









 本文深入解析A*算法原理及其在八数码问题中的应用,介绍启发式函数设计、open与close表维护,并提供代码实现,帮助读者掌握A*算法精髓。
本文深入解析A*算法原理及其在八数码问题中的应用,介绍启发式函数设计、open与close表维护,并提供代码实现,帮助读者掌握A*算法精髓。
A*算法
1 前言
\qquad 八数码问题可以说得上是搜索问题中比较经典的,可以有很多种搜索策略,比如说有最常见的BFS,DFS,此外,A也是一个比较普遍的搜索算法。在八数码问题A往往可以得到最优的求解路径。(再也不用担心不会拼图了,哈哈哈
插播个文章推广,喜欢搜索话题可以订阅基于博弈树的开源五子棋AI教程及源码分享,里面详细的介绍了如何从零打造一个可玩性较高的五子棋AI,以及整个项目源码的分享
2 简介
\qquad
可能还有很多没有对A很深的理解,以下是自己的一些小看法。
\qquad
A算法作为启发式搜索的一种,第一个必不可少是启发式函数;同时作为A*算法的比较显著的一个特点就是对open表和close表的维护.
2.1 启发式函数
\qquad
启发式函数为f(n) = g(n) + h(n)
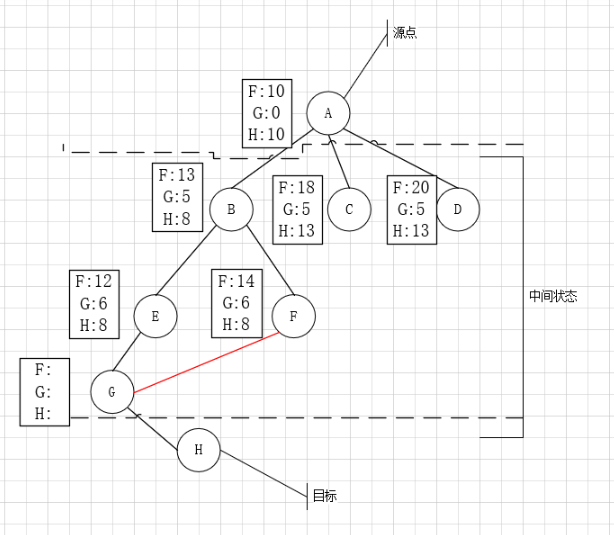
其中F为Final Score,代表A*算法衡量该节点最终值。G为Goal,计算了从起始节点到该节点的实际消耗。H为Heuristic Score,预估了当前节点到目标节点的消耗。
\qquad
启发式函数听起来很有学问,其实可以很简单的理解为从源点到目标的所需要消耗的总代价f(n)(和适应度函数比较相像),这个总代价可以分成两个部分从源点到中间节点(搜索的中间状态)已经消耗的实际代价g(n),另一个部分就是对从中间节点到目标的预测h(n)。
\qquad
通常来说,这里的代价一般是指各种距离,像欧式距离,曼哈顿距离等等,这个根据你所求解的实际问题决定。
\qquad
另一个值得指出的就是预测,预测值直接影响了问题求解的效率以及能否求得合理的解。这里给出一个结论:对于任意预测值h(n)均小于等于实际值的话,我们可以说最终解就是问题的最优解。
2.2 open表与close表的维护
open表:先可以简单认为是一个未搜索节点的表
close表:先可以简单认为是一个已完成搜索的节点的表(即已经将下一个状态放入open表内)
\qquad
规则一:对于新添加的节点S(open表和close表中均没有这个状态),S直接添加到open表中
\qquad
规则二:对于已经添加的节点S(open表中并且close表中没有这个状态),若在open表中,与原来的状态
S
0
S_{0}
S0的f(n)比较,取最小的一个。
\qquad
规则三:下一个搜索节点的选择问题,选取open表中f(n)的值最小的状态作为下一个待搜索节点
\qquad
规则四:每次需要将带搜索的节点下一个所有的状态按照规则一二更新open表,close表,搜索完该节点后,移到close表中。
2.3 算法
初始化:将起始节点添加到开放列表中。
循环执行以下步骤:
1 从开放列表中找出F评分最低的节点,将其设为当前节点。
2 检查当前节点是否是目标节点。如果是,则算法结束,路径被找到。
3 将当前节点移至关闭列表,并处理所有邻近节点:
4 如果邻近节点不在开放列表中,计算其G、H和F值,然后将其添加到开放列表。
5 如果邻近节点已在开放列表中,检查通过当前节点到达它的路径是否更好。如果更好,更新其F、G和H值。
2.4 实例演示
按照上述规则我们来体验一次简单的A*算法
- A添加到open表中,更新A的f(n)为10
open 表 :A(10)
close表 :null - 将B,C,D按照规则一添加到open表中,更新好B,C,D的f(n)后,将A移到close表中
open 表 :B(13) C(18) D(20)
close表 :A(10) - 依据规则三,选取节点B作为下一个节点,同理将E,F移到open表,B移到close表
open 表 :C(18) D(20) E(12) F(14)
close表 :A(10) B(13) - 依据规则三,选取E作为下一个节点,同理将G移到open表,E移到close表
open 表 :C(18) D(20) F(14) G(15)
close表 :A(10) B(13) E(12) - 依据规则三,选取F作为下一个节点,按照规则二G(13) < G(15) 更新open表中的G。F移到close表
open 表 :C(18) D(20) G(13)
close表 :A(10) B(13) E(12) F(14) - 继续搜索直至发现目标状态f(n)为open表中最小值
3 八数码问题
这里需要说明的A能找到的解是局部最优解,但是独特的启发式函数可以使得解为全局最优解,八数码问题就是一个能通过A求得最优解的问题。
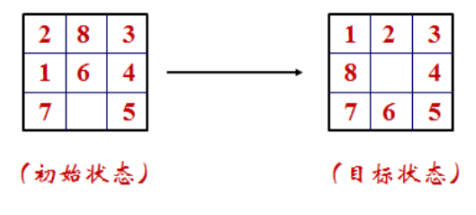
像下图所示,通过将数字位向空格位移动直至将棋盘从初始状态变化到目标状态。
4 问题分析
- 启发式函数的确定
h(n):已经移动的步数
g(n):此状态与目标状态九宫格中相异数字的个数 - 状态保存
\qquad A*算法有个很大的问题就是消耗内存资源,我们可以用char型数据保存,这里我另一种保存策略:用一个long int数值表示,方法如下
0-8九个状态可以四位二进制数来表示0000B-1000B,所以九个状态就可以用36个二进制位来表示,然后这36位二进制数就可以用一个long int型数据来表示,这样增加编码和解码工作,不过操作很风骚,位运算很好实现,只是这是后来想到的,没有实现 - 算法优化
\qquad 在找最小值的时候,我们可以用二分查找,o(n)优化到o(logn),这就要求我们再插入时顺序插入,因为查询次数是要大于添加open\close表项的,所以这个方法是可以优化执行效率的 - 无解情况
\qquad 将九宫格变成线性后,计算初始状态和目标状态的奇偶性是否一致,一致有解,否则无解。
5 代码实现
原始代码实现
5.1 原始代码
