









基于像素的匹配
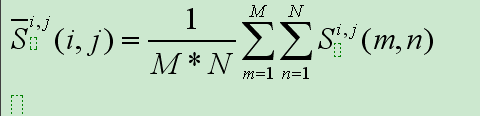
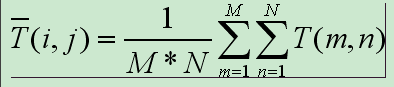
1、归一化积相关灰度匹配:
模板图像 以窗口滚动的方式 在源图像中 扫一遍。
具体运算公式如下:
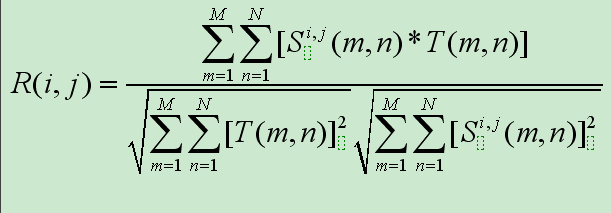
R(i,j) = dSigmaST / (dSigmaT * dSigmaS) 对应上公式; R(i,j)=[0,1]
M ,N 模板大小
对于公式的解释:
dSimgmaST -- 在 在原图(i ,j) 位置 模板图像每个像素与对应原图像素的积 的和)
dSigmaT -- 模板图像每个像素的积 的和
dSigmaS -- 在原图(i,j)位置,模板图像对应的原图的每个像素的积的和
R(i,j)最大的位置就是最匹配的位置。
/*
函数:NormalizeGrayMatch
功能:归一化灰度值匹配
参数:src 原图
template 模板
point 匹配的位置左上角
返回值: 0 --- 未找打匹配对象
其他 --- 返回匹配位置相似度
*/
double NormalizeGrayMatch(IplImage * src , IplImage * temp , CvPoint & point)
{
int nSrcWidth = src - >width ;
int nSrcHeight = src - >height;
int nTwidth = temp - >width ;
int nTheight = temp - >height ;
//计算模板像素灰度值 dSigmaT
double dSigmaT = 0 ;
unsigned char piexl = 0 ;
for ( int i = 0 ; i < nTheight ; ++ i)
{
for( int j = 0 ; j < nTwidth ; ++j)
{
piexl = *(temp - >imageData + i * temp - >widthStep + j ) ;
dSigmaT += ( double) piexl * piexl ;
}
}
double R = 0 ;
double dSigmaS ;
double dSigmaST ;
unsigned char piexlT,piexlS;
double dMaxR = - 1 ;
int nMaxHeight = - 1 ;
int nMaxWidht = - 1 ;
for ( int i = 0 ; i < nSrcHeight - nTheight + 1 ; ++ i )
{
for ( int j = 0 ; j < nSrcWidth - nTwidth + 1 ; ++ j)
{
dSigmaST = 0 ;
dSigmaS = 0 ;
// 计算dSigmaST dSigmaS
for ( int k = 0 ; k < nTheight ; ++ k)
{
for ( int l = 0 ; l < nTwidth ; ++ l)
{
//模板像素
piexlT = *( temp - >imageData + k * temp - >widthStep + l );
//源图像像素
piexlS = *(src - >imageData + (k + i ) * src - >widthStep + (l + j) ) ;
dSigmaST += ( double) piexlS * piexlT ;
dSigmaS += ( double) piexlS * piexlS ;
}
}
R = dSigmaST / ( sqrt(dSigmaS) * sqrt(dSigmaT) ) ;
if (R > dMaxR )
{
nMaxWidht = j;
nMaxHeight = i ;
dMaxR =R ;
}
}
}
if (dMaxR != - 1)
{
point .x = nMaxWidht ;
point .y = nMaxHeight;
return dMaxR ;
}
return 0 ;
}
函数:NormalizeGrayMatch
功能:归一化灰度值匹配
参数:src 原图
template 模板
point 匹配的位置左上角
返回值: 0 --- 未找打匹配对象
其他 --- 返回匹配位置相似度
*/
double NormalizeGrayMatch(IplImage * src , IplImage * temp , CvPoint & point)
{
int nSrcWidth = src - >width ;
int nSrcHeight = src - >height;
int nTwidth = temp - >width ;
int nTheight = temp - >height ;
//计算模板像素灰度值 dSigmaT
double dSigmaT = 0 ;
unsigned char piexl = 0 ;
for ( int i = 0 ; i < nTheight ; ++ i)
{
for( int j = 0 ; j < nTwidth ; ++j)
{
piexl = *(temp - >imageData + i * temp - >widthStep + j ) ;
dSigmaT += ( double) piexl * piexl ;
}
}
double R = 0 ;
double dSigmaS ;
double dSigmaST ;
unsigned char piexlT,piexlS;
double dMaxR = - 1 ;
int nMaxHeight = - 1 ;
int nMaxWidht = - 1 ;
