







最短路径 是数学中的一类问题,常常在 奥数比赛、计算机竞赛等场合出没,对应现实生活的问题就是 找一个从A点到B点的最短路,其价值和意义很明显。
常用的路径算法有:Dijkstra算法、A*算法、SPFA算法、动态规划法、Bellman-Ford算法和Floyd-Warshall算法 等等,这里我们只讲 最常用的Dijkstra算法。
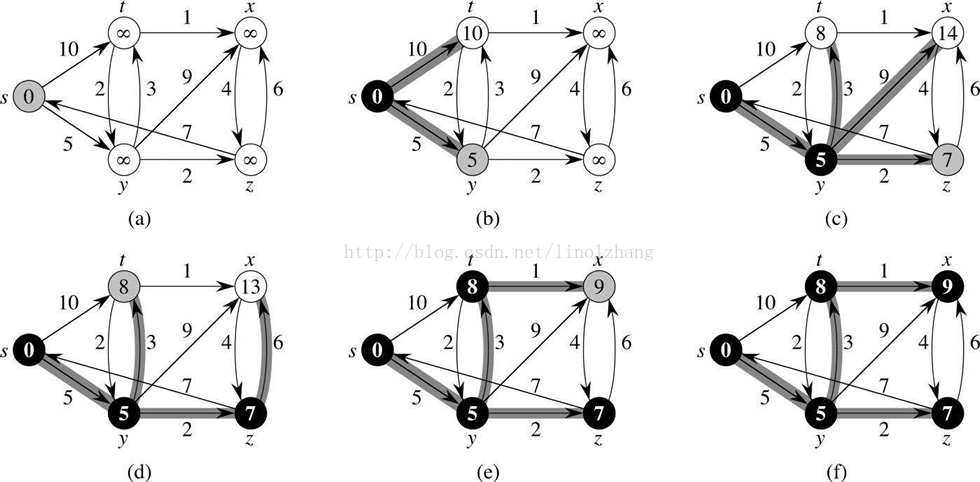
Dijkstra算法:
算法采用了贪心思想,即每次都查找与该点距离最近的点,其算法复杂度为 O(n^2)。
定义S描述已完成规划点集,U表示未完成规划点集,v表示源顶点,那么算法步骤可以描述为:
1. 初始化,S只含有源顶点v;
2. 从U中选取一个距离v最小的顶点k加入S中(该选定的距离就是v到k的最短路径长度);
3. 以k为新考虑的中间点,修改U中各顶点的距离;若从源节点v到顶点u的距离(经过顶点k)比原来距离(不经过顶点k)短,则修改顶点u的距离值,修改后的距离值是顶点k的距离加上k到u的距离;
4. 重复步骤 2、3,直到所有顶点都包含在S中。
代码参考:
头文件(SearchGraph.h)
/* SearchGraph类 - 最短路径搜索
linolzhang, 2009.6.22
*/
#include <vector>
#include <string>
#include <map>
#include <queue>
#include <functional>
#include <float.h>
// 边
struct Vertex;
struct Edge
{
Vertex* src; // s
Vertex* dest; // w
float weight;
Edge(Vertex* _src,Vertex* _dest,float w) : src(_src),dest(_dest),weight(w)
{
}
};
struct EdgeIndex // 用于边索引查找
{
std::string srcID;
std::string destID;
EdgeIndex(const std::string& _srcID,const std::string& _destID) : srcID(_srcID),destID(_destID)
{
}
bool operator < (const EdgeIndex& rhs) const
{
if(srcID != rhs.srcID)
return srcID < rhs.srcID;
return destID < rhs.destID;
}
};
struct QNode // 用于搜索
{
Vertex* vertex;
float dist;
QNode(Vertex* _vertex=NULL,float _dist=0.0f) : vertex(_vertex),dist(_dist)
{
}
bool operator < (const QNode& rhs) const { return dist<rhs.dist; }
bool operator > (const QNode& rhs) const { return dist>rhs.dist; }
};
// 每个顶点基本信息
struct Vertex
{
std::string ID; // 顶点ID
std::vector<Edge*> adjEdgeInList; // 入边列表
std::vector<Edge*> adjEdgeOutList; // 出边列表
float dist; // 与目标点的最短距离
Vertex* next; // 记录到目标最短路径中的 下一个顶点
bool bVisited; // 是否已访问
Vertex(const std::string& id) : ID(id),dist(FLT_MAX),next(NULL),bVisited(false)
{
};
void reset()
{
dist = FLT_MAX; next = NULL; bVisited = false;
}
};
// 搜索图类,记录有向边集合,Djkstra算法搜索最短路径
class SearchGraph
{
public:
SearchGraph(void);
~SearchGraph(void);
SearchGraph* clone(); // 克隆一个搜索图
public:
Vertex* addVertex(const std::string& id); // 添加顶点
Vertex* getVertex(const std::string& id); // 得到顶点
void removeVertex(const std::string& id); // 删除顶点,需要先删除其关联的边
bool addEdge(const std::string& srcID,const std::string& destID,float weight); // 添加边
Edge* getEdge(const std::string& srcID,const std::string& destID); // 得到边
void removeEdge(const std::string& srcID,const std::string& destID); // 删除边,首先解除与顶点的关联
// djkstra算法搜索最短路
bool getShortestPath(const std::string& vID,bool bFrom=true); // bFrom :从该点出发
protected:
std::map<std::string,Vertex*> m_VertexList; // 顶点列表
std::map<EdgeIndex,Edge*> m_EdgeList; // 边列表
};
cpp文件(SearchGraph.cpp)
#include "SearchGraph.h"
SearchGraph::SearchGraph(void)
