






一、EEPROM和ICC介绍
1.串口通信中UART 和IIC区别
UART是有两个数据项RX ,TX,属于全双工,无时钟线异步串行通信
IIC 有两根线SCL时钟线和SDA数据线,由于只有一条数据线,是同步半双工通信。
2. AT24C64 芯片手册 器件操作时序
IIC通信协议
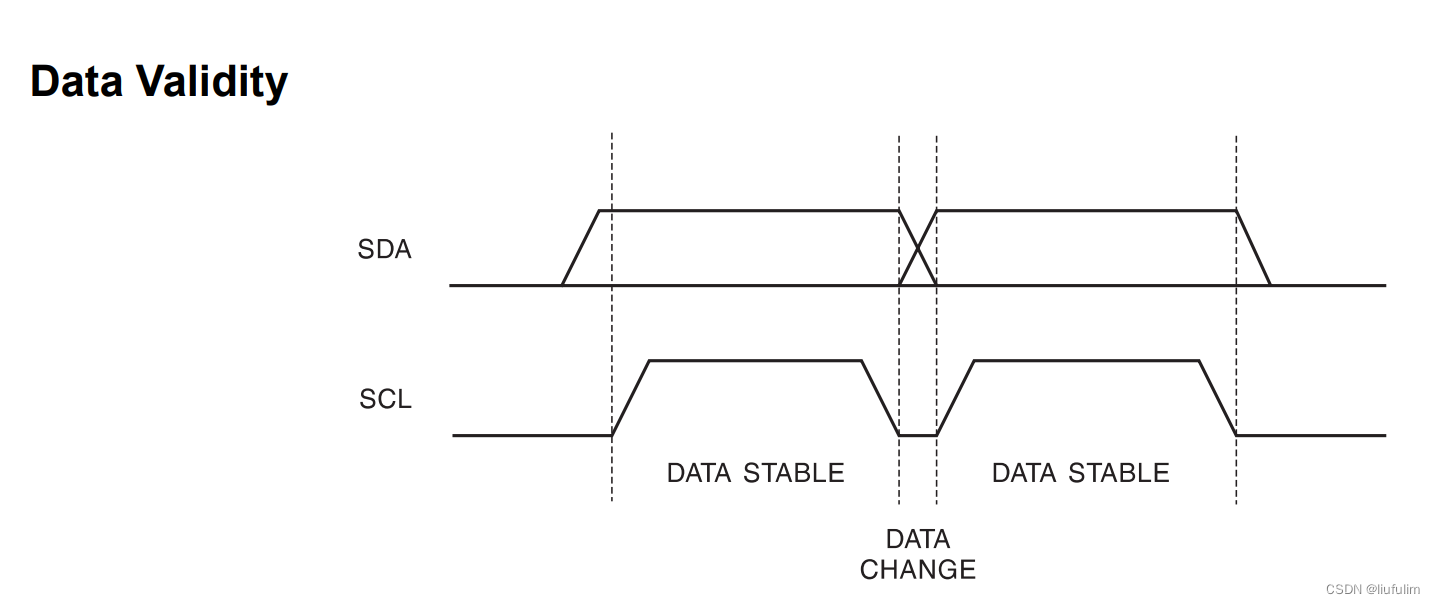
SDA是在SCL低电平时改变,当SCL为高电平时SDA保持数据稳定。
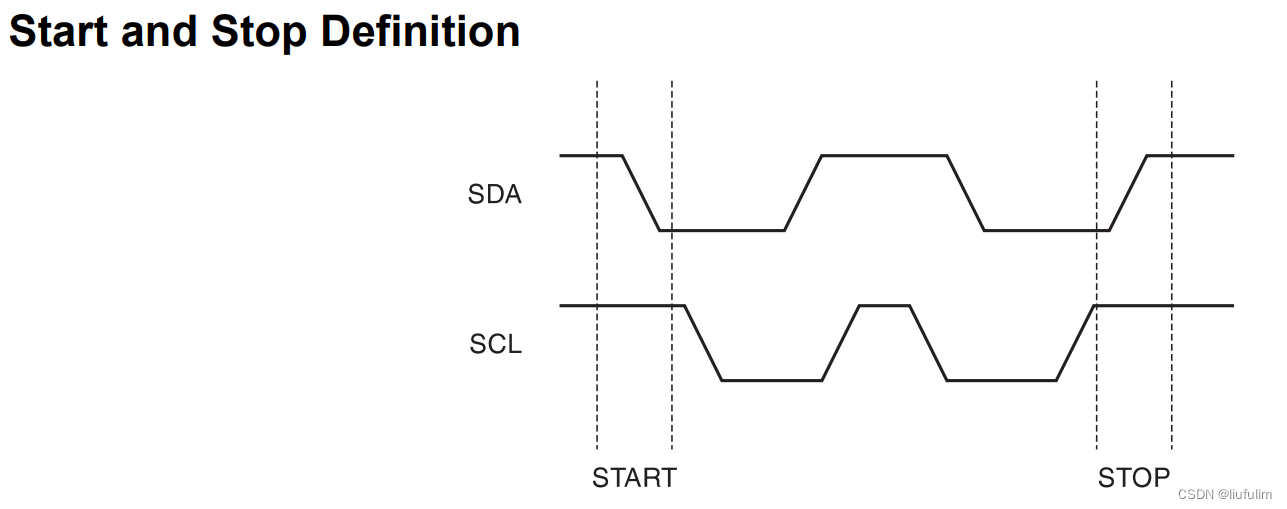
SCL为高电平时,SDA由高拉低是开始标志,传输完数据后由低拉高是结束标志。
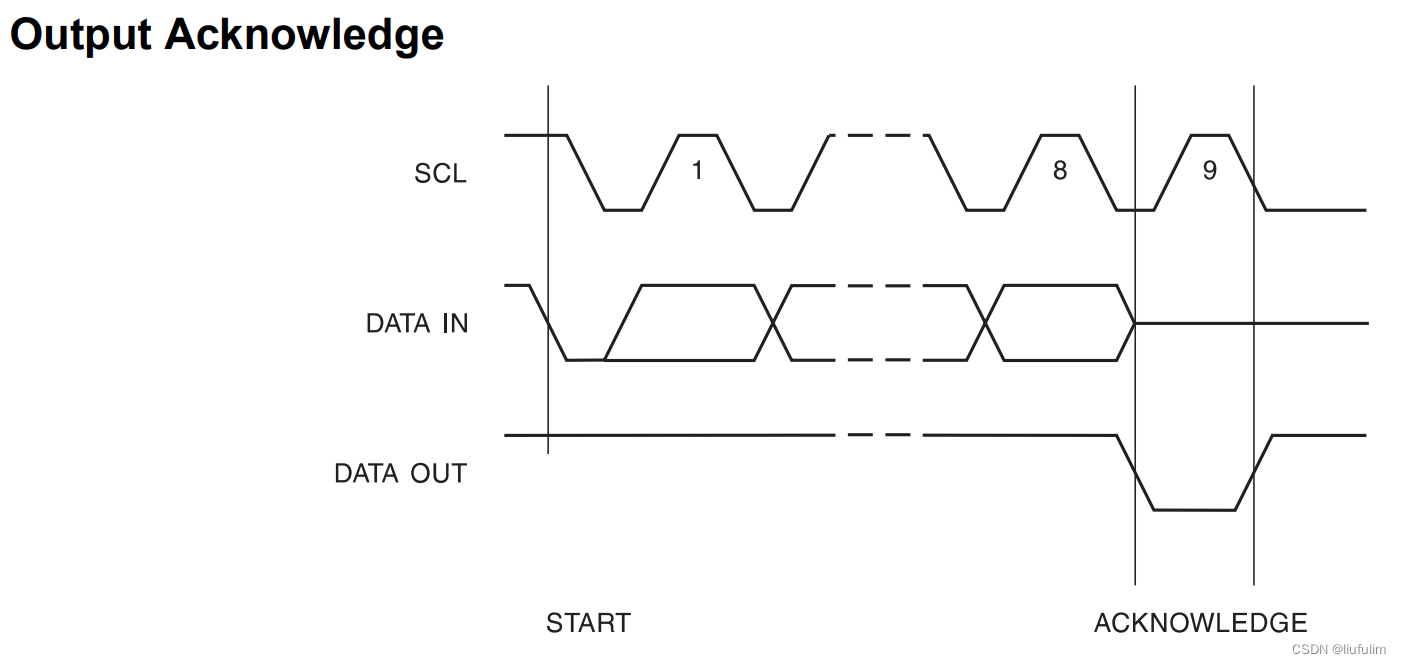
这个是应答位 输出完8bit数据后,输出一个低电平。当输出一直为高电平有可能是数据出错,SCL 频率太高等。
3.器件地址
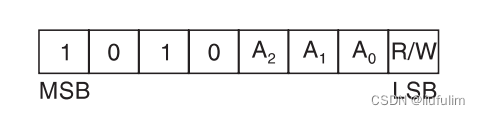
前四位是固定值,A2A1A0是可配置地址输入,最多供8个器件EEPROM组合,最后一位是读写控制位。1读0写。本次实验配置A2A1A0为000。
4.写操作
字节写
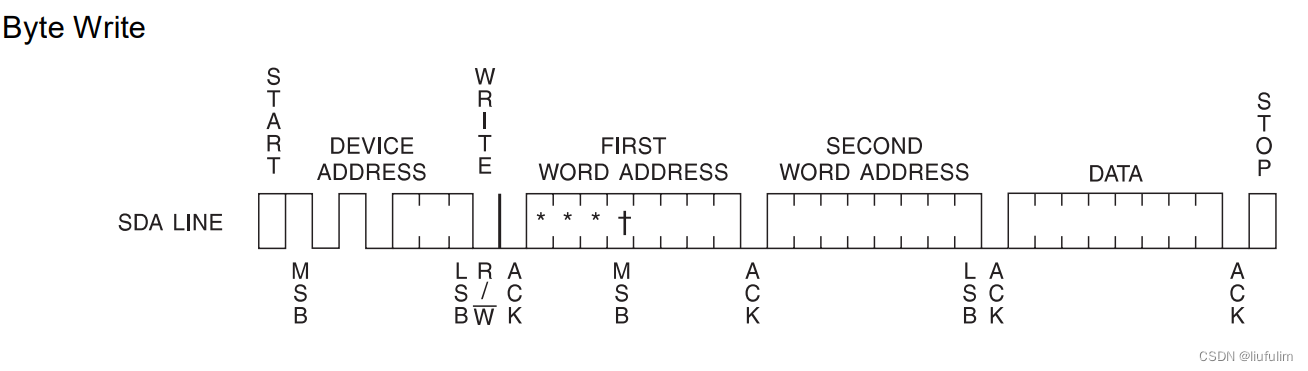
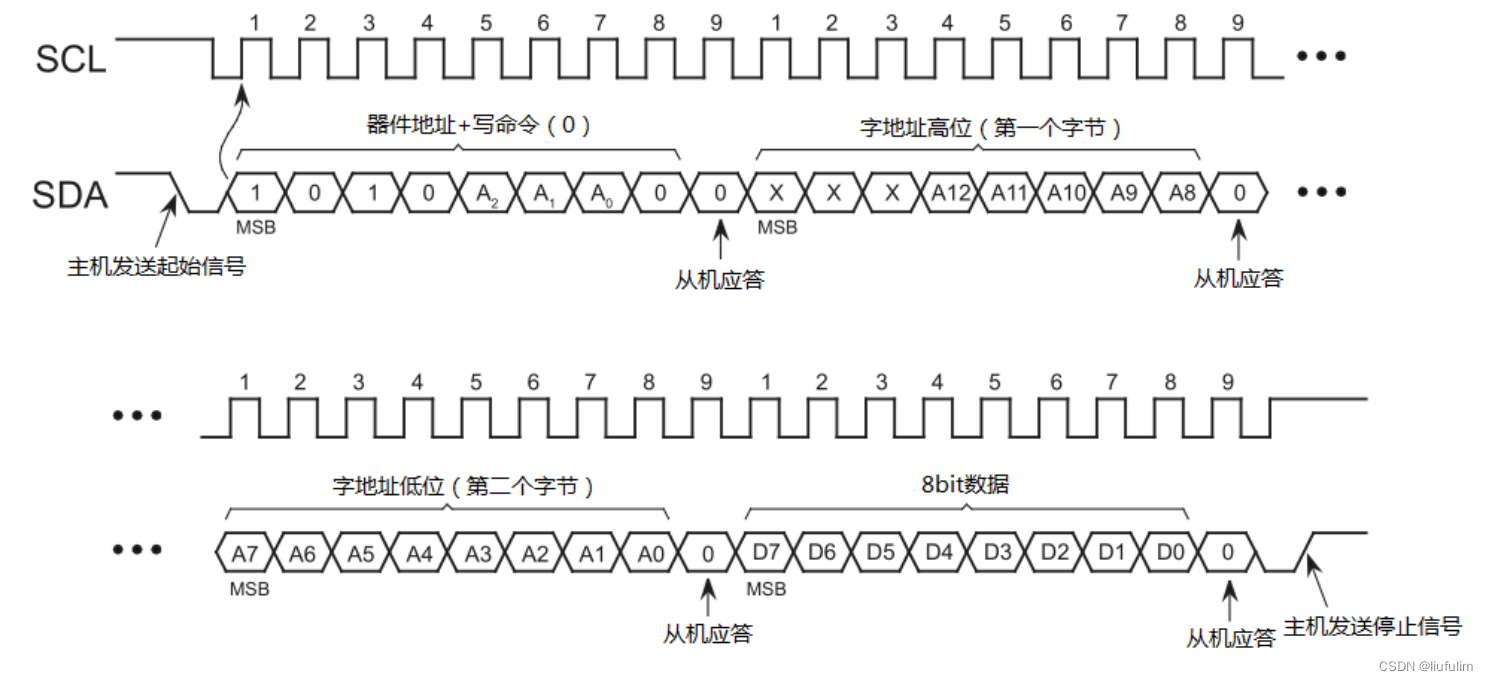
这个图略去了SCL时钟波形,根据上述器件操作时序可知,当SCL高电平时SDA拉低则表示数据START,然后在每个SCL低电平期间,数据改变一共输出8位1010A2A1A0+读写位,最后在SCL高电平期间输出一个响应位即SDA拉低。
硬件上就是开始到器件地址位由FPGA来控制,然后由EEPROM响应是否输出低电平响应。
字节地址位,*表示不关心位,+表示32k不关心,芯片是64k的所以要看设置为BIT_CTRL=1。
AT24C64 存储容量 为 64Kbit,内部分成 256 页,每页 32 字节,共有 8192 个字节,且其读写操作都是以字节为基本单位。可 以把 AT24C64 看作一本书,那么这本书有 256 页,每页有 32 行,每行有 8 个字,总共有 256*32*8=65536 个字,对应着 AT24C64 的 64*1024=65536 个 bit。8192=2^13,所以用13位来表示字节地址,当然每8位后还是有一个ACK。识别完器件地址和字节地址信息后,就开始写数据了,随后输出一个ACK和停止位。
页写
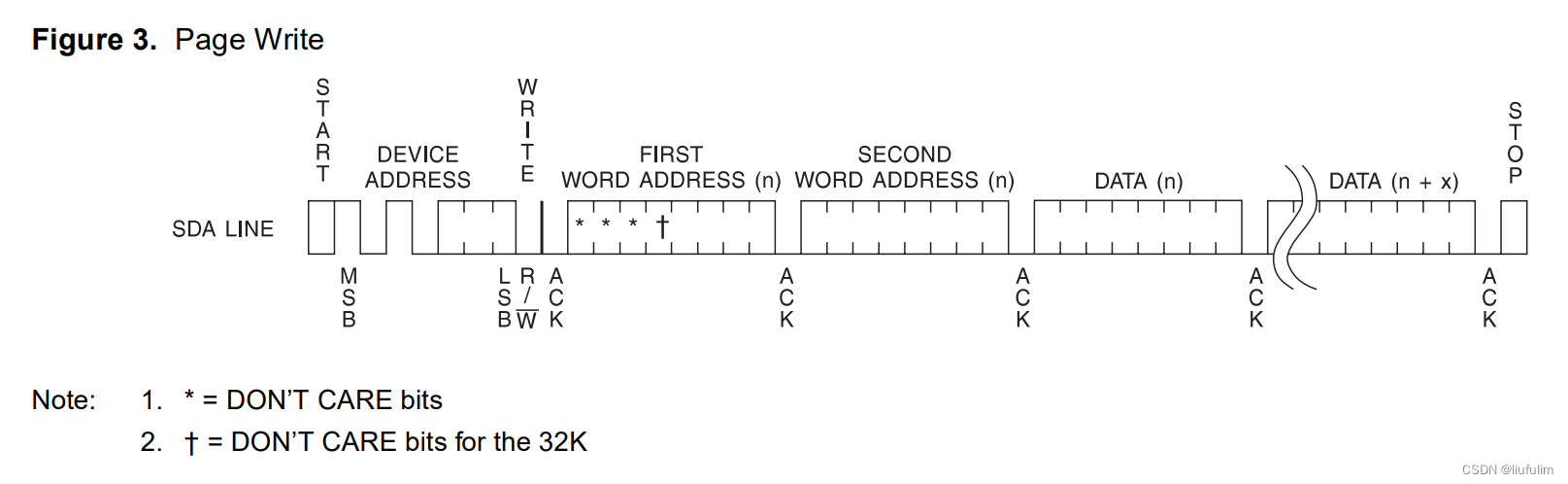
DATA一共写32个字节数据,然后再输出ACK和停止位。
显然如果数据多,用页写操作效率远大于字节写。
5.读操作
EEPROM支持三种读操作,当前地址读,随机地址读和顺序地址读。
顺序读中,读操作和写操作有一个很不同的地方。读到某一页最后字节会跳转到下一页,一直读到最后一页最后一个字节然后跳转到第一页第一个字节。写操作则是写到当前页最后一个字节时跳到当前页第一个字节。
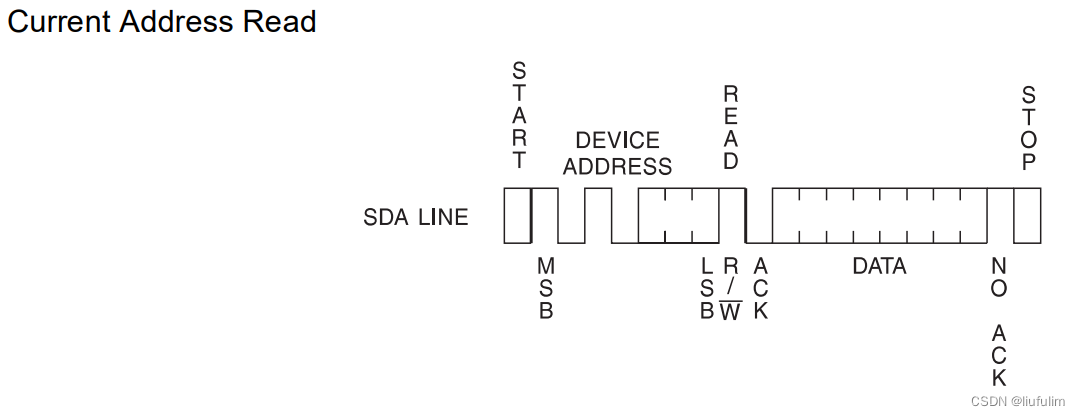
当前地址读好理解,最后不需要ACK信号。
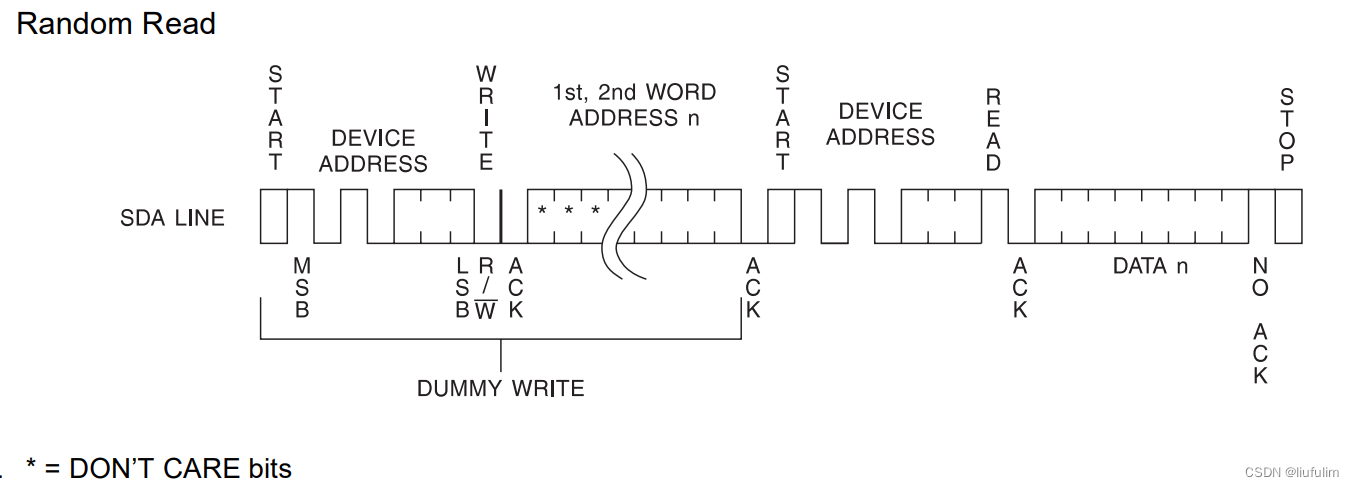
任意地址读则需要在都之前进行一次哑写,写入地址,然后读出该地址,同样没有ACK信号。
由于需要哑写,所以耗费时间
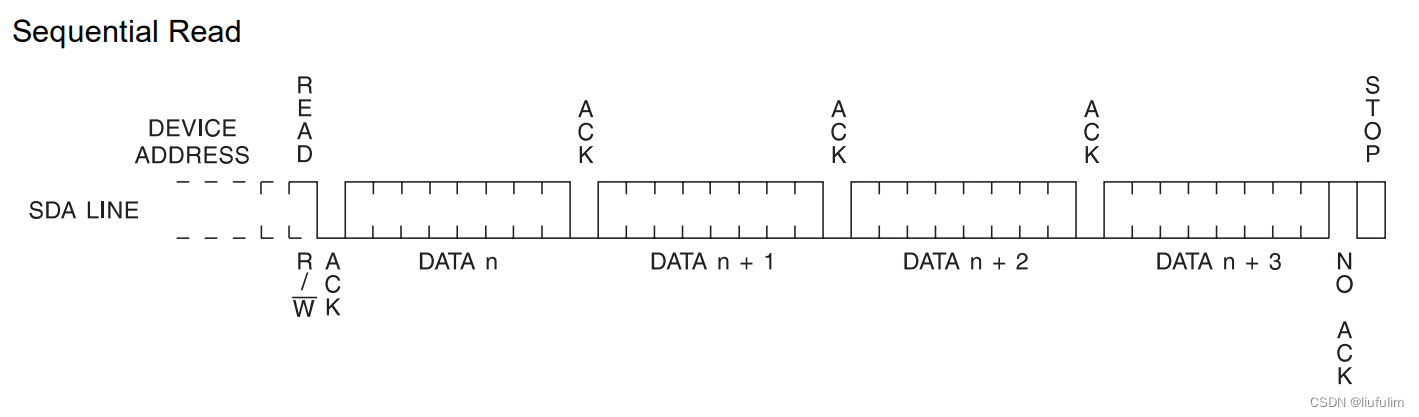
在当前地址读基础上主机不返回STOP
本次实验选择字节写和随机读的方式,也是为了后面实验直接调用本模块。
6.实验IIC读写协议选取
字节写
随机读

二、实验
1.实验任务
先给EEPROM 地址0-255写入数据0-255.之后再读取数据,若读取正确LED常亮否则闪烁。
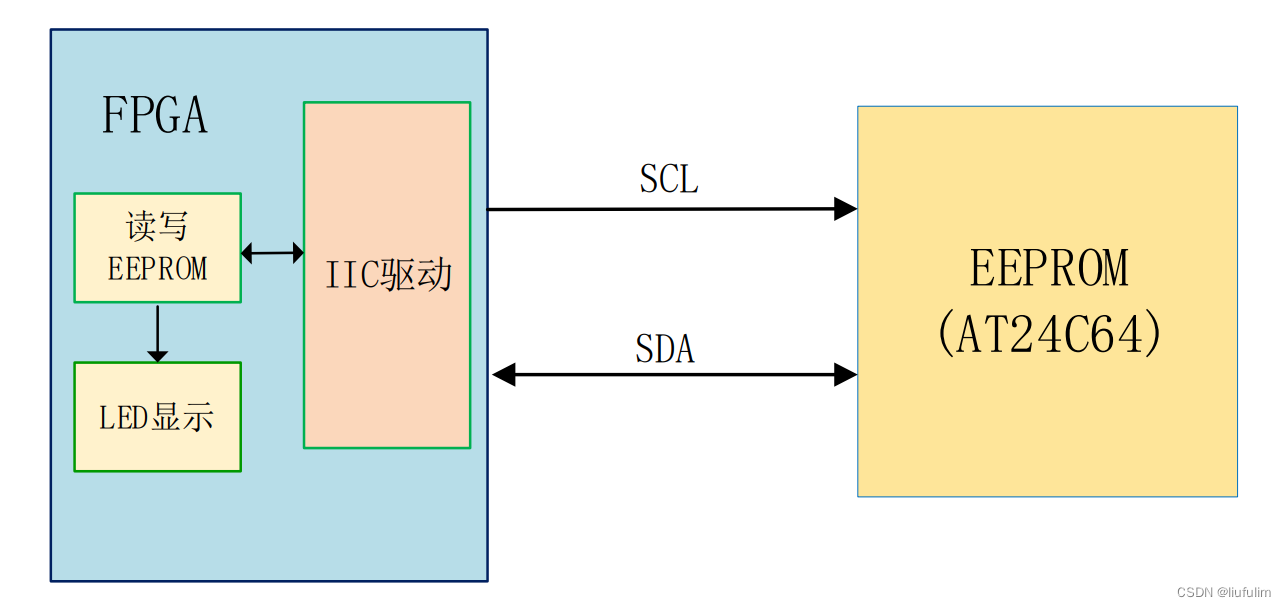
