







 本文介绍了数据融合在卡尔曼滤波中的应用,通过结合系统模型预测和传感器测量,优化状态估计。以称重物体为例,展示了如何利用卡尔曼增益求得最优估计值,最终使得数据分布更集中。
本文介绍了数据融合在卡尔曼滤波中的应用,通过结合系统模型预测和传感器测量,优化状态估计。以称重物体为例,展示了如何利用卡尔曼增益求得最优估计值,最终使得数据分布更集中。
数据融合:
数据融合是指将来自不同传感器或源的信息整合在一起,以提高对系统状态的估计精度。在卡尔曼滤波中,数据融合通常涉及到两个主要来源的信息:预测(系统模型)和测量(传感器数据)。
在数据融合中,卡尔曼滤波通过结合系统模型的预测和传感器测量的信息,以最优的方式更新对系统状态的估计。这是通过计算卡尔曼增益来实现的,该增益确定了如何将预测值与测量值进行组合,以获得最优的状态估计。
下面举例说明:
假设用两个秤去称量同一个物体重量,分别的得到重量、
,已知这两个秤都有误差,标准差分别为
、
,这两个秤误差都符合正态分布。
现在来估计该物体的最优估计值,就需要上一次提到卡尔曼增益,,当
时
,当
时
。
由上述式子我们来求最优估计值,则需要使的标准差
最小,即方差
最小,那么就有式子:
(1)
因为、
相互独立,且
和
是乘数,所有式子(1)可以转换为:
(2)
即 (3)
要使最小,就需要求得
的极值点,即
时,
的值,求
(4)
将、
代入(4)可得
,将
代入式子(3)可得
,代入
可得
,由此就得到该物体质量的最优估计值,这就是过程就是数据融合。
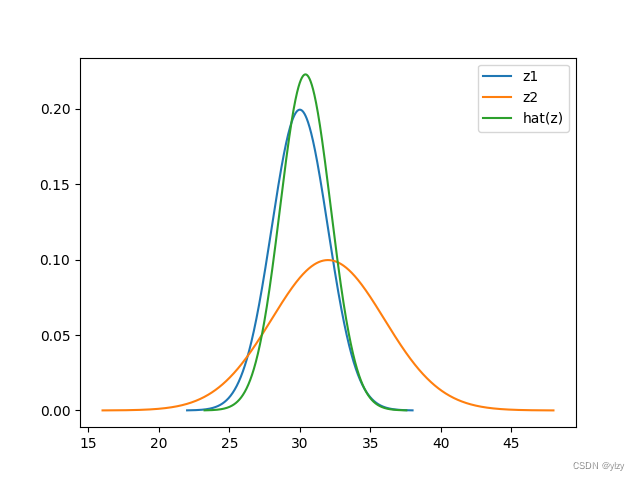
将上述在正态分布图中分别表示出来,我们可以看到
数据分布的更加集中,更接近于
。
参考资料 【【卡尔曼滤波器】2_数学基础_数据融合_协方差矩阵_状态空间方程_观测器问题】 https://www.bilibili.com/video/BV12D4y1S7fU/?share_source=copy_web&vd_source=c29456ffa88bc7559f8ffbe6f8e8f7a5

















 2026
2026

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