for ( int i = 0 ; i < nSrcHeight - nTheight + 1 ; ++ i )
{
for ( int j = 0 ; j < nSrcWidth - nTwidth + 1 ; ++ j)
{
dSigmaST = 0 ;
dSigmaS = 0 ;
// 计算dSigmaST dSigmaS
for ( int k = 0 ; k < nTheight ; ++ k)
{
for ( int l = 0 ; l < nTwidth ; ++ l)
{
//模板像素
piexlT = *( temp - >imageData + k * temp - >widthStep + l );
//源图像像素
piexlS = *(src - >imageData + (k + i ) * src - >widthStep + (l + j) ) ;
dSigmaST += ( double) piexlS * piexlT ;
dSigmaS += ( double) piexlS * piexlS ;
}
}
R = dSigmaST / ( sqrt(dSigmaS) * sqrt(dSigmaT) ) ;
if (R > dMaxR )
{
nMaxWidht = j;
nMaxHeight = i ;
dMaxR =R ;
}
}
}
if (dMaxR != - 1)
{
point .x = nMaxWidht ;
point .y = nMaxHeight;
return dMaxR ;
}
return 0 ;
}
2. 序贯相似性检测法匹配 SSDA -- Similarity Sequential Dectection Algorithm
前面的归一化积相关匹配算法计算量很大,原因在于搜索窗口在源图像上进行滑动,每滑动一次就要做一次匹配运算,除了匹配的点外在其他匹配点做了‘无用功’,导
致了匹配算法的计算量上升。所以,一旦发现所在的参考位置为非匹配点,就丢弃不再计算,立刻换到新的参考点计算,可以大大加速匹配过程。
SSDA算法过程:
1.定义绝对误差:

其中:
 模板对应原图(子图)的灰度平均值
模板对应原图(子图)的灰度平均值
 模板的灰度平均值
模板的灰度平均值
2.取一个不变阈值
3.扫面原图每个像素点待匹配点对应的模板子图,根据1中的公式据算绝对误差,当累加值超过阈值时停止累加,停止此模板子图的扫描,记录带匹配点的位置和累加次数
4,循环 3 直到扫描完全图
5,累加次数最少的像素点就为最佳匹配点
对于序贯相似相算法有很多可以优化的地方, 比如 第三步 扫描子图像素的时候 可以用 隔行 列 扫描 , 第二部 阈值可以改为自动阈值等等,不过这里的优化有能
怎么样呢 还是很慢呀,还是期待后面的算法吧。
/*
函数:SSDAMatch
参数:src --- 源图像 in
temp -- 匹配模板 in
point -- 匹配位置 out
threshold -- 阈值 in
返回值:累加次数
限制: 8位灰度图
*/
int SSDAMatch(IplImage * src , IplImage * temp , CvPoint & point , int threshold)
{
int nSrcWidth = src - >width ;
int nSrcHeight = src - >height;
int nTwidth = temp - >width ;
int nTheight = temp - >height ;
int ntempsize = nTwidth * nTheight ; //模板大小
//计算模板像素灰度值 dSigmaT
double dSigmaT = 0 ;
unsigned char piexl = 0 ;
for ( int i = 0 ; i < nTheight ; ++ i)
{
for( int j = 0 ; j < nTwidth ; ++j)
{
piexl = *(temp - >imageData + i * temp - >widthStep + j ) ;
dSigmaT += ( double) piexl ;
}
}
dSigmaT /=ntempsize ;
double dSigmaS = 0 ;
double dbr = 0; //误差
long lr = 0; //误差累积次数
long maxR = 0; //最大累积次数
int nMaxHeight = 0 ; //最大累计次数 对应匹配位置 (左上角)
int nMaxWidht = 0 ;
for ( int i = 0 ; i < nSrcHeight - nTheight + 1 ; ++i)
{
for ( int j = 0 ; j < nSrcWidth - nTwidth + 1 ; ++ j)
{
//计算dSigmaS
dSigmaS = 0 ;
dbr = 0 ;
lr = 0 ;
for ( int k = 0 ; k < nTheight ; ++k)
{
for( int l = 0 ; l < nTwidth ; ++l)
{
dSigmaS +=( unsigned char ) *(src - >imageData + (k +i) * src - >widthStep + (l + j)) ;
}
}
dSigmaS /=ntempsize ;
//计算误差 一旦超过阈值则抛弃不再计算
for ( int k = 0 ; k < nTheight ; ++ k)
{
for ( int l = 0 ; l < nTwidth ; ++l)
{
dbr += abs( ( unsigned char ) *(src - >imageData + (k +i) * src - >widthStep + (l +j) ) -dSigmaS -
