







论文认为Batch Normalization并不是网络的必要构造,反而会带来不少问题,于是开始研究Normalizer-Free网络,希望既有相当的性能也能支持大规模训练。论文提出ACG梯度裁剪方法来辅助训练,能有效防止梯度爆炸,另外还基于NF-ResNet的思想将SE-ResNet改造成NFNet系列,可以使用4096的超大batch size进行训练,性能超越了Efficient系列
来源:晓飞的算法工程笔记 公众号
论文: High-Performance Large-Scale Image Recognition Without Normalization
- 论文地址:https://arxiv.org/abs/2102.06171
- 论文代码:https://github.com/deepmind/deepmind-research/tree/master/nfnets
Introduction
目前,计算机视觉的大部分模型都得益于深度残差网络和batch normalization,这两大创新能够帮助训练更深的网络,在训练集和测试集上达到很高的准确率。特别是batch normalization,不仅能够平滑损失曲线,使用更大的学习率和batch size进行训练,还有正则化的作用。然而,batch normalization并不是完美,batch normalization在实践中有三个缺点:
- 计算消耗大,内存消耗多。
- 在训练和推理上的用法不一致,并且带来额外的超参数。
- 打破了训练集的minibatch的独立性。
其中,第三个问题最为严重,这会引发一系列的负面问题。首先,batch normalization使得模型难以在不同的设备上复现精度,而且分布式训练经常出问题。其次,batch normalization不能用于要求每轮训练样本独立的任务中,如GAN和NLP任务。最后,batch normalization对batch size十分敏感,在batch size较低时表现较差,限制了有限设备上的模型大小。
因此,尽管batch normalization有很强大的作用,部分研究者仍在寻找一种简单的替代方案,不仅需要精度相当,还要能用在广泛的任务中。目前,大多数的替代方案都着力于抑制残差分支的权值大小,比如在残差分支的末尾引入一个初始为零的可学习的标量。但这些方法不是精度不够,就是无法用于大规模训练,精度始终不如EfficientNets。
至此,论文主要基于之前替代batch normalization的工作,尝试解决其中的核心问题,论文的主要贡献如下:
- 提出Adaptive Gradient Clipping(AGC),以维度为单位,基于权值范数和梯度范数的比例进行梯度裁剪。将AGC用于训练Normalizer-Free网络,使用更大batch size和更强数据增强进行训练。