#include <iostream>
#include <vector>
#include <ctime>
#include <cstdlib>
#define maxState 10000
#define N 3
using namespace std;
//判定状态b是否与状态空间下标为n的相同
bool isEqual(int stateSpace[N][N][maxState],int stateB[N][N],int n)
{
for(int i = 0;i < N;i ++){
for(int j = 0;j < N;j ++){
if(stateSpace[i][j][n] != stateB[i][j]) return false;
}
}
return true;
}
//判定状态b是否与状态a相同
bool isEqual(int stateA[N][N],int stateB[N][N])
{
for(int i = 0;i < N;i ++){
for(int j = 0;j < N;j ++){
if(stateA[i][j] != stateB[i][j]) return false;
}
}
return true;
}
//启发估计,就是求start->target的H值过程
int evalute(int start[N][N],int target[N][N])
{
int num = 0;
for(int i = 0;i < N;i ++){
for(int j = 0;j < N;j ++)
if(start[i][j] != target[i][j]) num ++;
}
return num;
}
//状态转移函数
//stateA中的空位经dir方向的唯一得到stateB
bool move(int stateA[N][N],int stateB[N][N],int dir)
{
//1 up 2 down 3 left 4 right
int x = 0,y = 0;
for(int i = 0;i < N;i ++){
for(int j = 0;j < N;j ++){
stateB[i][j] = stateA[i][j];
if(stateA[i][j] == 0) {
x = i;y = j;
}
}
}
if(x == 0 && dir == 1) return false;
if(x == N-1 && dir == 2) return false;
if(y == 0 && dir == 3) return false;
if(y == N-1 && dir == 4) return false;
if(dir == 1){stateB[x-1][y] = 0;stateB[x][y] = stateA[x-1][y];}
else if(dir == 2){stateB[x+1][y] = 0;stateB[x][y] = stateA[x+1][y];}
else if(dir == 3){stateB[x][y-1] = 0;stateB[x][y] = stateA[x][y-1];}
else if(dir == 4){stateB[x][y+1] = 0;stateB[x][y] = stateA[x][y+1];}
else return false;
return true;
}
//状态追加函数
//stateA保存在状态空间下标为n的位置
void appendState(int stateSpace[N][N][maxState],int stateA[N][N],int n)
{
for(int i = 0;i < N;i ++){
for(int j = 0;j < N;j ++){
stateSpace[i][j][n] = stateA[i][j];
}
}
}
//状态提取函数
//提取状态空间下标为n的位置保存在stateA
void getState(int stateSpace[N][N][maxState],int stateA[N][N],int n)
{
for(int i = 0;i < N;i ++){
for(int j = 0;j < N;j ++){
stateA[i][j] = stateSpace[i][j][n];
}
}
}
//状态拷贝函数
//提取状态B保存在stateA
void statecpy(int stateA[N][N],int stateB[N][N])
{
for(int i = 0;i < N;i++){
for(int j = 0;j < N;j++)
stateA[i][j] = stateB[i][j];
}
}
//状态查找函数
//查询状态A保存在状态空间中
int findState(int stateSpace[N][N][maxState],int stateA[N][N],int n)
{
for(int i = 0;i < n;i ++){
if(isEqual(stateSpace,stateA,i)) return i;
}
return -1;
}
int Astar(int stateSpace[N][N][maxState],int start[N][N],int target[N][N],int path[maxState])
{
//初始化open,close表 openCloseList值为True时代表close表项,否则为open表项
bool openCloseList[maxState] = {false};
int FScore[maxState] = {0};
int GScore[maxState] = {0};
int curState[N][N];
statecpy(curState,start);
int id = 0,Curid = 0;
FScore[id] = evalute(curState,target);
appendState(stateSpace,start,id++);
while(!isEqual(curState,target)){