( unsigned char ) *(temp - >imageData + k * temp - >widthStep + l) +dSigmaT );
lr ++ ;
if (dbr > = threshold)
break;
}
if (dbr > =threshold)
break;
}
//取达到threshold 累加最多的 位置
if ( lr >maxR )
{
maxR = lr ;
nMaxHeight = i;
nMaxWidht = j ;
}
}
}
point.x = nMaxWidht ;
point.y = nMaxHeight ;
return lr;
}
函数:SSDAMatch
参数:src --- 源图像 in
temp -- 匹配模板 in
point -- 匹配位置 out
threshold -- 阈值 in
返回值:累加次数
限制: 8位灰度图
*/
int SSDAMatch(IplImage * src , IplImage * temp , CvPoint & point , int threshold)
{
int nSrcWidth = src - >width ;
int nSrcHeight = src - >height;
int nTwidth = temp - >width ;
int nTheight = temp - >height ;
int ntempsize = nTwidth * nTheight ; //模板大小
//计算模板像素灰度值 dSigmaT
double dSigmaT = 0 ;
unsigned char piexl = 0 ;
for ( int i = 0 ; i < nTheight ; ++ i)
{
for( int j = 0 ; j < nTwidth ; ++j)
{
piexl = *(temp - >imageData + i * temp - >widthStep + j ) ;
dSigmaT += ( double) piexl ;
}
}
dSigmaT /=ntempsize ;
double dSigmaS = 0 ;
double dbr = 0; //误差
long lr = 0; //误差累积次数
long maxR = 0; //最大累积次数
int nMaxHeight = 0 ; //最大累计次数 对应匹配位置 (左上角)
int nMaxWidht = 0 ;
for ( int i = 0 ; i < nSrcHeight - nTheight + 1 ; ++i)
{
for ( int j = 0 ; j < nSrcWidth - nTwidth + 1 ; ++ j)
{
//计算dSigmaS
dSigmaS = 0 ;
dbr = 0 ;
lr = 0 ;
for ( int k = 0 ; k < nTheight ; ++k)
{
for( int l = 0 ; l < nTwidth ; ++l)
{
dSigmaS +=( unsigned char ) *(src - >imageData + (k +i) * src - >widthStep + (l + j)) ;
}
}
dSigmaS /=ntempsize ;
//计算误差 一旦超过阈值则抛弃不再计算
for ( int k = 0 ; k < nTheight ; ++ k)
{
for ( int l = 0 ; l < nTwidth ; ++l)
{
dbr += abs( ( unsigned char ) *(src - >imageData + (k +i) * src - >widthStep + (l +j) ) -dSigmaS -
( unsigned char ) *(temp - >imageData + k * temp - >widthStep + l) +dSigmaT );
lr ++ ;
if (dbr > = threshold)
break;
}
if (dbr > =threshold)
break;
}
//取达到threshold 累加最多的 位置
if ( lr >maxR )
{
maxR = lr ;
nMaxHeight = i;
nMaxWidht = j ;
}
}
}
point.x = nMaxWidht ;
point.y = nMaxHeight ;
return lr;
}
基于特征的匹配
利用灰度信息匹配的方法主要缺陷是计算量过大,对图像的灰度变换很敏感,尤其是非线性的光照变化,此外,对目标的旋转、变形以及遮挡也比较敏感,为
了克服这些缺点,可以利用图像的特征进行匹配,由于图像的特征点比像素点要少很多,大大减少了匹配过程的计算量,同时,特征点的匹配度量值对位置的
变化比较敏感,可以大大的提高匹配的精度。而且,特征点的提取过程可以减少噪声的影响,对灰度变化、图像形变以及遮挡等有较好的适应能力。
3. 不变矩匹配法 TM算法 具有平移、旋转、尺寸不变性
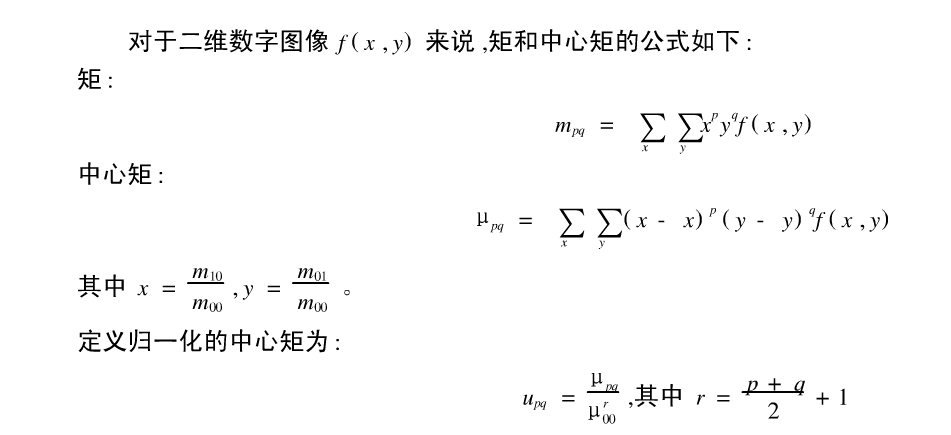
p+q>=2
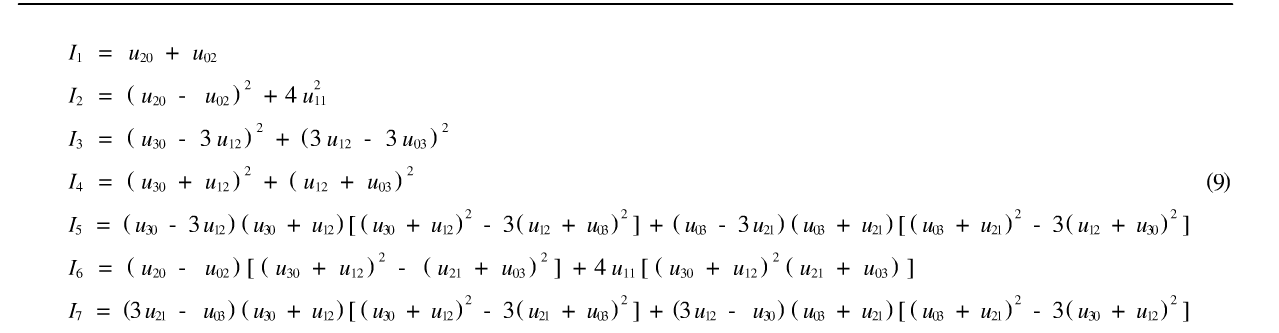
归一化公式:
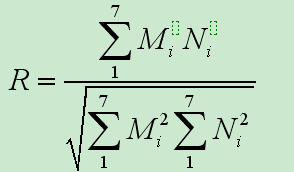
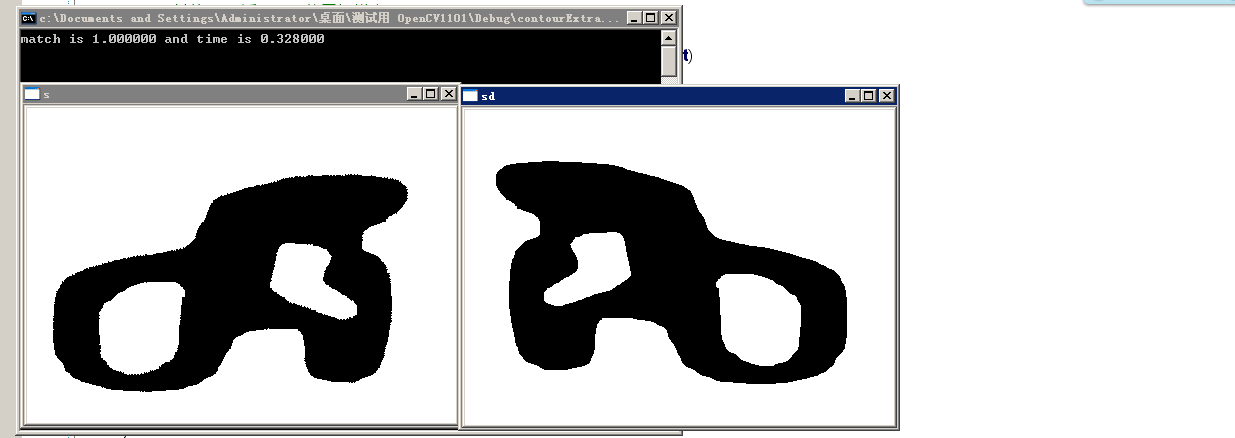
算法过程:计算 分别计算模板和原图的7个不变矩 ,根据归一化公式得出相似度。
double momentMatch(
unsigned
char
* src ,
unsigned
char
* temp ,
int nwidth ,
int nheight ,
int nwidthstep )