- 设计Normalizer-Free ResNets系列,命名为NFNets,在ImageNet上达到SOTA,其中NFNet-F1与EfficientNet-B7精度相当,训练速度快8.7倍,最大的NFNet可达到86.5%top-1准确率。
- 实验证明,在3亿标签的私有数据集上预训练后,再在ImageNet上进行finetune,准确率能比batch normalization网络要高,最好的模型达到89.2%top-1准确率。
Understanding Batch Normalization
论文探讨了batch normalization的几个优点,这里简单说一下:
- downscale the residual branch:batch normalization限制了残差分支的权值大小,使得信号偏向skip path直接传输,有助于训练超深的网络。
- eliminate mean-shift:激活函数是非对称且均值非零的,使得训练初期激活后的特征值会变大且均为正数,batch normalization恰好可以消除这一问题。
- regularizing effect:由于batch normalization训练时用的是minibatch统计信息,相当于为当前batch引入了噪声,起到正则化的作用,可以防止过拟合,提高准确率。
- allows efficient large-batch training:batch normalization能够平滑loss曲线,可以使用更大的学习率和bach size进行训练。
Towards Removing Batch Normalization
这篇论文的研究基于作者之前的Normalizer-Free ResNets(NF-ResNets)进行拓展,NF-ResNets在去掉normalization层后依然可以有相当不错的训练和测试准确率。NF-ResNets的核心是采用
h
i
+
1
=
h
i
+
α
f
i
(
h
i
/
β
i
)
h_{i+1}=h_i+\alpha f_i(h_i/\beta_i)
hi+1=hi+αfi(hi/βi)形式的residual block,
h
i
h_i
hi为第
i
i
i个残差块的输入,
f
i
f_i
fi为第
i
i
i个residual block的残差分支。
f
i
f_i
fi要进行特殊初始化,使其有保持方差不变的功能,即
V
a
r
(
f
i
(
z
)
)
=
V
a
r
(
z
)
Var(f_i(z))=Var(z)
Var(fi(z))=Var(z)。
α
=
0.2
\alpha=0.2
α=0.2用于控制方差变化幅度,
β
i
=
V
a
r
(
h
i
)
\beta_i=\sqrt{Var(h_i)}
βi=Var(hi)为
h
i
h_i