模块框架中就两条线SCL和SDA
2.原理图
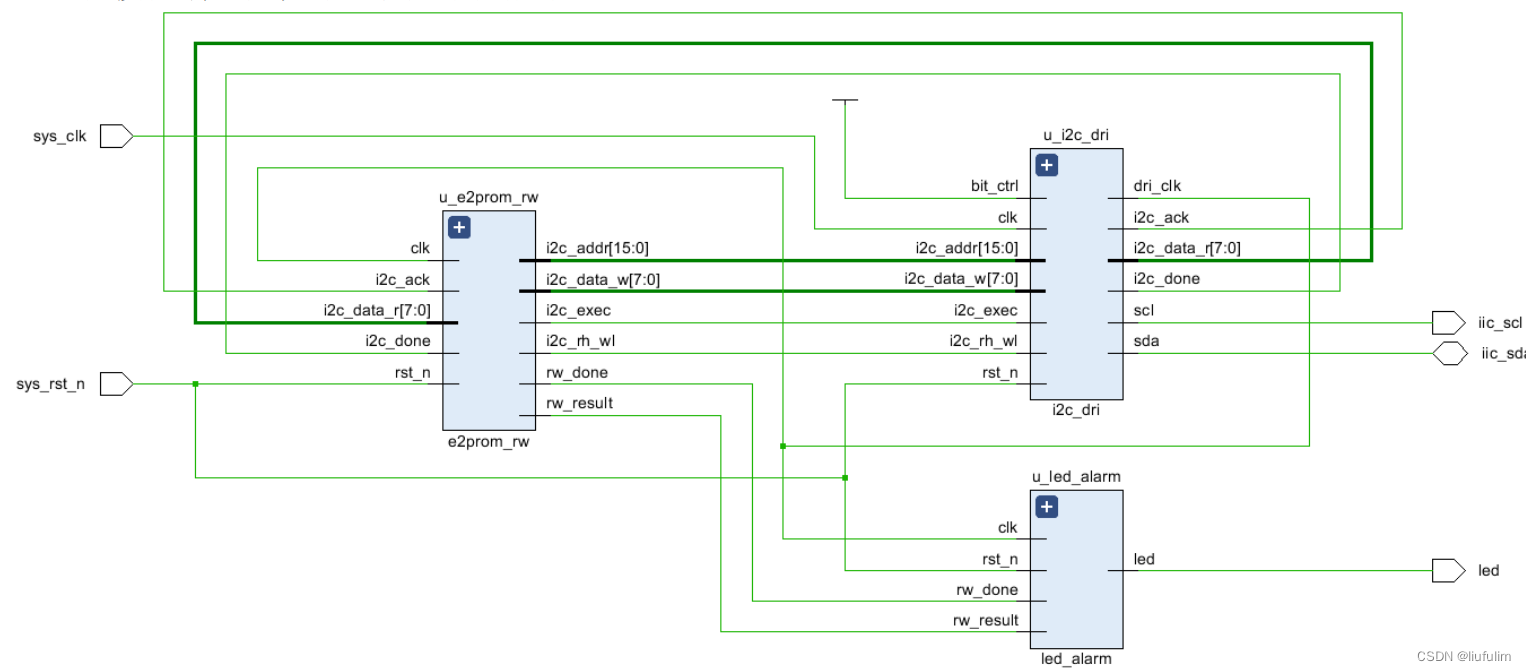
图中iic_sda是INOUT信号。
i2c_dri 为 I2C 驱动模块,用来驱动 I2C 的读写操作。当 FPGA 通过 EEPROM 读写模块 e2prom_rw 向 EEPROM 读写数据时,拉高 i2c 触发控制信号 i2c_exec 以使能 I2C 驱动模块,并使用读写控制信号 i2c_rh_wl 控制读写操作,当 i2c_rh_wl 为低电平时,I2C 驱动模块 i2c_dri 执行写操作,当 i2c_rh_wl 为高电平时,I2C 驱动模块 i2c_dri 执行读操作。此外,e2prom_rw 模块通过 i2c_addr 接口向 i2c_dri 模块输入器件字地址,通 过 i2c_data_w接口向 i2c_dri模块输入写的数据,并通过 i2c_data_r 接口读取 i2c_dri模块读到的数据。rw_done 信号是读写测试完成的标志,rw_result 是读写测试的结果。
3.i2c_dri程序设计
sda信号设计:它是一个INOUT信号,EEPROM是半双工,它只有一条数据线。所以用三态门设计读写分开操作
reg sda_dir ; //I2C数据(SDA)方向控制
wire sda_in ; //SDA输入信号
assign sda = sda_dir ? sda_out : 1'bz; //SDA数据输出或高阻
assign sda_in = sda ; //SDA数据输入dri_clk的设计:
驱动时钟dri要驱动SCL,SDA所以时钟频率要高,毕竟SDA在SCL低电平时候变化,所以dri_clk频率最好是SCL4倍以上。
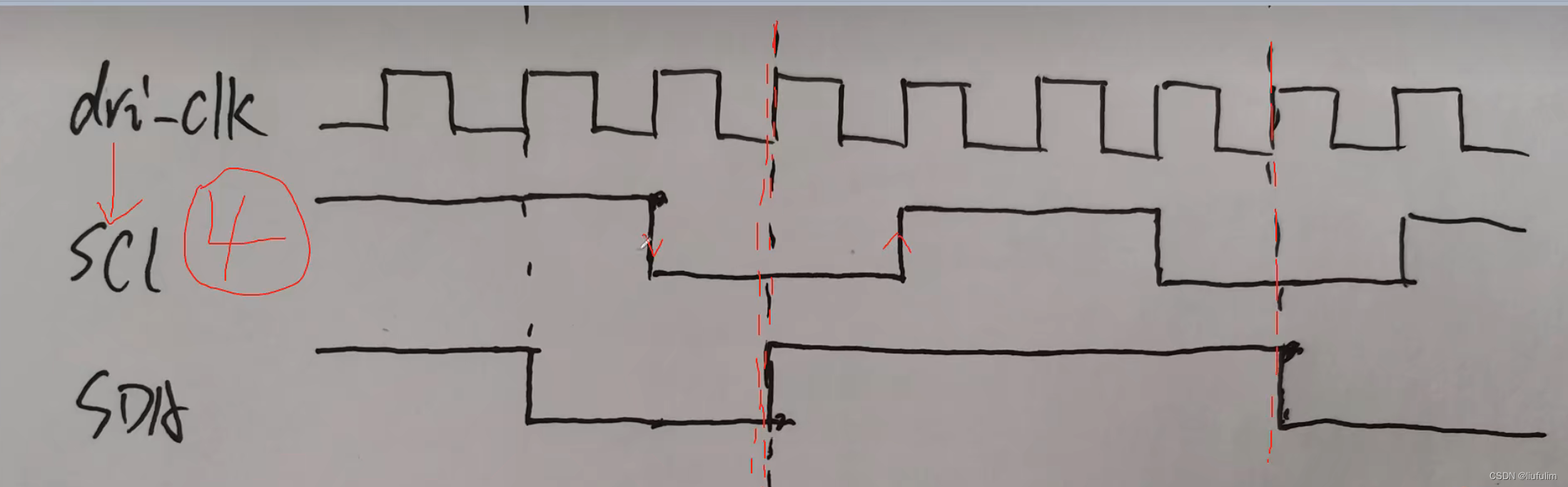
先求分频系数,系统时钟50MHZ除以I2C的时钟,可得I2C时钟分频系数,用一个计数器计数到这么多跳变一次的时钟就是I2C所需要的时钟频率的两倍。而dri_clk频率是其四倍,右移两位即除4。(计数为I2C的四分之一就跳变就是频率为其4倍)
assign clk_divide = (CLK_FREQ/I2C_FREQ) >> 2'd2;//模块驱动时钟的分频系数计数器模块如下:
//生成I2C的SCL的四倍频率的驱动时钟用于驱动i2c的操作
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
dri_clk <= 1'b0;
clk_cnt <= 10'd0;
end
else if(clk_cnt == clk_divide[8:1] - 1'd1) begin
clk_cnt <= 10'd0;
dri_clk <= ~dri_clk;
end
else
clk_cnt <= clk_cnt + 1'b1;
end要注意取[8:1]也是除2操作,因为分频系数只是求到那个跳变的计数,即一个周期的一半,故还要再除2,这样才是一个周期。减一1是从0开始计数。(当然这个仅适用于偶分频)
IP核也可以分频但是资源利用率会上升。
状态机的设计:
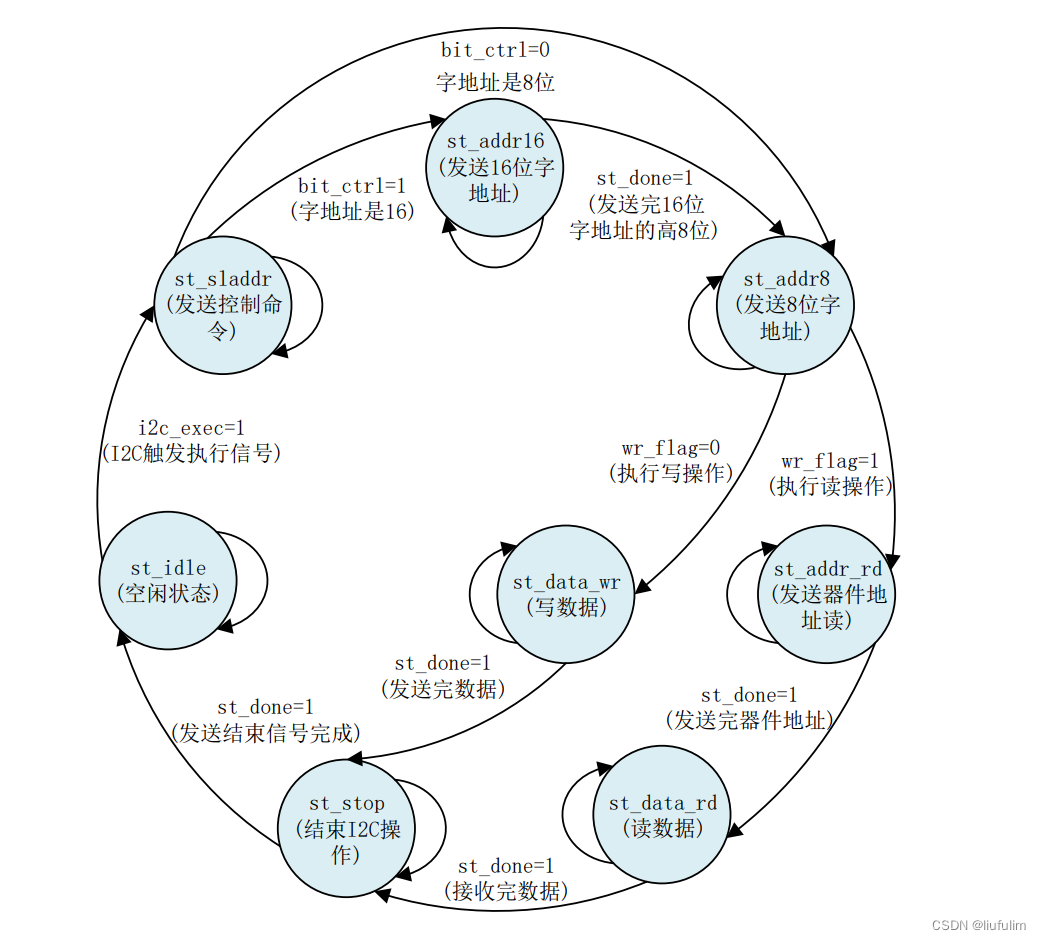
初始状态设为idle。
用三段式来设计
//localparam define
localparam st_idle = 8'b0000_0001; //空闲状态
localparam st_sladdr = 8'b0000_0010; //发送器件地址(slave address)
localparam st_addr16 = 8'b0000_0100; //发送16位字地址
localparam st_addr8 = 8'b0000_1000; //发送8位字地址
localparam st_data_wr = 8'b0001_0000; //写数据(8 bit)