{
}
SearchGraph::~SearchGraph(void)
{
// 删除顶点
std::map<std::string,Vertex*>::iterator ite_v = m_VertexList.begin();
for( ; ite_v != m_VertexList.end(); ++ite_v )
delete ite_v->second;
// 删除边
std::map<EdgeIndex,Edge*>::iterator ite_e = m_EdgeList.begin();
for( ; ite_e != m_EdgeList.end(); ++ite_e )
delete ite_e->second;
}
// 克隆一个搜索图
SearchGraph* SearchGraph::clone()
{
SearchGraph* newSearchGraph = new SearchGraph();
// 复制Vertex
std::map<std::string,Vertex*>::iterator ite_v = m_VertexList.begin();
for( ; ite_v != m_VertexList.end(); ++ite_v )
{
newSearchGraph->addVertex(ite_v->first);
}
// 复制Edge
std::map<EdgeIndex,Edge*>::iterator ite_e = m_EdgeList.begin();
for( ; ite_e != m_EdgeList.end(); ++ite_e )
{
newSearchGraph->addEdge(ite_e->first.srcID,ite_e->first.destID,ite_e->second->weight);
}
return newSearchGraph;
}
/
// --------------------------------------------
// 添加顶点
Vertex* SearchGraph::addVertex(const std::string& id)
{
// 首先查找顶点ID,是否存在
std::map<std::string,Vertex*>::iterator ite = m_VertexList.find(id);
if( ite != m_VertexList.end() )
{
Vertex* pVertex = ite->second;
return pVertex;
}
else
{
Vertex* pVertex = new Vertex(id);
m_VertexList[id] = pVertex;
return pVertex;
}
}
// 得到顶点
Vertex* SearchGraph::getVertex(const std::string& id)
{
// 查找顶点
std::map<std::string,Vertex*>::iterator ite = m_VertexList.find(id);
if( ite != m_VertexList.end() )
{
Vertex* pVertex = ite->second;
return pVertex;
}
return NULL;
}
// 删除顶点,需要先删除其关联的边
void SearchGraph::removeVertex(const std::string& id)
{
// 首先查找顶点ID,是否存在
std::map<std::string,Vertex*>::iterator ite = m_VertexList.find(id);
if( ite != m_VertexList.end() )
{
Vertex* pVertex = ite->second;
// 首先删除关联的边
for(size_t i=0;i<pVertex->adjEdgeInList.size();i++)
{
removeEdge(pVertex->adjEdgeInList[i]->src->ID,pVertex->adjEdgeInList[i]->dest->ID);
}
for(size_t i=0;i<pVertex->adjEdgeOutList.size();i++)
{
removeEdge(pVertex->adjEdgeOutList[i]->src->ID,pVertex->adjEdgeOutList[i]->dest->ID);
}
// 删除顶点
delete pVertex;
m_VertexList.erase(ite);
}
}
bool SearchGraph::addEdge(const std::string& srcID,const std::string& destID,float weight)
{
Vertex* pSrc = addVertex(srcID);
Vertex* pDest = addVertex(destID);
// 查找是否已添加
Edge* pEdge = getEdge(srcID,destID);
if(pEdge)
return false;
// 建立新边
pEdge = new Edge(pSrc,pDest,weight);
m_EdgeList.insert( std::pair<EdgeIndex,Edge*>(EdgeIndex(srcID,destID),pEdge) );
pSrc->adjEdgeOutList.push_back( pEdge );
pDest->adjEdgeInList.push_back( pEdge );
return true;
}
// 得到边
Edge* SearchGraph::getEdge(const std::string& srcID,const std::string& destID)
{
EdgeIndex index(srcID,destID);
// 查找边