hi的标准差。经过NF-ResNet的residual block处理后,输出的方差变为
V
a
r
(
h
i
+
1
)
=
V
a
r
(
h
i
)
+
α
2
Var(h_{i+1})=Var(h_i)+\alpha^2
Var(hi+1)=Var(hi)+α2。
此外,NF-ResNet的另一个核心是Scaled Weight Standardization,用于解决激活层带来的mean-shift现象,对卷积层进行如下权值重新初始化:

其中,
μ
i
=
(
1
/
B
)
∑
j
W
i
j
\mu_i=(1/B)\sum_jW_{ij}
μi=(1/B)∑jWij和
σ
i
2
=
(
1
/
N
)
∑
j
(
W
i
j
−
μ
i
)
2
\sigma^2_i=(1/N)\sum_j(W_{ij}-\mu_i)^2
σi2=(1/N)∑j(Wij−μi)2为对应卷积核的某行(fan-in)的均值和方差。另外,非线性激活函数的输出需要乘以一个特定的标量
γ
\gamma
γ,两者配合确保方差不变。
之前发布的文章也有NF-ResNet的详细解读,有兴趣的可以去看看。
Adaptive Gradient Clipping for Efficient Large-Batch Training
梯度裁剪能够帮助训练使用更大的学习率,还能够加速收敛,特别是在损失曲线不理想或使用大batch size训练的场景下。因此,论文认为梯度裁剪能帮助NF-ResNet适应大batch size训练场景。对于梯度向量 G = ∂ L / ∂ θ G=\partial L/\partial\theta G=∂L/∂θ,标准的梯度裁剪为:

裁剪阈值
λ
\lambda
λ是需要调试的超参数。根据经验,虽然梯度裁剪可以帮助训练使用更大的batch size,但模型的效果对阈值
λ
\lambda
λ的设定十分敏感,需要根据不同的模型深度、batch size和学习率进行细致的调试。于是,论文提出了更方便的Adaptive Gradient Clipping(AGC)。
定义
W
l
∈
R
N
×
M
W^l\in\mathbb{R}^{N\times M}
Wl∈RN×M和
G
l
∈
R
N
×
M
G^l\in\mathbb{R}^{N\times M}
Gl∈RN×M为
l
l
l层的权值矩阵和梯度矩阵,
∥
⋅
∥
F
\|\cdot\|_F
∥⋅∥F为F-范数,ACG算法通过梯度范数与权值范数之间比值
∥
G
l
∥
F
∥
W
l
∥
F
\frac{\|G^l\|_F}{\|W^l\|_F}
∥Wl∥F∥Gl∥F来进行动态的梯度裁剪。在实践时,论文发现按卷积核逐行(unit-wise)进行梯度裁剪的效果比整个卷积核进行梯度裁剪要好,最终ACG算法为:

裁剪阈值
λ
\lambda
λ为超参数,设定
∥
W
i
∥
F
∗
=
m
a