for(int i = 1;i < 5;i ++){//向四周找方向
int tmp[N][N] = {{0}};
if(move(curState,tmp,i)){
int state = findState(stateSpace,tmp,id);
if(state == -1){
//open表和close表中均无该项
path[id] = Curid;
GScore[id] = GScore[Curid] + 1;
FScore[id] = evalute(tmp,target) + GScore[id];
appendState(stateSpace,tmp,id++);
}else{
//open表有该项
int gscore = GScore[Curid] + 1,fscore = evalute(tmp,target) + gscore;
if(fscore < FScore[state]){
path[state] = Curid;
GScore[state] = gscore;
FScore[state] = fscore;
openCloseList[state] = false;
}
}
}
}
//当前节点添加到close表中
openCloseList[Curid] = true;
//找到open表中fscore最小的做为下一个带搜索节点
int minCur = -1;
for(int i = 0;i < id;i ++)
if(!openCloseList[i] && (minCur == -1 || FScore[i] < FScore[minCur])) minCur = i;
Curid = minCur;
getState(stateSpace,curState,Curid);
if(id == maxState) return -1;
}
return Curid;
}
void show(int stateSpace[N][N][maxState],int n)
{
cout << "-------------------------------\n";
for(int i = 0;i < N;i ++){
for(int j =0;j < N;j ++){
cout << stateSpace[i][j][n] << " ";
}
cout << endl;
}
cout << "-------------------------------\n";
}
int calDe(int stateSpace[N][N])
{
int sum = 0;
for(int i = 0;i < N*N;i ++){
for(int j = i+1;j < N*N;j ++){
int m,n,c,d;
m = i/N;n = i%N;
c = j/N;d = j%N;
if(stateSpace[c][d] == 0) continue;
if(stateSpace[m][n] > stateSpace[c][d]) sum ++;
}
}
return sum;
}
//由stateA通过随机移动自动生成新状态
void autoGenerate(int stateA[N][N])
{
int maxMove = 50;
srand((unsigned)time(NULL));
int tmp[N][N];
while(maxMove --){
int dir = rand()%4 + 1;
if(move(stateA,tmp,dir)) statecpy(stateA,tmp);
}
}
int main()
{
//1 定义状态空间
int stateSpace[N][N][maxState] = {{{0}}};
//2 初始化起点和终点
int start[N][N] = {{1,2,3},{4,5,6},{7,8,0}};
autoGenerate(start);
int target[N][N] = {{1,2,3},{4,5,6},{7,8,0}};
//3 检查一致性
if(!(calDe(start)%2 == calDe(target)%2)){
cout << "无解\n";
return 0;
}
//4 A*寻路
int path[maxState] = {0};
int res = Astar(stateSpace,start,target,path);
if(res == -1){
cout << "达到最大搜索能力\n";
return 0;
}
//5 重构路径
int shortest[maxState] = {0},j = 0;
while(res != 0){
shortest[j++] = res;
res = path[res];
}
//6 显示路径
cout << "第 0 步\n";
show(stateSpace,0);
for(int i = j - 1;i >= 0;i --){
cout << "第 " << j-i << " 步\n";
show(stateSpace,shortest[i]);
}
return 0;
}
5.2 优化后的代码
#include <iostream>
#include <queue>
#include <vector>
#include <ctime>
#include <cstdlib>
#include <functional>
#include <unordered_map>
#define BoardSize 3
#define DDirectionCount 4
#define InvalidKey 0
int directions[DDirectionCount][2] ={
{-1,0},{1,0},
{0,-1},{0,1}
};
struct hashNode
{
uint64_t m_key; //散列值
int m_FScore;//Final Score 总成本
int m_HScore;//Heuristic Score 启发式分数