{
//原图和模板重心矩
int nSBarycenterX , nSBarycenterY;
int nTBasrycenterX,nTBarycenterY;
CalBarycenter(src , nwidth , nheight , nwidthstep ,nSBarycenterX , nSBarycenterY ) ;
CalBarycenter(temp , nwidth , nheight ,nwidthstep , nTBasrycenterX , nTBarycenterY);
//原图和模板二阶三阶规格化中心矩
double Su00 ,Su02 ,Su20 ,Su11 ,Su30 ,Su12 ,Su21 ,Su03;
double Tu00 ,Tu02 ,Tu20 ,Tu11 ,Tu30 ,Tu12 ,Tu21 ,Tu03;
Su00 = CalCenterMoment(src , nwidth ,nheight ,nwidthstep ,nSBarycenterX,nSBarycenterY, 0, 0) ;
Su02 = CalCenterMoment(src , nwidth ,nheight , nwidthstep , nSBarycenterX,nSBarycenterY, 0, 2) /pow(Su00 , 2);
Su20 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY, 2, 0) /pow(Su00 , 2);
Su11 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY, 1, 1) /pow(Su00, 2);
Su30 = CalCenterMoment(src , nwidth , nheight ,nwidthstep , nSBarycenterX,nSBarycenterY , 3 , 0 ) /pow(Su00 , 2. 5);
Su12 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY , 1 , 2 ) /pow(Su00 , 2. 5);
Su21 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY , 2 , 1 ) /pow(Su00 , 2. 5);
Su03 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY , 0, 3) /pow(Su00 , 2. 5);
Tu00 = CalCenterMoment(temp , nwidth ,nheight ,nwidthstep ,nTBasrycenterX , nTBarycenterY, 0, 0) ;
Tu02 = CalCenterMoment(temp , nwidth ,nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 0, 2) /pow(Su00 , 2);
Tu20 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 2, 0) /pow(Su00 , 2);
Tu11 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 1, 1) /pow(Su00, 2);
Tu30 = CalCenterMoment(temp , nwidth , nheight ,nwidthstep , nTBasrycenterX , nTBarycenterY , 3 , 0 ) /pow(Su00 , 2. 5);
Tu12 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY , 1 , 2 ) /pow(Su00 , 2. 5);
Tu21 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY , 2 , 1 ) /pow(Su00 , 2. 5);
Tu03 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 0, 3) /pow(Su00 , 2. 5);
//原图和模板不变矩
double Sa[ 7] , Ta[ 7];
Sa[ 0] = Su02 + Su20 ;
Sa[ 1] = pow(Su20 - Su02 , 2) + 4 * pow(Su11 , 2 );
Sa[ 2] = pow(Su30 - 3 *Su12 , 2) + pow( 3 * Su12 -Su03 , 2);
Sa[ 3] = pow(Su30 +Su12 , 2) + pow(Su21 + Su03 , 2);
Sa[ 4] = (Su30 - 3 *Su12) * (Su30 + Su12 ) * (pow(Su30 + Su12 , 2) - 3 *pow(Su21 + Su03 , 2)) +
( 3 * Su21 -Su03) *(Su21 + Su03) *( 3 * pow(Su03 + Su12 , 2) - pow(Su21 + Su03 , 2));
Sa[ 5] = (Su20 - Su02) *(pow(Su30 +Su12 , 2) - pow(Su21 + Su03 , 2)) + 4 *Su11 *(Su30 + Su12) *(Su21 +Su03);
Sa[ 6] = ( 3 *Su21 - Su03) *(Su30 + Su12) *(pow(Su30 + Su12 , 2) - 3 *pow(Su21 + Su03 , 2)) + (Su30 - 3 *Su12) *(Su21 +Su03) *
