIT8( ssd, );
//8个satd函数
//satd计算的是经过Hadamard变换后的值
INIT8( satd, );
//8个satd函数-一次性计算3次
INIT7( satd_x3, );
//8个satd函数-一次性计算4次
INIT7( satd_x4, );
INIT4( hadamard_ac, );
INIT_ADS( );
pixf->sa8d[PIXEL_16x16] = x264_pixel_sa8d_16x16;
pixf->sa8d[PIXEL_8x8] = x264_pixel_sa8d_8x8;
pixf->var[PIXEL_16x16] = x264_pixel_var_16x16;
pixf->var[PIXEL_8x16] = x264_pixel_var_8x16;
pixf->var[PIXEL_8x8] = x264_pixel_var_8x8;
pixf->var2[PIXEL_8x16] = x264_pixel_var2_8x16;
pixf->var2[PIXEL_8x8] = x264_pixel_var2_8x8;
//计算UV的
pixf->ssd_nv12_core = pixel_ssd_nv12_core;
//计算SSIM
pixf->ssim_4x4x2_core = ssim_4x4x2_core;
pixf->ssim_end4 = ssim_end4;
pixf->vsad = pixel_vsad;
pixf->asd8 = pixel_asd8;
pixf->intra_sad_x3_4x4 = x264_intra_sad_x3_4x4;
pixf->intra_satd_x3_4x4 = x264_intra_satd_x3_4x4;
pixf->intra_sad_x3_8x8 = x264_intra_sad_x3_8x8;
pixf->intra_sa8d_x3_8x8 = x264_intra_sa8d_x3_8x8;
pixf->intra_sad_x3_8x8c = x264_intra_sad_x3_8x8c;
pixf->intra_satd_x3_8x8c = x264_intra_satd_x3_8x8c;
pixf->intra_sad_x3_8x16c = x264_intra_sad_x3_8x16c;
pixf->intra_satd_x3_8x16c = x264_intra_satd_x3_8x16c;
pixf->intra_sad_x3_16x16 = x264_intra_sad_x3_16x16;
pixf->intra_satd_x3_16x16 = x264_intra_satd_x3_16x16;
//后面的初始化基本上都是汇编优化过的函数
#if HIGH_BIT_DEPTH
#if HAVE_MMX
if( cpu&X264_CPU_MMX2 )
{
INIT7( sad, _mmx2 );
INIT7_NAME( sad_aligned, sad, _mmx2 );
INIT7( sad_x3, _mmx2 );
INIT7( sad_x4, _mmx2 );
INIT8( satd, _mmx2 );
INIT7( satd_x3, _mmx2 );
INIT7( satd_x4, _mmx2 );
INIT4( hadamard_ac, _mmx2 );
INIT8( ssd, _mmx2 );
INIT_ADS( _mmx2 );
pixf->ssd_nv12_core = x264_pixel_ssd_nv12_core_mmx2;
pixf->var[PIXEL_16x16] = x264_pixel_var_16x16_mmx2;
pixf->var[PIXEL_8x8] = x264_pixel_var_8x8_mmx2;
#if ARCH_X86
pixf->var2[PIXEL_8x8] = x264_pixel_var2_8x8_mmx2;
pixf->var2[PIXEL_8x16] = x264_pixel_var2_8x16_mmx2;
#endif
pixf->intra_sad_x3_4x4 = x264_intra_sad_x3_4x4_mmx2;
pixf->intra_satd_x3_4x4 = x264_intra_satd_x3_4x4_mmx2;
pixf->intra_sad_x3_8x8 = x264_intra_sad_x3_8x8_mmx2;
pixf->intra_sad_x3_8x8c = x264_intra_sad_x3_8x8c_mmx2;
pixf->intra_satd_x3_8x8c = x264_intra_satd_x3_8x8c_mmx2;
pixf->intra_sad_x3_8x16c = x264_intra_sad_x3_8x16c_mmx2;
pixf->intra_satd_x3_8x16c = x264_intra_satd_x3_8x16c_mmx2;
pixf->intra_sad_x3_16x16 = x264_intra_sad_x3_16x16_mmx2;
pixf->intra_satd_x3_16x16 = x264_intra_satd_x3_16x16_mmx2;
}
if( cpu&X264_CPU_SSE2 )
{
INIT4_NAME( sad_aligned, sad, _sse2_aligned );
INIT5( ssd, _sse2 );
INIT6( satd, _sse2 );
pixf->satd[PIXEL_4x16] = x264_pixel_satd_4x16_sse2;