std::map<EdgeIndex,Edge*>::iterator ite = m_EdgeList.find(index);
if( ite != m_EdgeList.end() )
{
Edge* pEdge = ite->second;
return pEdge;
}
return NULL;
}
// 删除边,首先解除与顶点的关联
void SearchGraph::removeEdge(const std::string& srcID,const std::string& destID)
{
EdgeIndex index(srcID,destID);
// 查找边
std::map<EdgeIndex,Edge*>::iterator ite = m_EdgeList.find(index);
if( ite != m_EdgeList.end() )
{
Edge* pEdge = ite->second;
// 首先解除与顶点的关联
std::vector<Edge*>::iterator ite1 = pEdge->src->adjEdgeOutList.begin();
for( ; ite1!=pEdge->src->adjEdgeOutList.end(); ++ite1 )
{
if( *ite1 == pEdge )
pEdge->src->adjEdgeOutList.erase(ite1); // 移除邻接边 - 出边
}
std::vector<Edge*>::iterator ite2 = pEdge->dest->adjEdgeInList.begin();
for( ; ite2!=pEdge->dest->adjEdgeInList.end(); ++ite2 )
{
if( *ite2 == pEdge )
pEdge->dest->adjEdgeInList.erase(ite2); // 移除邻接边 - 入边
}
// 删除边
delete pEdge;
m_EdgeList.erase(ite);
}
}
// djkstra算法搜索最短路 - bFrom:从该点出发
bool SearchGraph::getShortestPath(const std::string& vID,bool bFrom)
{
// 顶点是否存在 ?
std::map<std::string,Vertex*>::iterator ite = m_VertexList.find(vID);
if( ite == m_VertexList.end() )
return false;
Vertex* startVertex = ite->second;
// 重置搜索图,清空标记
ite = m_VertexList.begin();
for( ; ite!=m_VertexList.end(); ++ite )
ite->second->reset();
// 定义优先队列,greater最小堆 - 默认是最大堆less
std::priority_queue< QNode,std::vector<QNode>,std::greater<QNode> > q;
// 初始化,添加启始搜索顶点
startVertex->dist = 0;
QNode startNode(startVertex,0); // 初始节点,dist置0
q.push(startNode);
// ------------------------------------------
// 遍历
QNode currNode; // 当前遍历到的节点
while(!q.empty())
{
// 弹出栈顶最大 Dist 的节点
currNode = q.top(); q.pop();
// 过滤已访问过的情况
if(currNode.vertex->bVisited)
continue;
currNode.vertex->bVisited = true;
// 搜索方向控制
size_t adjEdgeCount = 0; // 邻接边数
if(bFrom) // 搜索点作为起始点
adjEdgeCount = currNode.vertex->adjEdgeOutList.size();
else // 搜索点作为终止点
adjEdgeCount = currNode.vertex->adjEdgeInList.size();
// 遍历邻接边
for( size_t i=0; i<adjEdgeCount; i++ )
{
Edge* pEdge;
Vertex* pNextVertex;
if(bFrom)
{
pEdge = currNode.vertex->adjEdgeOutList[i]; // 出边
pNextVertex = pEdge->dest;
}
else
{
pEdge = currNode.vertex->adjEdgeInList[i]; // 入边
pNextVertex = pEdge->src;
}
// 过滤已访问过的情况 - 不加也可以,通过距离判断
if(pNextVertex->bVisited)
continue;
// 如果 目标顶点 到 开始顶点 的距离 大于
// 以 当前节点 为中介的路径长度(当前节点dist+边weight),需要更新最短路
if( pNextVertex->dist > currNode.dist+pEdge->weight )
{
pNextVertex->dist = currNode.dist + pEdge->weight;
pNextVertex->next = currNode.vertex; // 记录前驱
q.push( QNode(pNextVertex,pNextVertex->dist) );
}
}
}
// 搜索完成,返回
return true;
}














 1379
1379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