( 3 *pow(Su30 + Su12 , 2) - pow(Su21 + Su03 , 2));
Ta[ 0] = Tu02 + Tu20 ;
Ta[ 1] = pow(Tu20 - Tu02 , 2) + 4 * pow(Tu11 , 2 );
Ta[ 2] = pow(Tu30 - 3 *Tu12 , 2) + pow( 3 * Tu12 -Tu03 , 2);
Ta[ 3] = pow(Tu30 +Tu12 , 2) + pow(Tu21 + Tu03 , 2);
Ta[ 4] = (Tu30 - 3 *Tu12) * (Tu30 + Tu12 ) * (pow(Tu30 + Su12 , 2) - 3 *pow(Tu21 + Tu03 , 2)) +
( 3 * Tu21 -Tu03) *(Tu21 + Tu03) *( 3 * pow(Tu03 + Tu12 , 2) - pow(Tu21 + Tu03 , 2));
Ta[ 5] = (Tu20 - Tu02) *(pow(Tu30 +Tu12 , 2) - pow(Tu21 + Tu03 , 2)) + 4 *Tu11 *(Tu30 + Tu12) *(Tu21 +Tu03);
Ta[ 6] = ( 3 *Tu21 - Tu03) *(Tu30 + Tu12) *(pow(Tu30 + Tu12 , 2) - 3 *pow(Tu21 + Tu03 , 2)) + (Tu30 - 3 *Tu12) *(Tu21 +Tu03) *
( 3 *pow(Tu30 + Tu12 , 2) - pow(Tu21 + Tu03 , 2));
double r = 0;
double dSigmaST = 0;
double dSigmaS = 0;
double dSigmaT = 0 ;
for ( int i = 0 ; i < 7 ; ++i)
{
dSigmaST += Ta[i] * Sa[i] ;
dSigmaS +=pow(Sa[i] , 2);
dSigmaT +=pow(Ta[i] , 2);
}
return r = dSigmaST / sqrt( dSigmaS * dSigmaT) ;
}
/*
函数:CalBarycenter
功能:计算重心矩
参数:pdata -- 图像数据 in
nwidth -- 宽 in
nheight -- 高 in
nwidthstep -- 步长 in
nBarycenterX -- 重心坐标 out
nBarycenterY
*/
void CalBarycenter( unsigned char * pdata , int nwidth , int nheight , int nwidthstep , int &nBarycenterX , int &nBarycenterY)
{
double m00 , m01 ,m10;
m00 = 0 ;
m01 = 0 ;
m10 = 0 ;
for ( int i = 0 ; i < nheight ; ++i)
{
for ( int j = 0 ; j < nwidth ; ++ j)
{
m00 += *(pdata + i * nwidthstep + j) ;
m01 += *(pdata + i * nwidthstep + j) * j ;
m10 += *(pdata + i * nwidthstep + j) * i ;
}
}
nBarycenterX =( int) (m10 / m00 + 0. 5);
nBarycenterY = ( int)(m01 / m00 + 0. 5);
}
/*
函数:CalCenterMoment
功能:计算中心矩
参数:pdata --- 图像数据 in
nwidth -- 宽 in
nheight -- 高 in
nwidthstep -- 步长 in
nBarycenterX -- 重心矩 in
nBarycenterY
ip -- 阶数 in
jq
返回值:中心距值
*/
double CalCenterMoment( unsigned char * pdata , int nwidth , int nheight , int nwidthstep ,
double nBarycenterX , double nBarycenterY, int ip, int jq)
{
double Upq = 0 ;
for ( int i = 0 ; i < nheight ; ++i)
{
for ( int j = 0; j <nwidth ; ++ j)
{
Upq += *(pdata + i * nwidthstep + j) + pow(j -nBarycenterX , ip) * pow(i - nBarycenterY , jq) ;
}
}
return Upq ;
}
{
//原图和模板重心矩
int nSBarycenterX , nSBarycenterY;
int nTBasrycenterX,nTBarycenterY;
CalBarycenter(src , nwidth , nheight , nwidthstep ,nSBarycenterX , nSBarycenterY ) ;
CalBarycenter(temp , nwidth , nheight ,nwidthstep , nTBasrycenterX , nTBarycenterY);
//原图和模板二阶三阶规格化中心矩
double Su00 ,Su02 ,Su20 ,Su11 ,Su30 ,Su12 ,Su21 ,Su03;
double Tu00 ,Tu02 ,Tu20 ,Tu11 ,Tu30 ,Tu12 ,Tu21 ,Tu03;