x
(
∥
W
i
∥
F
,
ϵ
=
1
0
−
3
)
\|W_i\|^{*}_F=max(\|W_i\|_F, \epsilon=10^{-3})
∥Wi∥F∗=max(∥Wi∥F,ϵ=10−3),避免零初始化时,参数总是将梯度裁为零。借助AGC算法,NF-ResNets可以使用更大的batch size(4096)进行训练,也可以使用更复杂的数据增强。最优的
λ
\lambda
λ需考虑优化器、学习率和batch size,通过实践发现,越大的batch size应该使用越小的
λ
\lambda
λ,比如batch size=4096使用
λ
=
0.01
\lambda=0.01
λ=0.01。
ACG算法跟优化器归一化有点类似,比如LARS。LARS将权值更新值的范数固定为权值范数的比值
Δ
w
=
γ
∗
η
∗
∥
w
l
∥
∥
∇
L
(
w
l
)
∥
∗
∇
L
(
w
t
l
)
\Delta w=\gamma * \eta * \frac{\|w^l\|}{\|\nabla L(w^l)\|} * \nabla L(w^l_t)
Δw=γ∗η∗∥∇L(wl)∥∥wl∥∗∇L(wtl),从而忽略梯度的量级,只保留梯度方向,能够缓解梯度爆炸和梯度消失的现象。ACG算法可以认为是优化器归一化的松弛版本,基于权值范数约束最大梯度,但不会约束梯度的下限或忽略梯度量级。论文也尝试了ACG和LARS一起使用,发现性能反而下降了。
Normalizer-Free Architectures with Improved Accuracy and Training Speed
论文以带GELU激活的SE-ResNeXt-D模型作为Normalizer-Free网络的基础,除训练加入ACG外,主要进行了以下改进:
- 将 3 × 3 3\times 3 3×3卷积变为分组卷积,每组的维度固定为128,组数由卷积的输入维度决定。更小的分组维度可以降低理论的计算量,但计算密度的降低导致不能很好地利用设备稠密计算的优势,实际不会带来更多加速。
- ResNet的深度扩展(从resnNet50扩展至ResNet200)主要集中在stage2和stage3,而stage1和stage4保持3个block的形式。这样的做法不是最优的,因为不管低层特征或高层特征,都需要足够的空间去学习。因此,论文先制定最小的F0网络的各stage的block数为 [ 1 , 2 , 6 , 3 ] [1,2,6,3] [1,2,6,3],后续更大网络都在此基础上以倍数扩展。
- ResNet的各stage维度为 [ 256 , 512 , 1024 , 2048 ] [256,512,1024,2048] [256,512,1024,2048],经过测试之后,改为 [ 256 , 512 , 1536 , 1536 ] [256,512,1536,1536] [256,512,1536,1536],stage3采用更大的容量,因为其足够深,需要更大的容量去收集特征,而stage4不增加深度主要是为了保持训练速度。