localparam st_addr_rd = 8'b0010_0000; //发送器件地址读
localparam st_data_rd = 8'b0100_0000; //读数据(8 bit)
localparam st_stop = 8'b1000_0000; //结束I2C操作
reg [ 7:0] cur_state ; //状态机当前状态
reg [ 7:0] next_state; //状态机下一状态
reg st_done ; //状态结束
reg wr_flag ; //写标志1读0写
//(三段式状态机)同步时序描述状态转移
always @(posedge dri_clk or negedge rst_n) begin
if(!rst_n)
cur_state <= st_idle;
else
cur_state <= next_state;
end
//组合逻辑判断状态转移条件
always @(*) begin
next_state = st_idle;
case(cur_state)
st_idle: begin //空闲状态
if(i2c_exec) begin
next_state = st_sladdr;
end
else
next_state = st_idle;
end
st_sladdr: begin
if(st_done) begin
if(bit_ctrl) //判断是16位还是8位字地址
next_state = st_addr16;
else
next_state = st_addr8 ;
end
else
next_state = st_sladdr;
end
st_addr16: begin //写16位字地址
if(st_done) begin
next_state = st_addr8;
end
else begin
next_state = st_addr16;
end
end
st_addr8: begin //8位字地址
if(st_done) begin
if(wr_flag==1'b0) //读写判断
next_state = st_data_wr;
else
next_state = st_addr_rd;
end
else begin
next_state = st_addr8;
end
end
st_data_wr: begin //写数据(8 bit)
if(st_done)
next_state = st_stop;
else
next_state = st_data_wr;
end
st_addr_rd: begin //写地址以进行读数据
if(st_done) begin
next_state = st_data_rd;
end
else begin
next_state = st_addr_rd;
end
end
st_data_rd: begin //读取数据(8 bit)
if(st_done)
next_state = st_stop;
else
next_state = st_data_rd;
end
st_stop: begin //结束I2C操作
if(st_done)
next_state = st_idle;
else
next_state = st_stop ;
end
default: next_state= st_idle;
endcase
end需要注意的是,写数据不需要发送地址给EEPROM。读数据需要。
时序电路描述状态输出(得到状态转移所要的信号)
初始化
其实ACK信号作为应答,指的就是该EEPROM有没有得到主机的信号,比如器件地址
为1010000,如果主机发送0010000请求则得不到应答。即ACK信号一直为高电平
parameter SLAVE_ADDR = 7'b1010000 ; //EEPROM从机地址/时序电路描述状态输出