Su00 = CalCenterMoment(src , nwidth ,nheight ,nwidthstep ,nSBarycenterX,nSBarycenterY, 0, 0) ;
Su02 = CalCenterMoment(src , nwidth ,nheight , nwidthstep , nSBarycenterX,nSBarycenterY, 0, 2) /pow(Su00 , 2);
Su20 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY, 2, 0) /pow(Su00 , 2);
Su11 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY, 1, 1) /pow(Su00, 2);
Su30 = CalCenterMoment(src , nwidth , nheight ,nwidthstep , nSBarycenterX,nSBarycenterY , 3 , 0 ) /pow(Su00 , 2. 5);
Su12 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY , 1 , 2 ) /pow(Su00 , 2. 5);
Su21 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY , 2 , 1 ) /pow(Su00 , 2. 5);
Su03 = CalCenterMoment(src , nwidth , nheight , nwidthstep , nSBarycenterX,nSBarycenterY , 0, 3) /pow(Su00 , 2. 5);
Tu00 = CalCenterMoment(temp , nwidth ,nheight ,nwidthstep ,nTBasrycenterX , nTBarycenterY, 0, 0) ;
Tu02 = CalCenterMoment(temp , nwidth ,nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 0, 2) /pow(Su00 , 2);
Tu20 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 2, 0) /pow(Su00 , 2);
Tu11 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 1, 1) /pow(Su00, 2);
Tu30 = CalCenterMoment(temp , nwidth , nheight ,nwidthstep , nTBasrycenterX , nTBarycenterY , 3 , 0 ) /pow(Su00 , 2. 5);
Tu12 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY , 1 , 2 ) /pow(Su00 , 2. 5);
Tu21 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY , 2 , 1 ) /pow(Su00 , 2. 5);
Tu03 = CalCenterMoment(temp , nwidth , nheight , nwidthstep , nTBasrycenterX , nTBarycenterY, 0, 3) /pow(Su00 , 2. 5);
//原图和模板不变矩
double Sa[ 7] , Ta[ 7];
Sa[ 0] = Su02 + Su20 ;
Sa[ 1] = pow(Su20 - Su02 , 2) + 4 * pow(Su11 , 2 );
Sa[ 2] = pow(Su30 - 3 *Su12 , 2) + pow( 3 * Su12 -Su03 , 2);
Sa[ 3] = pow(Su30 +Su12 , 2) + pow(Su21 + Su03 , 2);
Sa[ 4] = (Su30 - 3 *Su12) * (Su30 + Su12 ) * (pow(Su30 + Su12 , 2) - 3 *pow(Su21 + Su03 , 2)) +
( 3 * Su21 -Su03) *(Su21 + Su03) *( 3 * pow(Su03 + Su12 , 2) - pow(Su21 + Su03 , 2));
Sa[ 5] = (Su20 - Su02) *(pow(Su30 +Su12 , 2) - pow(Su21 + Su03 , 2)) + 4 *Su11 *(Su30 + Su12) *(Su21 +Su03);
Sa[ 6] = ( 3 *Su21 - Su03) *(Su30 + Su12) *(pow(Su30 + Su12 , 2) - 3 *pow(Su21 + Su03 , 2)) + (Su30 - 3 *Su12) *(Su21 +Su03) *
( 3 *pow(Su30 + Su12 , 2) - pow(Su21 + Su03 , 2));
Ta[ 0] = Tu02 + Tu20 ;
Ta[ 1] = pow(Tu20 - Tu02 , 2) + 4 * pow(Tu11 , 2 );
Ta[ 2] = pow(Tu30 - 3 *Tu12 , 2) + pow( 3 * Tu12 -Tu03 , 2);
Ta[ 3] = pow(Tu30 +Tu12 , 2) + pow(Tu21 + Tu03 , 2);
Ta[ 4] = (Tu30 - 3 *Tu12) * (Tu30 + Tu12 ) * (pow(Tu30 + Su12 , 2) - 3 *pow(Tu21 + Tu03 , 2)) +
