






把下面的Enable勾上(在其他部分都没有出错的情况下可以试一下)
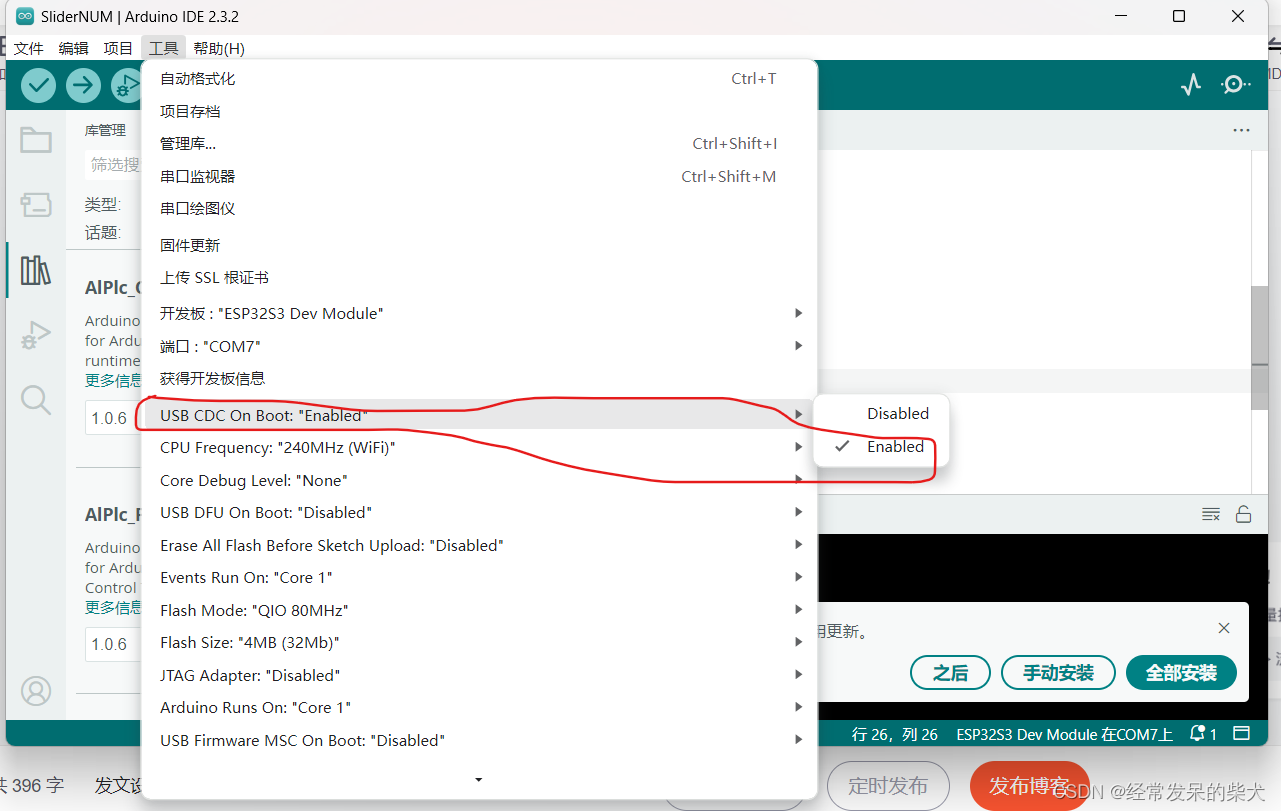
USB CDC(USB Communications Device Class)是一种 USB 设备类别,用于在计算机和外部设备之间进行通信。关于在启动时启用 USB CDC,你可能在嵌入式系统或者类似的环境中遇到这样的需求。
一般来说,要在启动时启用 USB CDC,你需要确保你的设备固件(如嵌入式系统或单片机)在启动时初始化 USB 控制器,并配置为作为 CDC 设备进行识别和通信。这通常涉及到编写相应的驱动程序或者使用现有的 USB CDC 驱动程序。
具体的步骤可能因设备类型、操作系统和开发工具而异,但通常包括以下几个方面:
- 在设备固件中初始化 USB 控制器。
- 配置 USB 控制器为 CDC 设备。
- 实现 CDC 协议所需的通信接口(如虚拟串口)。
- 确保主机端(如PC)可以正确识别并与设备通信。
如果你需要更具体的帮助,建议查阅相关的硬件/设备手册、USB CDC 规范文档以及相关的开发资源和社区论坛,以获取针对你的具体环境和需求的指导。

















 8623
8623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