always @(posedge dri_clk or negedge rst_n) begin
//复位初始化
if(!rst_n) begin
scl <= 1'b1; //初始为高,因为在高电平下才有可能开始数据读写
sda_out <= 1'b1; //假定开始为写数据所以端口设定为输出
sda_dir <= 1'b1; //方向为写数据
i2c_done <= 1'b0;
i2c_ack <= 1'b0;
cnt <= 1'b0;
st_done <= 1'b0;
data_r <= 1'b0;
i2c_data_r<= 1'b0;
wr_flag <= 1'b0;
addr_t <= 1'b0;
data_wr_t <= 1'b0;
end 空闲状态描述
else begin
st_done <= 1'b0 ; //避免每次操作后还要去拉低,直接写在最上面,使其不操作时一直为0
cnt <= cnt +1'b1 ; //写在这里,如果不操作就会一直累加。
case(cur_state)
st_idle: begin //空闲状态
scl <= 1'b1;
sda_out <= 1'b1;
sda_dir <= 1'b1;
i2c_done<= 1'b0;
cnt <= 7'b0; //计数单独清0
if(i2c_exec) begin
wr_flag <= i2c_rh_wl ; //当驱动使能时,输入读写控制信号
addr_t <= i2c_addr ; //输入器件内地址
data_wr_t <= i2c_data_w; //要写的数据
i2c_ack <= 1'b0; //应答清0
end
end 接下来是发送控制命令状态和传送字地址,这一段可以画波形理解。基于IIC协议传送器件地址和数据字地址。还要输出st_done信号供状态跳转。同时注意要拉低最后SCL,让current状态跳转为下一个状态。
st_sladdr: begin //写地址(器件地址和字地址),主要是得到st_done信号给状态跳转
case(cnt)
7'd1 : sda_out <= 1'b0; //开始I2C(这里sda=sda_out,当其为低时,开始iic通信)
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= SLAVE_ADDR[6]; //传送器件地址
7'd5 : scl <= 1'b1; //画波形一目了然,在SCL低电平中间,SDA赋值。
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= SLAVE_ADDR[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= SLAVE_ADDR[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= SLAVE_ADDR[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= SLAVE_ADDR[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= SLAVE_ADDR[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= SLAVE_ADDR[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: sda_out <= 1'b0; //0:写
7'd33: scl <= 1'b1;
7'd35: scl <= 1'b0;
7'd36: begin
sda_dir <= 1'b0; //拉低,变成读操作,sda_out为高阻
sda_out <= 1'b1; //01都无所谓
end