( 3 * Tu21 -Tu03) *(Tu21 + Tu03) *( 3 * pow(Tu03 + Tu12 , 2) - pow(Tu21 + Tu03 , 2));
Ta[ 5] = (Tu20 - Tu02) *(pow(Tu30 +Tu12 , 2) - pow(Tu21 + Tu03 , 2)) + 4 *Tu11 *(Tu30 + Tu12) *(Tu21 +Tu03);
Ta[ 6] = ( 3 *Tu21 - Tu03) *(Tu30 + Tu12) *(pow(Tu30 + Tu12 , 2) - 3 *pow(Tu21 + Tu03 , 2)) + (Tu30 - 3 *Tu12) *(Tu21 +Tu03) *
( 3 *pow(Tu30 + Tu12 , 2) - pow(Tu21 + Tu03 , 2));
double r = 0;
double dSigmaST = 0;
double dSigmaS = 0;
double dSigmaT = 0 ;
for ( int i = 0 ; i < 7 ; ++i)
{
dSigmaST += Ta[i] * Sa[i] ;
dSigmaS +=pow(Sa[i] , 2);
dSigmaT +=pow(Ta[i] , 2);
}
return r = dSigmaST / sqrt( dSigmaS * dSigmaT) ;
}
/*
函数:CalBarycenter
功能:计算重心矩
参数:pdata -- 图像数据 in
nwidth -- 宽 in
nheight -- 高 in
nwidthstep -- 步长 in
nBarycenterX -- 重心坐标 out
nBarycenterY
*/
void CalBarycenter( unsigned char * pdata , int nwidth , int nheight , int nwidthstep , int &nBarycenterX , int &nBarycenterY)
{
double m00 , m01 ,m10;
m00 = 0 ;
m01 = 0 ;
m10 = 0 ;
for ( int i = 0 ; i < nheight ; ++i)
{
for ( int j = 0 ; j < nwidth ; ++ j)
{
m00 += *(pdata + i * nwidthstep + j) ;
m01 += *(pdata + i * nwidthstep + j) * j ;
m10 += *(pdata + i * nwidthstep + j) * i ;
}
}
nBarycenterX =( int) (m10 / m00 + 0. 5);
nBarycenterY = ( int)(m01 / m00 + 0. 5);
}
/*
函数:CalCenterMoment
功能:计算中心矩
参数:pdata --- 图像数据 in
nwidth -- 宽 in
nheight -- 高 in
nwidthstep -- 步长 in
nBarycenterX -- 重心矩 in
nBarycenterY
ip -- 阶数 in
jq
返回值:中心距值
*/
double CalCenterMoment( unsigned char * pdata , int nwidth , int nheight , int nwidthstep ,
double nBarycenterX , double nBarycenterY, int ip, int jq)
{
double Upq = 0 ;
for ( int i = 0 ; i < nheight ; ++i)
{
for ( int j = 0; j <nwidth ; ++ j)
{
Upq += *(pdata + i * nwidthstep + j) + pow(j -nBarycenterX , ip) * pow(i - nBarycenterY , jq) ;
}
}
return Upq ;
}
4.距离变换匹配法
距离变换是一种常见的二值图像处理算法,用来计算图像中任意位置到最近边缘点的距离
欧几米德空间距离:
其中a=(x1 , y1) b =(x2 ,y2)
设R 为二维图像空间集合 S 为R中的边缘点集合 R中任意一点 r,的距离变换为

如果该点是边缘点则 距离就为0 ,如果不是边缘点则找与之最近的边缘点距离,就需要做最近邻域搜索这样计算量很大。
所以有一种近似方法作为替代 即查看点8邻域内的情况如下表所示:
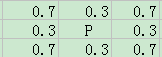
8邻域内 P 到各个点的距离 , 如果8邻域内找不到 边缘点 则距离为1;
g(x) = 0 if=0
0.3 x=1
0.7 x=sqrt(2)
1 x>sqrt(2)
对于两幅二值图像A(模板图),B(模板子图) 的匹配误差度量为:
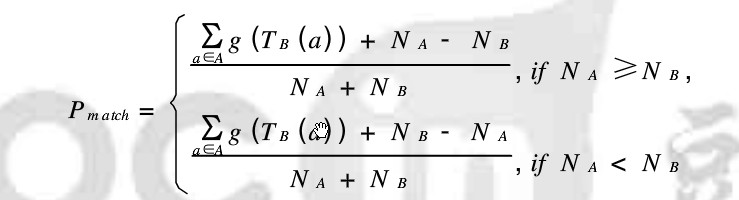
A,B 为图像中的边缘点集合。 a,b分别为A,B中的任意一点 Na Nb为A,B的点个数。
Pmatch = [0,1] ;这个公式表示:在模板对应图中如果遍历所有边缘点,累加 边缘点位置对应的模板图的该点的距离变换。
可知如果两个图像完全一样 则 Pmatch =0 ;
算法过程: 求模板图的距离变换 , 模板图边缘点个数
在待匹配图中 滑动窗口(大小为模板图大小) ,在模板对应图中如果遍历所有边缘点,累加 边缘点位置对应的模板图的该点的距离变换
dSigmaST , Pmatch = (dSigmaST + | Na - Nb | ) /(Na + Nb) ;
Pmatch最小时为最佳匹配点.
