










看到学姐开了博客我也坐不住啦
这道题标准KDtree模板题,借鉴一下黄学长的代码轻松水过
建树:
KD树的结构类似于平衡树,对于已知点集,求出其在某一维度上排序后的中间点(可以用stl的nth_element),然后把空间一分为二,再对每个部分递归建树,返回子部分分割点的编号,作为当前部分分割点的左右儿子。关于维度选择,可以求方差最大的维度,然而为了简化,这里选择横竖交替分割

int build(int l,int r,bool dir)
{
nthdir=dir;
nth_element(p+l,p+mid,p+r+1,cmp);
mn[mid][0]=mx[mid][0]=p[mid][0];
mn[mid][1]=mx[mid][1]=p[mid][1];
if(l<mid) lch[mid]=build(l,mid-1,dir^1);
if(r>mid) rch[mid]=build(mid+1,r,dir^1);
update(mid);
return mid;
}inline void update(int x)
{
int ll=lch[x];
int rr=rch[x];
if(ll)
{
mn[x][0]=min(mn[ll][0],mn[x][0]);
mn[x][1]=min(mn[ll][1],mn[x][1]);
mx[x][0]=max(mx[ll][0],mx[x][0]);
mx[x][1]=max(mx[ll][1],mx[x][1]);
}
if(rr)
{
mn[x][0]=min(mn[rr][0],mn[x][0]);
mn[x][1]=min(mn[rr][1],mn[x][1]);
mx[x][0]=max(mx[rr][0],mx[x][0]);
mx[x][1]=max(mx[rr][1],mx[x][1]);
}
}
插入不改变树的形态,直接判断插入点在分割点的哪边,如果存在子节点递归进去,否则创建子节点
void insert(int t,point P,bool dir)
{
if(P[dir]>=p[t][dir])
{
if(rch[t]) insert(rch[t],P,dir^1);
else {
rch[t]=++n;
p[n]=P;
mn[n][0]=mx[n][0]=P[0];
mn[n][1]=mx[n][1]=P[1];
}
}
else
{
if(lch[t]) insert(lch[t],P,dir^1);
else {
lch[t]=++n;
p[n]=P;
mn[n][0]=mx[n][0]=P[0];
mn[n][1]=mx[n][1]=P[1];
}
}
update(t);
}
inline int outd(int k,point P)
{
int tmp=0;
tmp+=max(0,mn[k][0]-P[0]);
tmp+=max(0,mn[k][1]-P[1]);
tmp+=max(0,P[0]-mx[k][0]);
tmp+=max(0,P[1]-mx[k][1]);
return tmp;
}
int ans=INF;
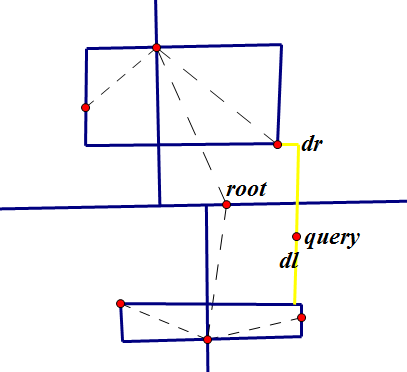
void query(int t,point P)
{
ans=min(ans,dist(p[t],P));
int dl=INF,dr=INF;
if(lch[t])dl=outd(lch[t],P);
if(rch[t])dr=outd(rch[t],P);
if(dl<dr)
{
if(dl<ans) query(lch[t],P);
if(dr<ans) query(rch[t],P);
}
else
{
if(dr<ans) query(rch[t],P);
if(dl<ans) query(lch[t],P);
}
}
/**************************************************************
Problem: 2648
User: Leo_h
Language: C++
Result: Accepted
Time:14520 ms
Memory:32060 kb
****************************************************************/
#include<cstdio>
#include<algorithm>
#include<cstdlib>
#include<cstring>
using namespace std;
int n,m;
#define maxn 1000000
#define INF 0x7f7f7f7f
#define maxdim 2
#define mid (l+r)/2
int mn[maxn][2];
int mx[maxn][2];
int lch[maxn];
int rch[maxn];
bool nthdir;
struct point
{
int pos[maxdim];
int& operator[](int x)
{
return pos[x];
}
point(int x,int y)
{
pos[0]=x;
pos[1]=y;