int m_GScore;//Goal Score 消耗的实际分数
uint64_t m_ParentKey; // 父节点的键值
hashNode(uint64_t key, int FScore, int HScore, int GScore, uint64_t parentKey)
: m_key(key), m_FScore(FScore)
, m_HScore(HScore), m_GScore(GScore) , m_ParentKey(parentKey){}
};
namespace std {
template<>
struct hash<hashNode> {
size_t operator()(const hashNode& node) const {
return node.m_key;
}
};
}
//计算启发估计值
int calHeuristicScore(uint64_t stateKey,uint64_t targetKey)
{
//对应点位值不一致,启发估计值便加一
int num = 0;
uint64_t mask = 0b1111;
for(int posId = 0;posId < BoardSize*BoardSize; ++ posId){
if((stateKey & (mask << posId*4)) != (targetKey & (mask << posId*4))) ++ num;
}
return num;
}
//计算状态散列值,将二维数据按行展开,再以二进制码拼接成整数
uint64_t stateToHash(int state[BoardSize][BoardSize]){
uint64_t key = 0;
uint64_t shift = 0;
for(int row = 0; row < BoardSize; ++row){
for(int col = 0; col < BoardSize; ++col){
key |= ((uint64_t)state[row][col] << shift);
shift += 4;
}
}
return key;
}
//由状态散列值反推状态
void hashToState(int state[BoardSize][BoardSize], uint64_t key){
uint64_t shift = 0;
int mask = 0b1111;
for(int row = 0; row < BoardSize; ++row){
for(int col = 0; col < BoardSize; ++col){
// 从key中提取出4位,并赋值给state[row][col]
state[row][col] = (key >> shift) & mask;
shift += 4;
}
}
}
//状态转换
int posIdToPostion[9][2] = {
{0,0},{0,1},{0,2},
{1,0},{1,1},{1,2},
{2,0},{2,1},{2,2}
};
uint64_t stateMove(uint64_t key, int dir)
{
//获取空位
int posID = 0;
uint64_t mask = 0b1111;
for(; ((key&mask<<(posID*4)) >> (posID*4)) != 0 && posID < BoardSize*BoardSize; ++posID);
//获取移动后坐标以及ID
int newRow, newCol;
newRow = posIdToPostion[posID][0] + directions[dir][0];
newCol = posIdToPostion[posID][1] + directions[dir][1];
if(newRow < 0 || newRow >= BoardSize || newCol < 0 || newCol >= BoardSize) return InvalidKey;
int newPosID = newRow * BoardSize + newCol;
//求新的散列值
uint64_t newState = key;
// 设置新位置
newState &= ~(mask << (newPosID * 4));
// 设置旧位置
uint64_t num = ((key&mask<<(newPosID*4)) >> (newPosID*4));
newState |= num << (posID*4);
return newState;
}
int AStar(int start[BoardSize][BoardSize],int target[BoardSize][BoardSize],std::vector<uint64_t> &path)
{
//定义open表和close表
std::unordered_map<uint64_t, hashNode> openList;
std::unordered_map<uint64_t, hashNode> closeList;
uint64_t startKey = stateToHash(start);
uint64_t targetKey = stateToHash(target);
//初始化open表
uint64_t curKey = startKey;
int hScore = calHeuristicScore(startKey, targetKey);
int gScore = 0;
int fScore = hScore + gScore;
openList[curKey] = hashNode(curKey, fScore, hScore, gScore, curKey);
// 使用优先队列来存储待探索的节点,按照F分数排序
auto comp = [&openList](const uint64_t& a, const uint64_t& b) {