7'd37: scl <= 1'b1;
7'd38: begin //从机应答
st_done <= 1'b1; //由于本实验用64k,需要13位,于是bit_ctrl=1。输出16位地址。
if(sda_in == 1'b1) //高电平表示未应答,读取EEPROM的应答状态
i2c_ack <= 1'b1; //拉高应答标志位 ,未应答
end
//不写else是因为初始化i2c_ack为0.也可以补上else啦
7'd39: begin
scl <= 1'b0; //需要再延迟一拍,当前状态才变为next_state
cnt <= 1'b0;
end
default : ;
endcase
end
st_addr16: begin
case(cnt)
7'd0 : begin
sda_dir <= 1'b1 ;
sda_out <= addr_t[15]; //传送字地址
end
7'd1 : scl <= 1'b1;
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= addr_t[14]; //卡在低电平中间变化
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= addr_t[13];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= addr_t[12];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= addr_t[11];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= addr_t[10];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= addr_t[9];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= addr_t[8];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_addr8: begin
case(cnt)
7'd0: begin
sda_dir <= 1'b1 ;
sda_out <= addr_t[7]; //字地址
end
7'd1 : scl <= 1'b1;
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= addr_t[6];
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= addr_t[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= addr_t[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= addr_t[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= addr_t[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= addr_t[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= addr_t[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end 写数据,主设备是FPGA写8位数据给E2PROM,所以是用sda_out,将要写的数据用同样的IIC协议写入。
st_data_wr: begin //写数据(8 bit)
case(cnt)
7'd0: begin
