







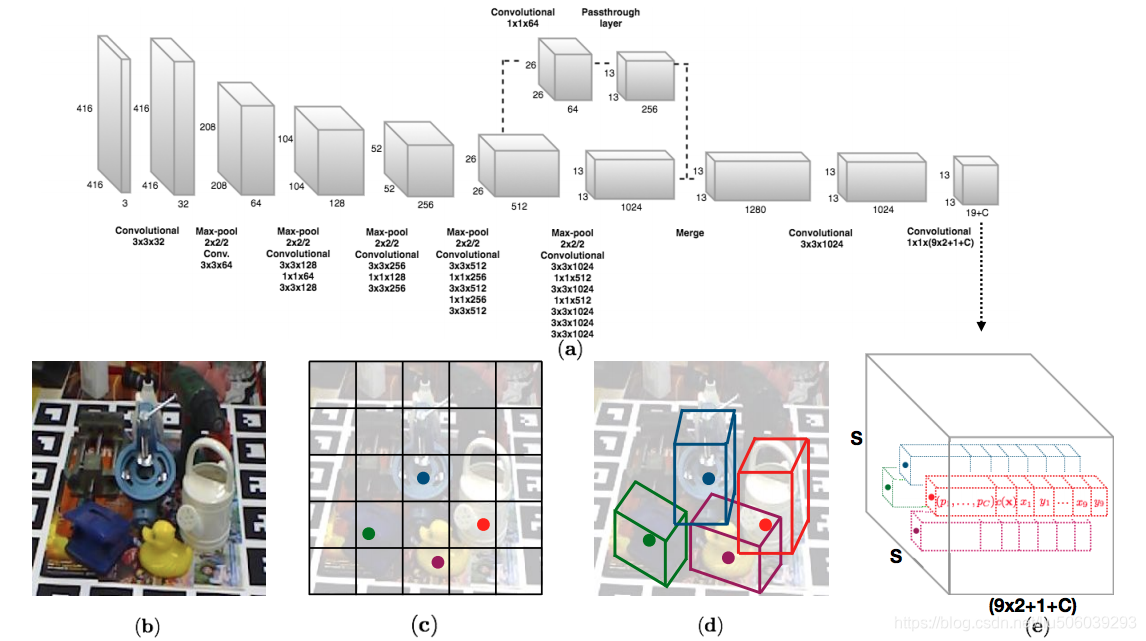
这个项目是Real-Time Seamless Single Shot 6D Object Pose Prediction", CVPR 2018. (https://arxiv.org/abs/1711.08848) 的开源代码实现
项目地址Microsoft/singleshotpose:https://github.com/Microsoft/singleshotpose
效果:
我的环境:ubuntu16.04 cuda9.0 cudnn5 anaconda
2019.3.13更新数据集
链接:https://pan.baidu.com/s/1IeLStUya1NHCYZ6yCgB-Gw
提取码:te6r
部署过程:
1.anaconda创建一个python2.7,名为pose的环境
conda create -n pose python=2.7
2.安装opencv-python,这里作者没有说明版本,安装默认的2.4版本可行
conda install --channel https://conda.anaconda.org/menpo opencv
3.安装numpy,scipy, PIL
conda install numpy
conda install scipy
conda install PIL
4.安装pytorch和torchvision
conda install pytorch==0.3.1
conda install torchvison
5.下载并且部署数据集
wget -O LINEMOD.tar --no-check-certificate "https://onedrive.live.com/download?cid=05750EBEE1537631&resid=5750EBEE1537631%21135&authkey=AJRHFmZbcjXxTmI"