pixf->sa8d[PIXEL_16x16] = x264_pixel_sa8d_16x16_sse2;
pixf->sa8d[PIXEL_8x8] = x264_pixel_sa8d_8x8_sse2;
#if ARCH_X86_64
pixf->intra_sa8d_x3_8x8 = x264_intra_sa8d_x3_8x8_sse2;
pixf->sa8d_satd[PIXEL_16x16] = x264_pixel_sa8d_satd_16x16_sse2;
#endif
pixf->intra_sad_x3_4x4 = x264_intra_sad_x3_4x4_sse2;
pixf->ssd_nv12_core = x264_pixel_ssd_nv12_core_sse2;
pixf->ssim_4x4x2_core = x264_pixel_ssim_4x4x2_core_sse2;
pixf->ssim_end4 = x264_pixel_ssim_end4_sse2;
pixf->var[PIXEL_16x16] = x264_pixel_var_16x16_sse2;
pixf->var[PIXEL_8x8] = x264_pixel_var_8x8_sse2;
pixf->var2[PIXEL_8x8] = x264_pixel_var2_8x8_sse2;
pixf->var2[PIXEL_8x16] = x264_pixel_var2_8x16_sse2;
pixf->intra_sad_x3_8x8 = x264_intra_sad_x3_8x8_sse2;
}
//此处省略大量的X86、ARM等平台的汇编函数初始化代码
}
x264_pixel_init()的源代码非常的长,主要原因在于它把C语言版本的函数以及各种平台的汇编函数都写到一块了(不知道现在最新的版本是不是还是这样)。x264_pixel_init()包含了大量和像素计算有关的函数,包括SAD、SATD、SSD、SSIM等等。它的输入参数x264_pixel_function_t是一个结构体,其中包含了各种像素计算的函数接口。x264_pixel_function_t的定义如下所示。
typedef struct
{
x264_pixel_cmp_t sad[8];
x264_pixel_cmp_t ssd[8];
x264_pixel_cmp_t satd[8];
x264_pixel_cmp_t ssim[7];
x264_pixel_cmp_t sa8d[4];
x264_pixel_cmp_t mbcmp[8]; /* either satd or sad for subpel refine and mode decision */
x264_pixel_cmp_t mbcmp_unaligned[8]; /* unaligned mbcmp for subpel */
x264_pixel_cmp_t fpelcmp[8]; /* either satd or sad for fullpel motion search */
x264_pixel_cmp_x3_t fpelcmp_x3[7];
x264_pixel_cmp_x4_t fpelcmp_x4[7];
x264_pixel_cmp_t sad_aligned[8]; /* Aligned SAD for mbcmp */
int (*vsad)( pixel *, intptr_t, int );
int (*asd8)( pixel *pix1, intptr_t stride1, pixel *pix2, intptr_t stride2, int height );
uint64_t (*sa8d_satd[1])( pixel *pix1, intptr_t stride1, pixel *pix2, intptr_t stride2 );
uint64_t (*var[4])( pixel *pix, intptr_t stride );
int (*var2[4])( pixel *pix1, intptr_t stride1,
pixel *pix2, intptr_t stride2, int *ssd );
uint64_t (*hadamard_ac[4])( pixel *pix, intptr_t stride );
void (*ssd_nv12_core)( pixel *pixuv1, intptr_t stride1,
pixel *pixuv2, intptr_t stride2, int width, int height,
uint64_t *ssd_u, uint64_t *ssd_v );
void (*ssim_4x4x2_core)( const pixel *pix1, intptr_t stride1,
const pixel *pix2, intptr_t stride2, int sums[2][4] );
float (*ssim_end4)( int sum0[5][4], int sum1[5][4], int width );
/* multiple parallel calls to cmp. */
x264_pixel_cmp_x3_t sad_x3[7];
x264_pixel_cmp_x4_t sad_x4[7];
x264_pixel_cmp_x3_t satd_x3[7];
x264_pixel_cmp_x4_t satd_x4[7];
/* abs-diff-sum for successive elimination.