sda_out <= data_wr_t[7]; //I2C写8位数据
sda_dir <= 1'b1;
end
7'd1 : scl <= 1'b1;
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= data_wr_t[6];
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= data_wr_t[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= data_wr_t[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= data_wr_t[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= data_wr_t[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= data_wr_t[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= data_wr_t[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd33: scl <= 1'b1;
7'd34: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end 写地址进行读数据,共两步,我们选的是任意地址读,首先写入地址数据以便读数据。在SCL高电平期间,sda_out由高变低。重新开始写地址
st_addr_rd: begin //写地址以进行读数据
case(cnt)
7'd0 : begin
sda_dir <= 1'b1; //dir拉高,方向是输出写数据
sda_out <= 1'b1;
end
7'd1 : scl <= 1'b1;
7'd2 : sda_out <= 1'b0; //重新开始
7'd3 : scl <= 1'b0;
7'd4 : sda_out <= SLAVE_ADDR[6]; //传送器件地址
7'd5 : scl <= 1'b1;
7'd7 : scl <= 1'b0;
7'd8 : sda_out <= SLAVE_ADDR[5];
7'd9 : scl <= 1'b1;
7'd11: scl <= 1'b0;
7'd12: sda_out <= SLAVE_ADDR[4];
7'd13: scl <= 1'b1;
7'd15: scl <= 1'b0;
7'd16: sda_out <= SLAVE_ADDR[3];
7'd17: scl <= 1'b1;
7'd19: scl <= 1'b0;
7'd20: sda_out <= SLAVE_ADDR[2];
7'd21: scl <= 1'b1;
7'd23: scl <= 1'b0;
7'd24: sda_out <= SLAVE_ADDR[1];
7'd25: scl <= 1'b1;
7'd27: scl <= 1'b0;
7'd28: sda_out <= SLAVE_ADDR[0];
7'd29: scl <= 1'b1;
7'd31: scl <= 1'b0;
7'd32: sda_out <= 1'b1; //1:读
7'd33: scl <= 1'b1;
7'd35: scl <= 1'b0;
7'd36: begin
sda_dir <= 1'b0;
sda_out <= 1'b1;
end
7'd37: scl <= 1'b1;
7'd38: begin //从机应答
st_done <= 1'b1;
if(sda_in == 1'b1) //高电平表示未应答
i2c_ack <= 1'b1; //拉高应答标志位
end
7'd39: begin