return openList[a].m_FScore > openList[b].m_FScore;
};
std::priority_queue<uint64_t, std::vector<uint64_t>, decltype(comp)> openPQ(comp);
openPQ.push(curKey);
while(!openPQ.empty() && curKey != targetKey){
//open表不为空 && 未找到目标节点
curKey = openPQ.top();
openPQ.pop();
for(int direciton = 0; direciton < DDirectionCount; ++ direciton){
uint64_t newState = stateMove(curKey, direciton);
//状态是合法且不在close表中
if(newState != InvalidKey && closeList.find(newState) == closeList.end()){
auto iter = openList.find(newState);
//更新当前状态分数
hScore = calHeuristicScore(newState, targetKey);
gScore = openList[curKey].m_GScore + 1;
fScore = hScore + gScore;
if(iter == openList.end() || fScore < openList[newState].m_FScore){
//更新规: 1 不在open表中 || 2 比open表中的值更优
openList[newState] = hashNode(newState, fScore, hScore, gScore, curKey);
openPQ.push(newState);
}
}
}
//将当前节点移入closeList
closeList[curKey] = openList[curKey];
//将当前节点移除openList
openList.erase(curKey);
}
//重构路径
uint64_t cur = targetKey;
while (cur != startKey) {
path.push_back(cur);
cur = closeList[cur].m_ParentKey; // 回溯父节点
}
path.push_back(startKey);
std::reverse(path.begin(), path.end()); // 反转路径以从起点开始
return 0;
}
int calDe(int state[BoardSize][BoardSize])
{
int sum = 0;
for(int i = 0;i < BoardSize*BoardSize;i ++){
for(int j = i+1;j < BoardSize*BoardSize;j ++){
int m,n,c,d;
m = i/BoardSize;n = i%BoardSize;
c = j/BoardSize;d = j%BoardSize;
if(state[c][d] == 0) continue;
if(state[m][n] > state[c][d]) sum ++;
}
}
return sum;
}
void show(uint64_t key,int id = -1)
{
std::cout << "------------No." << id << " Move-------------------\n";
uint64_t mask = 0b1111;
for(int posID = 0;posID < BoardSize*BoardSize; ++posID){
if(posID % BoardSize == 0) std::cout << std::endl;
std::cout << uint64_t(((key & (mask << (posID*4))) >> (posID*4))) << " ";
}
std::cout << std::endl;
std::cout << "-------------------------------\n";
}
void autoGenerate(int state[BoardSize][BoardSize])
{
int maxMove = 50;
srand((unsigned)time(NULL));
uint64_t curKey = stateToHash(state);
while(maxMove --){
int dir = rand()%DDirectionCount;
uint64_t tmpKey = stateMove(curKey,dir);
if(tmpKey != InvalidKey) curKey = tmpKey;
}
hashToState(state, curKey);
}
int main()
{
int start[BoardSize][BoardSize] = {{1,2,3},{4,5,6},{7,8,0}};
int target[BoardSize][BoardSize] = {{1,2,3},{4,5,6},{7,8,0}};
autoGenerate(target);
if(!(calDe(start)%2 == calDe(target)%2)){
std::cout << "no solve\n";
return 0;
}
std::vector<uint64_t> path;
AStar(start,target,path);
for(uint16_t id = 0;id < path.size(); ++id) show(path[id], id);
return 0;
}


















 4453
4453

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