}
point(){}
}p[maxn];
inline int read(int &d)
{
char ch=getchar();
int tmp=1;
d=0;
while(ch<'0'||ch>'9')
{
if(ch=='-')tmp=-1;
ch=getchar();
}
while(ch>='0'&&ch<='9')
{
d=d*10+ch-'0';
ch=getchar();
}
return d=d*tmp;
}
inline bool cmp(point a,point b)
{
return a[nthdir]<b[nthdir];
}
inline int dist(point x,point y)
{
return abs(x[0]-y[0])+abs(x[1]-y[1]);
}
inline void update(int x)
{
int ll=lch[x];
int rr=rch[x];
if(ll)
{
mn[x][0]=min(mn[ll][0],mn[x][0]);
mn[x][1]=min(mn[ll][1],mn[x][1]);
mx[x][0]=max(mx[ll][0],mx[x][0]);
mx[x][1]=max(mx[ll][1],mx[x][1]);
}
if(rr)
{
mn[x][0]=min(mn[rr][0],mn[x][0]);
mn[x][1]=min(mn[rr][1],mn[x][1]);
mx[x][0]=max(mx[rr][0],mx[x][0]);
mx[x][1]=max(mx[rr][1],mx[x][1]);
}
}
int build(int l,int r,bool dir)
{
nthdir=dir;
nth_element(p+l,p+mid,p+r+1,cmp);
mn[mid][0]=mx[mid][0]=p[mid][0];
mn[mid][1]=mx[mid][1]=p[mid][1];
if(l<mid) lch[mid]=build(l,mid-1,dir^1);
if(r>mid) rch[mid]=build(mid+1,r,dir^1);
update(mid);
return mid;
}
inline int outd(int k,point P)
/*this function get the distance from P
to the cube made up of all points in k*/
/*if P is in the area divided by p[k],
this function will return 0*/
{
int tmp=0;
tmp+=max(0,mn[k][0]-P[0]);
tmp+=max(0,mn[k][1]-P[1]);
tmp+=max(0,P[0]-mx[k][0]);
tmp+=max(0,P[1]-mx[k][1]);
return tmp;
}
int ans=INF;
void query(int t,point P)
{
ans=min(ans,dist(p[t],P));
int dl=INF,dr=INF;
if(lch[t])dl=outd(lch[t],P);
if(rch[t])dr=outd(rch[t],P);
if(dl<dr)
{
if(dl<ans) query(lch[t],P);
if(dr<ans) query(rch[t],P);
}
else
{
if(dr<ans) query(rch[t],P);
if(dl<ans) query(lch[t],P);
}
}
void insert(int t,point P,bool dir)
{
if(P[dir]>=p[t][dir])
{
if(rch[t]) insert(rch[t],P,dir^1);
else {
rch[t]=++n;
p[n]=P;
mn[n][0]=mx[n][0]=P[0];
mn[n][1]=mx[n][1]=P[1];
}
}
else
{
if(lch[t]) insert(lch[t],P,dir^1);
else {
lch[t]=++n;
p[n]=P;
mn[n][0]=mx[n][0]=P[0];
mn[n][1]=mx[n][1]=P[1];
}
}
update(t);
}
int main()
{
read(n);
read(m);
for(int i=1;i<=n;i++)
read(p[i][0]),read(p[i][1]);
int root=build(1,n,0);
while(m--)
{
int mode,x,y;
read(mode);
read(x);
read(y);
if(mode==1) insert(root,point(x,y),0);
else {
ans=INF;
query(root,point(x,y));
printf("%d\n",ans);
}
}
return 0;
}














 842
842

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