scl <= 1'b0;
cnt <= 1'b0;
end
default : ;
endcase
end
st_data_rd: begin //读取数据(8 bit)
case(cnt)
7'd0: sda_dir <= 1'b0; //拉低,变成读操作,sda_out为高阻,sda=sda_in
7'd1: begin
data_r[7] <= sda_in;
scl <= 1'b1;
end
7'd3: scl <= 1'b0;
7'd5: begin
data_r[6] <= sda_in ;
scl <= 1'b1 ;
end
7'd7: scl <= 1'b0;
7'd9: begin
data_r[5] <= sda_in;
scl <= 1'b1 ;
end
7'd11: scl <= 1'b0;
7'd13: begin
data_r[4] <= sda_in;
scl <= 1'b1 ;
end
7'd15: scl <= 1'b0;
7'd17: begin
data_r[3] <= sda_in;
scl <= 1'b1 ;
end
7'd19: scl <= 1'b0;
7'd21: begin
data_r[2] <= sda_in;
scl <= 1'b1 ;
end
7'd23: scl <= 1'b0;
7'd25: begin
data_r[1] <= sda_in;
scl <= 1'b1 ;
end
7'd27: scl <= 1'b0;
7'd29: begin
data_r[0] <= sda_in;
scl <= 1'b1 ;
end
7'd31: scl <= 1'b0;
7'd32: begin
sda_dir <= 1'b1; //拉高就是写
sda_out <= 1'b1; //
end
7'd33: scl <= 1'b1;
7'd34: st_done <= 1'b1; //非应答
7'd35: begin
scl <= 1'b0;
cnt <= 1'b0;
i2c_data_r <= data_r; //将读的数据寄存到i2c_data_r
end
default : ;
endcase
end停止
st_stop: begin //结束I2C操作
case(cnt)
7'd0: begin
sda_dir <= 1'b1; //结束I2C
sda_out <= 1'b0;
end
7'd1 : scl <= 1'b1;
7'd3 : sda_out <= 1'b1;
7'd15: st_done <= 1'b1; //这里也是I2C结束标志,当SCL为高时,输出SDA_OUT由低变高。
7'd16: begin
cnt <= 1'b0;
i2c_done <= 1'b1; //向上层模块传递I2C结束信号
end
default : ;
endcase
end
endcase
end
end
endmodule驱动模块tb文件:太复杂了。直接调用网上的。以下是仿真VIVADO
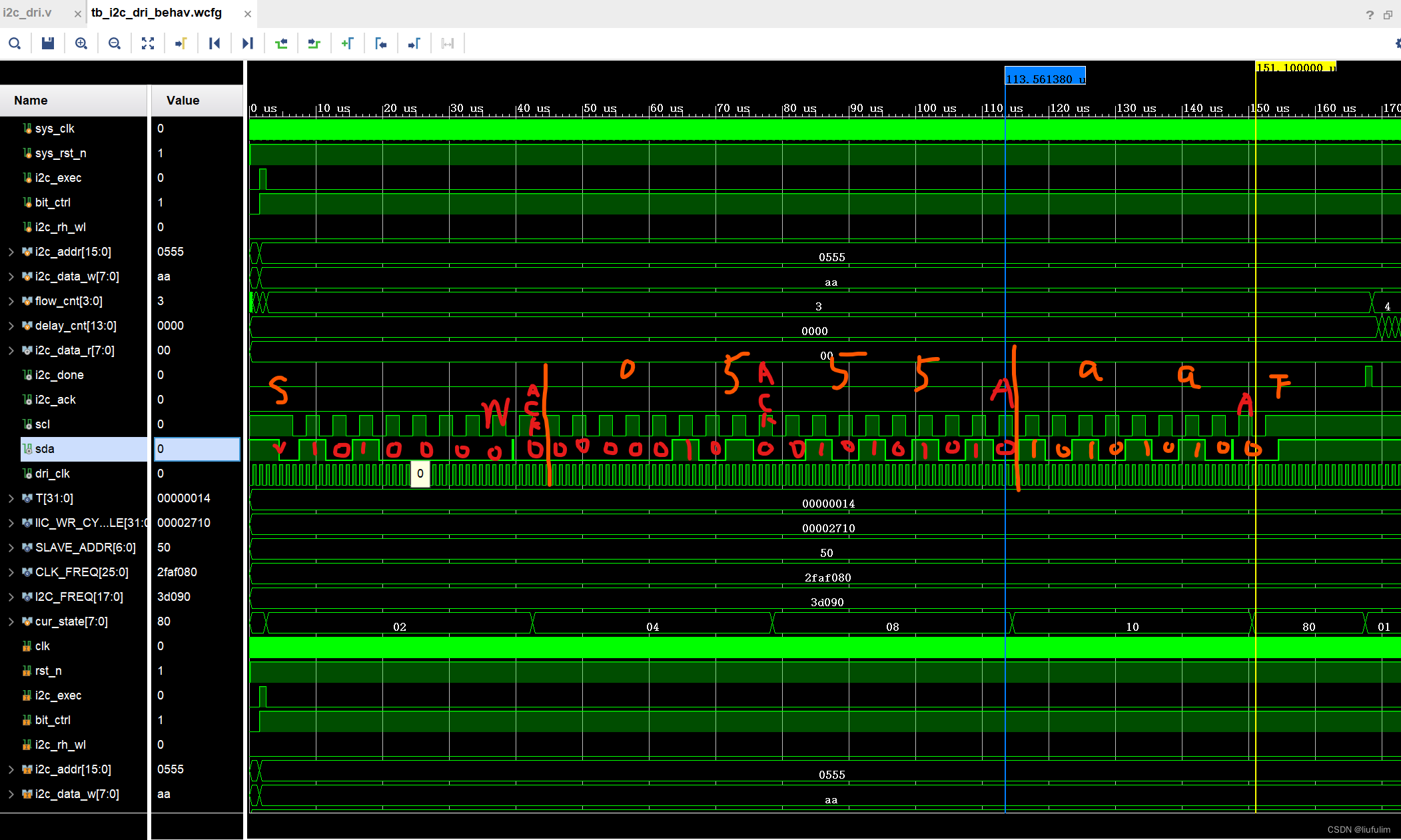
TB设定的地址是0555,写入数据是AA。这里可以注意i2c_rh_wl信号是low。开始结束标志都是在SCL高电平期间由SDA给出。ACK信号也正常。
下图是读操作,由于读写延迟了10MS,仿真时间应该设置为11MS才看的到读操作。
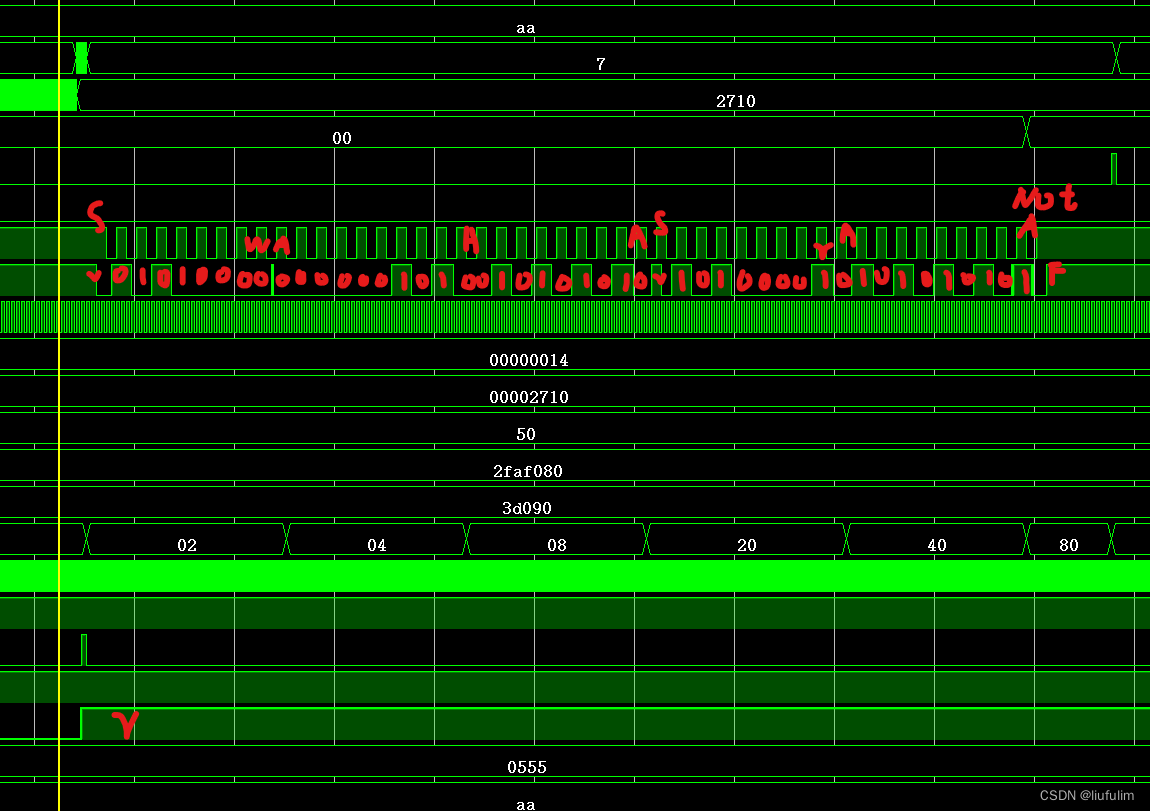 i2c_rh_wl拉高为1.先进行假写操作。然后再重新开始访问器件地址,最后一位拉高为R读操作。然后是读数据AA,但是之后接着的是NOT ACK,主机非应答。然后拉高SDA结束.
i2c_rh_wl拉高为1.先进行假写操作。然后再重新开始访问器件地址,最后一位拉高为R读操作。然后是读数据AA,但是之后接着的是NOT ACK,主机非应答。然后拉高SDA结束.
