







1. 移动机器人(两轮差动)的运动方程
p˙(t)=⎛⎝⎜x˙(t)y˙(t)θ˙(t)⎞⎠⎟=⎛⎝⎜cosθ(t)sinθ(t)0001⎞⎠⎟(v(t)w(t))
p(t)
— 机器人的运动轨迹,含在世界坐标系下的位置变化
x(t),y(t)
,朝向与世界坐标系
x
轴的夹角变化
v(t),w(t)
— 机器人的线速度与角速度
2. 轨迹偏差
Δp(t)=pd(t)−p(t)=⎛⎝⎜Δx(t)Δy(t)Δθ(t)⎞⎠⎟=⎛⎝⎜xd(t)−x(t)yd(t)−y(t)θd(t)−θ(t)⎞⎠⎟
e(t)=⎛⎝⎜ex(t)ey(t)eθ(t)⎞⎠⎟=⎛⎝⎜cosθ(t)−sinθ(t)0sinθ(t)cosθ(t)0001⎞⎠⎟Δp(t)
Δp(t)
— 轨迹偏差
e(t)
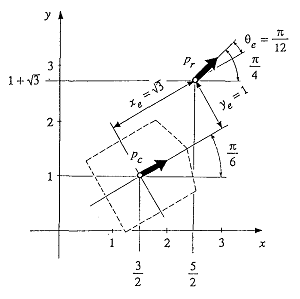
— 转换后的偏差,含义如下图(非配图,符号不同),图中的
(xe,ye,θe)
对应上式中的
e(t)
,
pr,pc
对应
pd(t),p(t)
。
第二个公式中的参数矩阵是满秩的,意味着若
e(t)
收敛于零,则
Δp(t)
收敛于零。
e(t)
对
t
求导:
以
ex(t)
为例证明上式(为表述方便,省去
(t)
):
ex=cosθ(xd−x)+sinθ(yd−y)
e˙x=−θ˙sinθ(xd−x)+θ˙cosθ(yd˙−y)=−eyw=−eyw−v=−eyw−v=−eyw−v=−eyw−v+vdcoseθ+cosθ(x˙d−x˙)+sinθ(y˙d−y˙)+x˙dcosθ−x˙cosθ+y˙dsinθ−y˙sinθ+x˙dcosθ+y˙dsinθ+x˙d(cosθdcoseθ+sinθdsineθ)+y˙d(sinθdcoseθ−cosθdsineθ)+(x˙dcosθd+y˙dsinθd)coseθ+(x˙dsinθd−y˙dcosθd)sineθ
其中:
x˙dcosθd+y˙dsinθd=vd
x˙dsinθd−y˙dcosθd=0
未完待续


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