* may round width up to a multiple of 16. */
int (*ads[7])( int enc_dc[4], uint16_t *sums, int delta,
uint16_t *cost_mvx, int16_t *mvs, int width, int thresh );
/* calculate satd or sad of V, H, and DC modes. */
void (*intra_mbcmp_x3_16x16)( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_16x16) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_16x16) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_4x4) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_4x4) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_4x4) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_chroma)( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_chroma) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_chroma) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_8x16c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_8x16c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_8x16c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_8x8c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_satd_x3_8x8c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_sad_x3_8x8c) ( pixel *fenc, pixel *fdec, int res[3] );
void (*intra_mbcmp_x3_8x8) ( pixel *fenc, pixel edge[36], int res[3] );
void (*intra_sa8d_x3_8x8) ( pixel *fenc, pixel edge[36], int res[3] );
void (*intra_sad_x3_8x8) ( pixel *fenc, pixel edge[36], int res[3] );
/* find minimum satd or sad of all modes, and set fdec.
* may be NULL, in which case just use pred+satd instead. */
int (*intra_mbcmp_x9_4x4)( pixel *fenc, pixel *fdec, uint16_t *bitcosts );
int (*intra_satd_x9_4x4) ( pixel *fenc, pixel *fdec, uint16_t *bitcosts );
int (*intra_sad_x9_4x4) ( pixel *fenc, pixel *fdec, uint16_t *bitcosts );
int (*intra_mbcmp_x9_8x8)( pixel *fenc, pixel *fdec, pixel edge[36], uint16_t *bitcosts, uint16_t *satds );
int (*intra_sa8d_x9_8x8) ( pixel *fenc, pixel *fdec, pixel edge[36], uint16_t *bitcosts, uint16_t *satds );
int (*intra_sad_x9_8x8) ( pixel *fenc, pixel *fdec, pixel edge[36], uint16_t *bitcosts, uint16_t *satds );
} x264_pixel_function_t;
在x264_pixel_init()中定义了好几个宏,用于给x264_pixel_function_t结构体中的函数接口赋值。例如“INIT8( sad, )”用于给x264_pixel_function_t中的sad[8]赋值。该宏展开后的代码如下。
pixf->sad[PIXEL_16x16] = x264_pixel_sad_16x16;
pixf->sad[PIXEL_16x8] = x264_pixel_sad_16x8;
pixf->sad[PIXEL_8x16] = x264_pixel_sad_8x16;
pixf->sad[PIXEL_8x8] = x264_pixel_sad_8x8;
pixf->sad[PIXEL_8x4] = x264_pixel_sad_8x4;
pixf->sad[PIXEL_4x8] = x264_pixel_sad_4x8;
pixf->sad[PIXEL_4x4] = x264_pixel_sad_4x4;
pixf->sad[PIXEL_4x16] = x264_pixel_sad_4x16;pixf->ssd[PIXEL_16x16] = x264_pixel_ssd_16x16;