仿真是OK的,可以设定错误的divce地址,会得到NOT ACK,即ACK为高。。。即得不到从机的应答.
接下来是本次实验其他部分。
E2PROM_RW部分
由于我们要检验读出的数据和写入的是否一致。用灯来表示。在RW模块需要完成数据检查,正确输出1,否则为0;同时输出测试完成(不同于IIC驱动的一次操作完成)
这个模块还需要负责读出ICC_dri输入的数据,即EEPROM里的,和输出器件内地址(2^13位,这里用16位)以及要写的数据。TB模块设置的在0555[000001010101]处写aa[10101010]...
module e2prom_rw(
input clk , //时钟信号 是DRI_CLK
input rst_n , //复位信号
//i2c interface
output reg i2c_rh_wl , //I2C读写控制信号
output reg i2c_exec , //I2C触发执行信号
output reg [15:0] i2c_addr , //I2C器件内地址
output reg [ 7:0] i2c_data_w , //I2C要写的数据
input [ 7:0] i2c_data_r , //I2C读出的数据
input i2c_done , //I2C一次操作完成
input i2c_ack , //I2C应答标志
//user interface
output reg rw_done , //E2PROM读写测试完成
output reg rw_result //E2PROM读写测试结果 0:失败 1:成功
);
//parameter define
//EEPROM写数据需要添加间隔时间,读数据则不需要
parameter WR_WAIT_TIME = 14'd5000; //写入间隔时间5MS,手册里最大是10MS
parameter MAX_BYTE = 16'd256 ; //读写测试的字节个数 8页,一页32字节
//reg define
reg [1:0] flow_cnt ; //状态流控制
reg [13:0] wait_cnt ; //延时计数器
//*****************************************************
//** main code
//*****************************************************
//EEPROM读写测试,先写后读,并比较读出的值与写入的值是否一致
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
flow_cnt <= 2'b0;
i2c_rh_wl <= 1'b0;
i2c_exec <= 1'b0;
i2c_addr <= 16'b0;
i2c_data_w <= 8'b0;
wait_cnt <= 14'b0;
rw_done <= 1'b0;
rw_result <= 1'b0;
end
else begin
i2c_exec <= 1'b0;
rw_done <= 1'b0;
case(flow_cnt)
2'd0 : begin
wait_cnt <= wait_cnt + 1'b1; //延时计数
if(wait_cnt == WR_WAIT_TIME - 1'b1) begin //EEPROM写操作延时完成
wait_cnt <= 1'b0;
if(i2c_addr == MAX_BYTE) begin //256个字节写入完成
i2c_addr <= 1'b0;
i2c_rh_wl <= 1'b1;
flow_cnt <= 2'd2;
end
else begin
flow_cnt <= flow_cnt + 1'b1;
i2c_exec <= 1'b1;
end
end
end
2'd1 : begin
if(i2c_done == 1'b1) begin //EEPROM单次写入完成
flow_cnt <= 2'd0;
i2c_addr <= i2c_addr + 1'b1; //地址0~255分别写入
i2c_data_w <= i2c_data_w + 1'b1; //数据0~255
end
end
2'd2 : begin
flow_cnt <= flow_cnt + 1'b1;
i2c_exec <= 1'b1;
end
2'd3 : begin
if(i2c_done == 1'b1) begin //EEPROM单次读出完成
//读出的值错误或者I2C未应答,读写测试失败
if((i2c_addr[7:0] != i2c_data_r) || (i2c_ack == 1'b1)) begin
rw_done <= 1'b1;
rw_result <= 1'b0;
end
else if(i2c_addr == MAX_BYTE - 1'b1) begin //读写测试成功
rw_done <= 1'b1;
rw_result <= 1'b1;
end
else begin
flow_cnt <= 2'd2;
i2c_addr <= i2c_addr + 1'b1;
end
end
end
default : ;
endcase
end
end
endmodule完成数据检查后将结果给LED模块。我们设置当正确时,rw_result=1时,LED常亮否则闪烁。此模块的时钟同样是dri_clk=500khz.. 我们的试验任务是给地址0-255写入0-255. MAX_BYTE就是256.同时这个模块还要负责输出使能IIC_dri模块,还有控制读写。由于写数据是有延迟的(读没有),我们设置MS延迟,每写一个延迟5ms,下面解释状态流。
FOLW0:写延时,每写一个数据都延时一次。wait_cnt计数直到到WR_WAIT_TIME - 1,然后复位0,如果地址计数没到256,拉高i2c_exec状态流+1;如果地址到了256(地址是到255但是要读完,所以计到256结束)地址清零,由写变成读。状态流变成2.
FOLW1:单个写数据。当写完一个数据,状态回到FLOW0,延时计数且地址加一,由于咱们数据是写入0-255,数据同时+1跟随计数就可以。
FOLW2:状态流+1,拉高i2c_exec。
FOLW3:判断读出数据。这里要考虑EEPROM未应答,ack==1.由于读数据没有延迟,所以读完状态回到FLOW2,而不是FLOW0.我们判断也是跟随地址,i2c_done表示一次操作完成,读写都是这个,所以当i2c_done=1时,判断当前地址是否等于从E2PROM读出的数据(由i2c_dri读取并输入给当前模块)i2c_data_r。
if(i2c_done == 1'b1) begin //EEPROM单次读出完成
//读出的值错误或者I2C未应答,读写测试失败
if((i2c_addr[7:0] != i2c_data_r) || (i2c_ack == 1'b1)) begin
rw_done <= 1'b1;
rw_result <= 1'b0;
end
else
if(i2c_addr == MAX_BYTE - 1'b1) begin //全部读写测试成功
rw_done <= 1'b1;
rw_result <= 1'b1;
end
else begin
flow_cnt <= 2'd2; //对比完一个之后继续比较所以要跳到FLOW2
i2c_addr <= i2c_addr + 1'b1;
end
end 这里是直接一个一个比,读数据读一个比一个。一开始rw_result是0,然后读到错误还是0,读一个对的也是0,直到读到全部都是对才拉高。
关于之前的写操作地址为什么是到256,而这里是到255.:写数据时写完一个地址加一。写完第255个加1,然后判断;读数据则是读完先判断再加地址,所以读完255就已经同时判断好了,所以到255就输出结果。
LED部分,这部分功能就是接收来自RW模块输出的结果rw_result。当读写没完成时LED不亮,读正确常亮,错误闪烁。
module led_alarm
#(parameter L_TIME = 25'd25_000_000
)
(
input clk , //时钟信号
input rst_n , //复位信号
input rw_done , //完成标志
input rw_result , //E2PROM读写测试结果
output reg led //E2PROM读写测试结果表示,用灯来表示常亮就是正确,否则就是错误
);
//reg define
reg rw_done_flag; //读写测试完成标志
reg [24:0] led_cnt ; //led计数
//*****************************************************
//** main code
//*****************************************************
//读写测试完成标志,由于rw_done是一个脉冲信号所以要对他寄存。
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
rw_done_flag <= 1'b0;
else if(rw_done)
rw_done_flag <= 1'b1;
end
//错误标志为1时PL_LED0闪烁,否则PL_LED0常亮
always @(posedge clk or negedge rst_n) begin
if(!rst_n) begin
led_cnt <= 25'd0;
led <= 1'b0;
end
else begin
if(rw_done_flag) begin
if(rw_result) //读写测试正确
led <= 1'b1; //led灯常亮
else begin //读写测试错误
led_cnt <= led_cnt + 25'd1;
if(led_cnt == L_TIME - 1'b1) begin
led_cnt <= 25'd0;
led <= ~led; //led灯闪烁
end
end
end
else
led <= 1'b0; //读写测试完成之前,led灯熄灭
end
end
endmodule在TOP例化中,来控制L_TIME,由于LED模块用的时钟也是1KHZ,因此闪烁计数值应该以这个来设计。顶层中L_TIME=125000。125ms变一次。(顶层例化的参数才是最终的,所以这里的25000000并不是)














 1274
1274











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