-
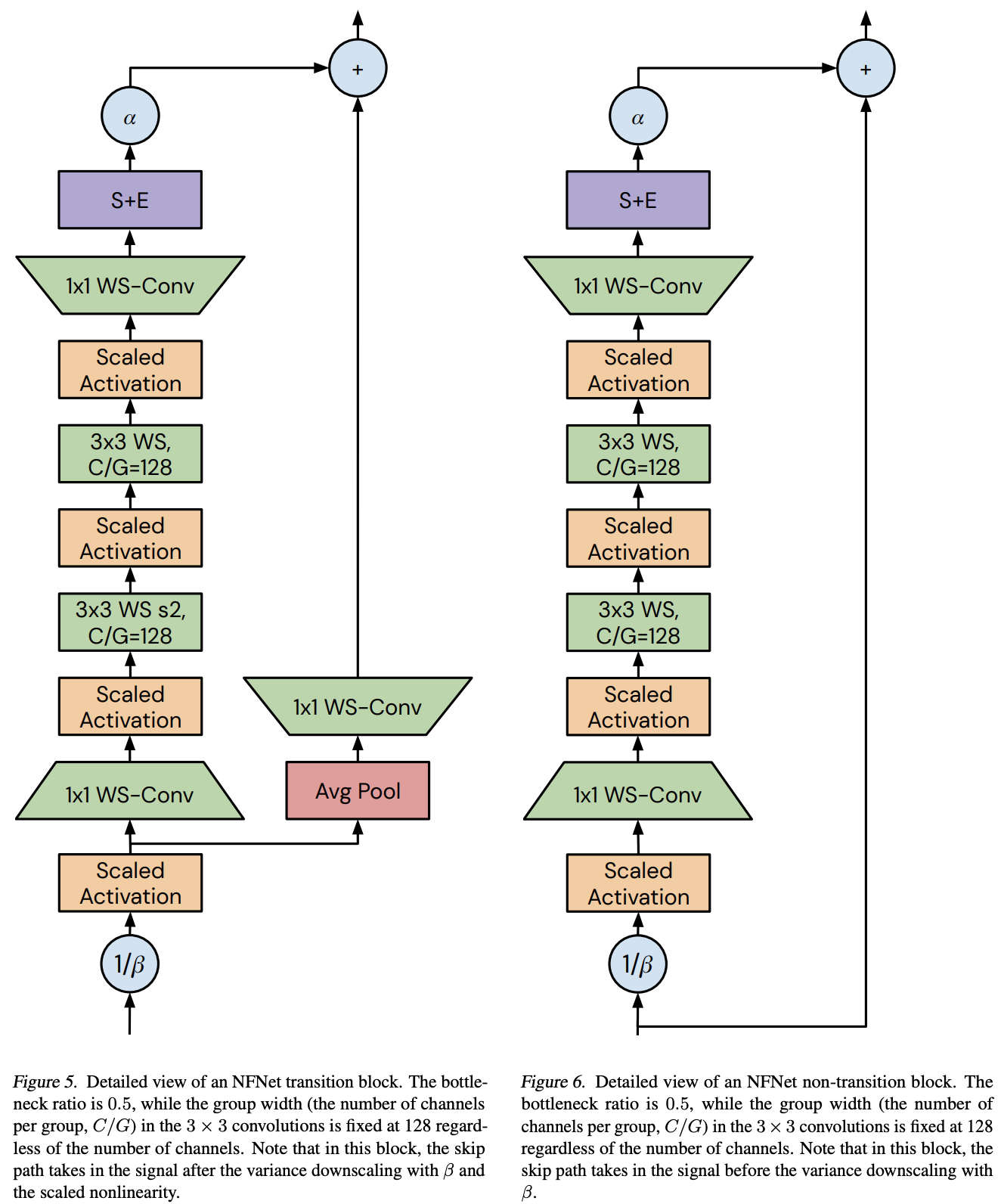
将NF-ResNet的bottleneck residual block应用到SE-ResNeXt中并进行修改,在原有的基础上添加了一个 3 × 3 3\times 3 3×3卷积,在计算量上仅有少量的增加。
-
构建一个缩放策略来生产不同计算资源的模型,论文发现宽度扩展对网络增益不大,于是仅考虑深度和输入分辨率的缩放。按前面说的,以倍数形式对基础网络进行深度扩展,同时缩放分辨率,使其训练和测试速度能达到上一个量级的一半。
-
当网络体积增大时,加强正则化强度。通过实验发现,调整weight decay和stochastic depth rate(训练过程随机使某些block的残差分支失效)都没有很大的收益,于是通过加大dropout的drop rate来达到正则化的目的。由于网络缺少BN的显示正则化,所以这一步是十分重要的,防止过拟合的出现。
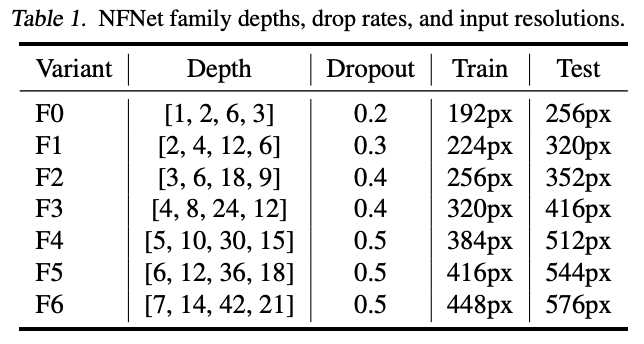
根据上述的修改,得出的NFNet系列的各参数如表1所示。这里网络的最后有全局池化层,所以训练和测试的分辨率可以不一样。
Experiment
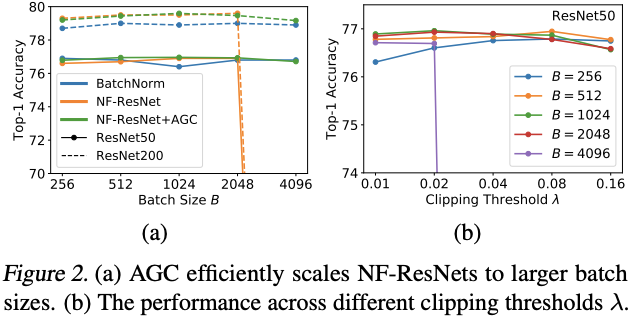
对比AGC在不同batch size下的效果,以及 λ \lambda λ与batch size的关系。
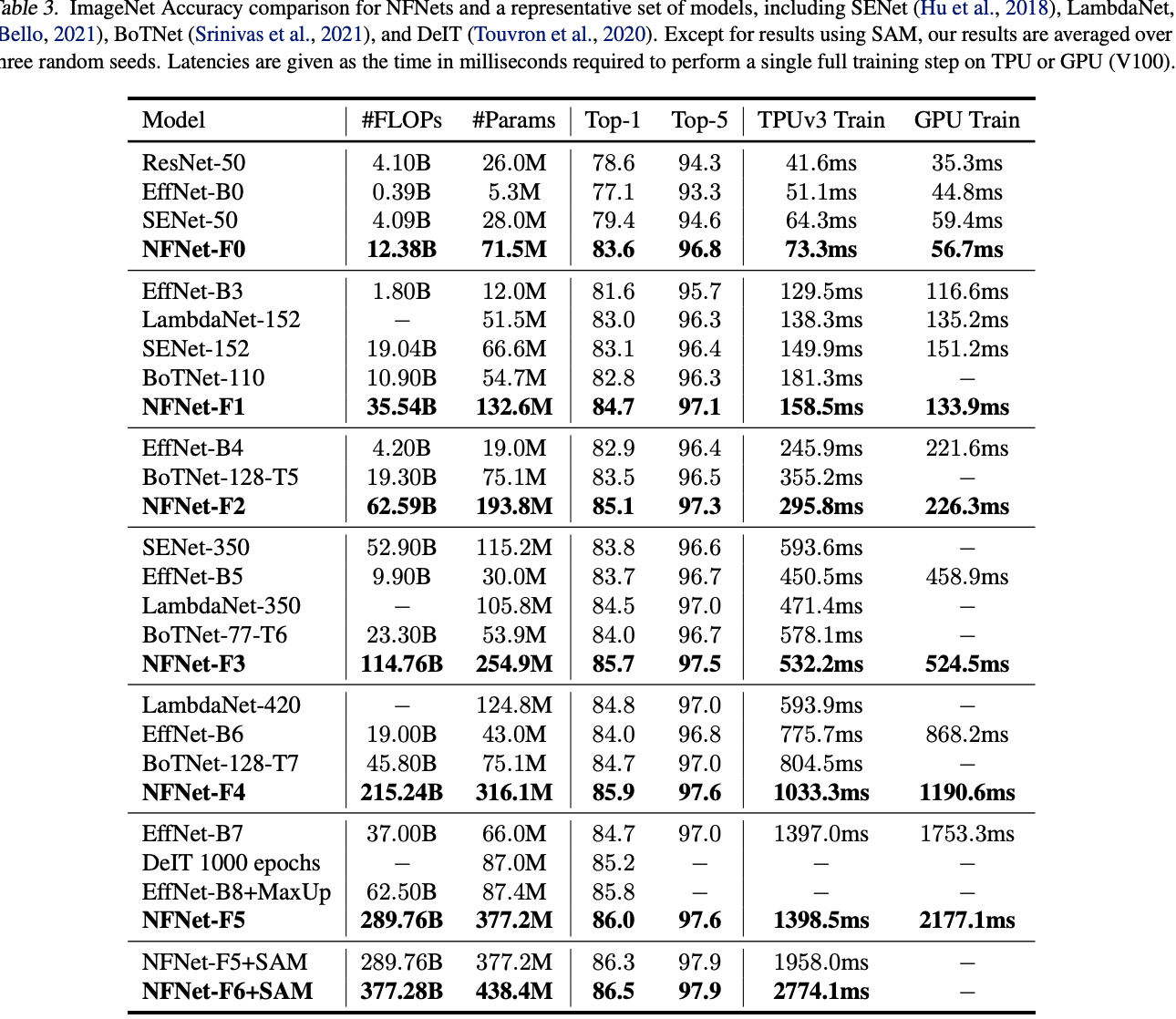
在ImageNet对比不同大小的网络的性能。
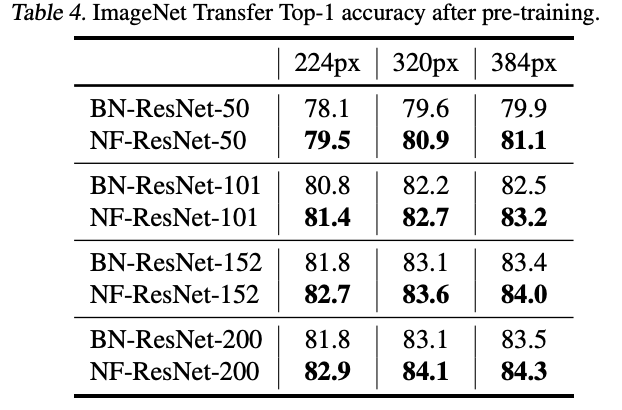
基于ImageNet的10 epoch预训练权重,进行NF-ResNet改造并Fine-tuning,性能如表4所示。
Conclusion
论文认为Batch Normalization并不是网络的必要构造,反而会带来不少问题,于是开始研究Normalizer-Free网络,希望既有相当的性能也能支持大规模训练。论文提出ACG梯度裁剪方法来辅助训练,能有效防止梯度爆炸,另外还基于NF-ResNet的思想将SE-ResNet改造成NFNet系列,可以使用4096的超大batch size进行训练,性能超越了Efficient系列。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
















 923
923











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