wget -O backup.tar --no-check-certificate "https://onedrive.live.com/download?cid=0C78B7DE6C569D7B&resid=C78B7DE6C569D7B%21191&authkey=AP183o4PlczZR78"
wget -O multi_obj_pose_estimation/backup_multi.tar --no-check-certificate "https://onedrive.live.com/download?cid=05750EBEE1537631&resid=5750EBEE1537631%21136&authkey=AFQv01OSbvhGnoM"
wget https://pjreddie.com/media/files/VOCtrainval_11-May-2012.tar
wget https://pjreddie.com/media/files/darknet19_448.conv.23 -P cfg/
tar xf LINEMOD.tar
tar xf backup.tar
tar xf multi_obj_pose_estimation/backup_multi.tar -C multi_obj_pose_estimation/
tar xf VOCtrainval_11-May-2012.tar
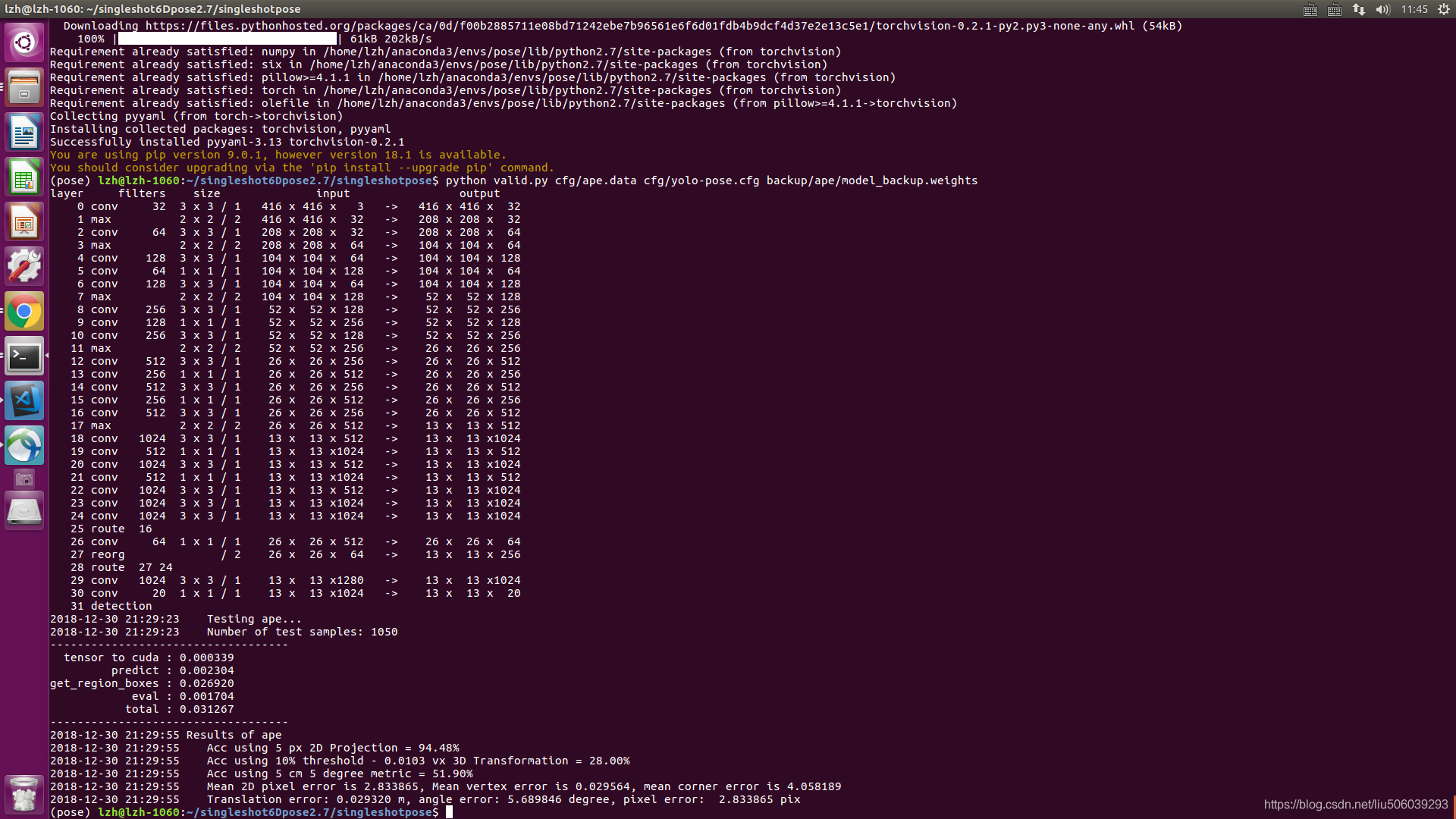
6.测试
python valid.py cfg/ape.data cfg/yolo-pose.cfg backup/ape/model_backup.weights
出现即可,error不是错误是误差
















 874
874











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