pixf->ssd[PIXEL_16x8] = x264_pixel_ssd_16x8;
pixf->ssd[PIXEL_8x16] = x264_pixel_ssd_8x16;
pixf->ssd[PIXEL_8x8] = x264_pixel_ssd_8x8;
pixf->ssd[PIXEL_8x4] = x264_pixel_ssd_8x4;
pixf->ssd[PIXEL_4x8] = x264_pixel_ssd_4x8;
pixf->ssd[PIXEL_4x4] = x264_pixel_ssd_4x4;
pixf->ssd[PIXEL_4x16] = x264_pixel_ssd_4x16;pixf->satd[PIXEL_16x16] = x264_pixel_satd_16x16;
pixf->satd[PIXEL_16x8] = x264_pixel_satd_16x8;
pixf->satd[PIXEL_8x16] = x264_pixel_satd_8x16;
pixf->satd[PIXEL_8x8] = x264_pixel_satd_8x8;
pixf->satd[PIXEL_8x4] = x264_pixel_satd_8x4;
pixf->satd[PIXEL_4x8] = x264_pixel_satd_4x8;
pixf->satd[PIXEL_4x4] = x264_pixel_satd_4x4;
pixf->satd[PIXEL_4x16] = x264_pixel_satd_4x16;x264_pixel_sad_4x4()
x264_pixel_sad_4x4()用于计算4x4块的SAD。该函数的定义位于common\pixel.c,如下所示。 static int x264_pixel_sad_4x4( pixel *pix1, intptr_t i_stride_pix1,
pixel *pix2, intptr_t i_stride_pix2 )
{
int i_sum = 0;
for( int y = 0; y < 4; y++ ) //4个像素
{
for( int x = 0; x < 4; x++ ) //4个像素
{
i_sum += abs( pix1[x] - pix2[x] );//相减之后求绝对值,然后累加
}
pix1 += i_stride_pix1;
pix2 += i_stride_pix2;
}
return i_sum;
}x264_pixel_sad_x4_4x4()
x264_pixel_sad_4x4()用于计算4个4x4块的SAD。该函数的定义位于common\pixel.c,如下所示。 static void x264_pixel_sad_x4_4x4( pixel *fenc, pixel *pix0, pixel *pix1,pixel *pix2, pixel *pix3,
intptr_t i_stride, int scores[4] )
{
scores[0] = x264_pixel_sad_4x4( fenc, 16, pix0, i_stride );
scores[1] = x264_pixel_sad_4x4( fenc, 16, pix1, i_stride );
scores[2] = x264_pixel_sad_4x4( fenc, 16, pix2, i_stride );
scores[3] = x264_pixel_sad_4x4( fenc, 16, pix3, i_stride );
}x264_pixel_ssd_4x4()
x264_pixel_ssd_4x4()用于计算4x4块的SSD。该函数的定义位于common\pixel.c,如下所示。
static int x264_pixel_ssd_4x4( pixel *pix1, intptr_t i_stride_pix1,
pixel *pix2, intptr_t i_stride_pix2 )
{
int i_sum = 0;
for( int y = 0; y < 4; y++ ) //4个像素
{
for( int x = 0; x < 4; x++ ) //4个像素
{
int d = pix1[x] - pix2[x]; //相减
i_sum += d*d; //平方之后,累加
}
pix1 += i_stride_pix1;
pix2 += i_stride_pix2;
}
return i_sum;
}x264_pixel_satd_4x4()
x264_pixel_satd_4x4()用于计算4x4块的SATD。该函数的定义位于common\pixel.c,如下所示。//SAD(Sum of Absolute Difference)=SAE(Sum of Absolute Error)即绝对误差和
//SATD(Sum of Absolute Transformed Difference)即hadamard变换后再绝对值求和
//
//为什么帧内模式选择要用SATD?
//SAD即绝对误差和,仅反映残差时域差异,影响PSNR值,不能有效反映码流的大小。
//SATD即将残差经哈德曼变换的4x4块的预测残差绝对值总和,可以将其看作简单的时频变换,其值在一定程度上可以反映生成码流的大小。
//4x4的SATD
static NOINLINE int x264_pixel_satd_4x4( pixel *pix1, intptr_t i_pix1, pixel *pix2, intptr_t i_pix2 )
{
sum2_t tmp[4][2];
sum2_t a0, a1, a2, a3, b0, b1;
sum2_t sum = 0;
for( int i = 0; i < 4; i++, pix1 += i_pix1, pix2 += i_pix2 )
{
a0 = pix1[0] - pix2[0];
a1 = pix1[1] - pix2[1];
b0 = (a0+a1) + ((a0-a1)<<BITS_PER_SUM);
a2 = pix1[2] - pix2[2];
a3 = pix1[3] - pix2[3];
b1 = (a2+a3) + ((a2-a3)<<BITS_PER_SUM);
tmp[i][0] = b0 + b1;
tmp[i][1] = b0 - b1;
}
for( int i = 0; i < 2; i++ )
{
HADAMARD4( a0, a1, a2, a3, tmp[0][i], tmp[1][i], tmp[2][i], tmp[3][i] );
a0 = abs2(a0) + abs2(a1) + abs2(a2) + abs2(a3);
sum += ((sum_t)a0) + (a0>>BITS_PER_SUM);
}
return sum >> 1;
}
可以看出x264_pixel_satd_4x4()调用了一个宏HADAMARD4()用于Hadamard变换的计算,并最终将两个像素块Hadamard变换后对应元素求差的绝对值之后,累加到sum变量上。
mbcmp_init()
Intra宏块帧内预测模式的分析函数x264_mb_analyse_intra()中并没有直接调用x264_pixel_function_t 中sad[]/satd[]的函数,而是调用了x264_pixel_function_t的mbcmp[]中的函数。mbcmp[]中实际上就是存储的sad[]/satd[]中的函数。mbcmp_init()函数通过参数决定了mbcmp[]使用sad[]还是satd[]。该函数的定义位于encoder\encoder.c,如下所示。//决定了像素比较的时候用SAD还是SATD
static void mbcmp_init( x264_t *h )
{
//b_lossless一般为0
//主要看i_subpel_refine,大于1的话就使用SATD
int satd = !h->mb.b_lossless && h->param.analyse.i_subpel_refine > 1;
//sad或者satd赋值给mbcmp
memcpy( h->pixf.mbcmp, satd ? h->pixf.satd : h->pixf.sad_aligned, sizeof(h->pixf.mbcmp) );
memcpy( h->pixf.mbcmp_unaligned, satd ? h->pixf.satd : h->pixf.sad, sizeof(h->pixf.mbcmp_unaligned) );
h->pixf.intra_mbcmp_x3_16x16 = satd ? h->pixf.intra_satd_x3_16x16 : h->pixf.intra_sad_x3_16x16;
h->pixf.intra_mbcmp_x3_8x16c = satd ? h->pixf.intra_satd_x3_8x16c : h->pixf.intra_sad_x3_8x16c;
h->pixf.intra_mbcmp_x3_8x8c = satd ? h->pixf.intra_satd_x3_8x8c : h->pixf.intra_sad_x3_8x8c;
h->pixf.intra_mbcmp_x3_8x8 = satd ? h->pixf.intra_sa8d_x3_8x8 : h->pixf.intra_sad_x3_8x8;
h->pixf.intra_mbcmp_x3_4x4 = satd ? h->pixf.intra_satd_x3_4x4 : h->pixf.intra_sad_x3_4x4;
h->pixf.intra_mbcmp_x9_4x4 = h->param.b_cpu_independent || h->mb.b_lossless ? NULL
: satd ? h->pixf.intra_satd_x9_4x4 : h->pixf.intra_sad_x9_4x4;
h->pixf.intra_mbcmp_x9_8x8 = h->param.b_cpu_independent || h->mb.b_lossless ? NULL
: satd ? h->pixf.intra_sa8d_x9_8x8 : h->pixf.intra_sad_x9_8x8;
satd &= h->param.analyse.i_me_method == X264_ME_TESA;
memcpy( h->pixf.fpelcmp, satd ? h->pixf.satd : h->pixf.sad, sizeof(h->pixf.fpelcmp) );
memcpy( h->pixf.fpelcmp_x3, satd ? h->pixf.satd_x3 : h->pixf.sad_x3, sizeof(h->pixf.fpelcmp_x3) );
memcpy( h->pixf.fpelcmp_x4, satd ? h->pixf.satd_x4 : h->pixf.sad_x4, sizeof(h->pixf.fpelcmp_x4) );
}
从mbcmp_init()的源代码可以看出,当i_subpel_refine取值大于1的时候,satd变量为1,此时后续代码中赋值给mbcmp[]相关的一系列函数指针的函数就是SATD函数;当i_subpel_refine取值小于等于1的时候,satd变量为0,此时后续代码中赋值给mbcmp[]相关的一系列函数指针的函数就是SAD函数。
至此有关x264中的Intra宏块分析模块的源代码就分析完毕了。
雷霄骅
leixiaohua1020@126.com
http://blog.csdn.net/leixiaohua1020














 34万+
34万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