/*
函数:DisMatch
功能:距离变换匹配
参数:src -- 原图 in
temp -- 模板图 in
point -- 最佳匹配点 out
返回值:匹配误差
*/
double DisMatch(IplImage * src,IplImage *temp,CvPoint &point )
{
int nSwidth = src - >width ;
int nSheight =src - >height;
int nSwidthstep = src - >widthStep;
int nTwidth = temp - >width;
int nTheight = temp - >height;
int nTwidthstep = temp - >widthStep;
unsigned char piexl;
//将模板图像长宽加2 方便8邻域计算
unsigned char * pTdata = ( unsigned char *)malloc( (nTwidthstep + 2 ) *(nTheight + 2) );
memset(pTdata , 0, (nTwidthstep + 2 ) *(nTheight + 2) * sizeof( unsigned char));
for ( int n = 1 ; n < nTheight + 1; ++n)
memcpy( pTdata +n *(nTwidthstep + 2) + 1 , temp - >imageData + n * nTwidthstep , nTwidthstep * sizeof( unsigned char) );
//计算模板距离变换
double * pTDist = ( double *)malloc(nTwidth * nTheight * sizeof( double));
//模板T边缘点个数
int Nb = 0;
//8邻域
unsigned char u11,u12,u13,u21,u23,u31,u32,u33;
for( int i = 1 ; i < nTheight + 1 ; ++i)
{
for ( int j = 1 ; j <nTwidth + 1 ; ++j)
{
piexl = *( pTdata + i * (nTwidthstep + 2) +j);
//如果该点是边缘点 dist=0;
if (piexl == 255)
{
pTDist[(i - 1) *nTwidth + (j - 1)] = 0;
Nb ++;
}
else
{
//否则看8邻域 膨化加权
u11 = *(pTdata + (i - 1) *(nTwidthstep + 2) +j - 1);
u12 = *(pTdata +(i - 1) *(nTwidthstep + 2) +j);
u13 = *(pTdata +(i - 1) *(nTwidthstep + 2) +j + 1);
u21 = *(pTdata +i *(nTwidthstep + 2) +j - 1);
u23 = *(pTdata +i *(nTwidthstep + 2) +j + 1);
u31 = *(pTdata + (i + 1) *(nTwidthstep + 2) +j - 1);
u32 = *(pTdata +(i + 1) *(nTwidthstep + 2) +j);
u33 = *(pTdata +(i + 1) *(nTwidthstep + 2) +j + 1);
if (u12 == 255 ||u21 == 255 ||u23 == 255 ||u32 == 255)
pTDist[(i - 1) *nTwidth + (j - 1)] = 0. 3;
else if(u11 == 255 || u13 == 255 ||u31 == 255 ||u33 == 255)
pTDist[(i - 1) *nTwidth + (j - 1)] = 0. 7;
else
pTDist[(i - 1) *nTwidth + (j - 1)] = 1;
}
} //for j
} //for i
//匹配
double dbMatch = 0 ; //匹配误差
//最小匹配误差
double dbMinMatch = 1;
double dSigmaST = 0 ;
//边缘点个数
int Na = 0;
//最佳匹配点
int nMatchWidth , nMatchHeight;
for( int i = 0 ; i <nSheight -nTheight + 1; ++i)
{
for ( int j = 0; j <nSwidth -nTwidth + 1; ++j)
{
dSigmaST = 0;
dbMatch = 0;
Na = 0;
//模板滑动到(i,j)点对应的原图
for ( int k = 0;k <nTheight ; ++k)
{
for ( int l = 0 ; l <nTwidth ; ++l)
{
piexl = *(src - >imageData + (i +k) *nSwidthstep +(j +l));
if (piexl == 255)
{
dSigmaST +=pTDist[k *nTwidth +l];
Na ++;
}
} //for l
} //for l
//计算匹配误差
dbMatch = ( dSigmaST + abs(Na -Nb)) /(Na +Nb);
if (dbMatch < dbMinMatch)
{
dbMinMatch = dbMatch;
nMatchHeight = i ;
nMatchWidth = j;
}
} // for j
} //for i
point.x = nMatchWidth;
point.y = nMatchHeight;
free(pTDist);
free(pTdata);
return dbMinMatch;
}
函数:DisMatch
功能:距离变换匹配
参数:src -- 原图 in
temp -- 模板图 in
point -- 最佳匹配点 out
返回值:匹配误差
*/
double DisMatch(IplImage * src,IplImage *temp,CvPoint &point )
{
int nSwidth = src - >width ;
int nSheight =src - >height;
int nSwidthstep = src - >widthStep;
int nTwidth = temp - >width;
int nTheight = temp - >height;
int nTwidthstep = temp - >widthStep;
unsigned char piexl;
//将模板图像长宽加2 方便8邻域计算
unsigned char * pTdata = ( unsigned char *)malloc( (nTwidthstep + 2 ) *(nTheight + 2) );
memset(pTdata , 0, (nTwidthstep + 2 ) *(nTheight + 2) * sizeof( unsigned char));
for ( int n = 1 ; n < nTheight + 1; ++n)
memcpy( pTdata +n *(nTwidthstep + 2) + 1 , temp - >imageData + n * nTwidthstep , nTwidthstep * sizeof( unsigned char) );
//计算模板距离变换
double * pTDist = ( double *)malloc(nTwidth * nTheight * sizeof( double));
//模板T边缘点个数
int Nb = 0;
//8邻域
unsigned char u11,u12,u13,u21,u23,u31,u32,u33;
for( int i = 1 ; i < nTheight + 1 ; ++i)
{
for ( int j = 1 ; j <nTwidth + 1 ; ++j)
{
piexl = *( pTdata + i * (nTwidthstep + 2) +j);
//如果该点是边缘点 dist=0;
if (piexl == 255)
{
pTDist[(i - 1) *nTwidth + (j - 1)] = 0;
Nb ++;
}
else
{
//否则看8邻域 膨化加权
u11 = *(pTdata + (i - 1) *(nTwidthstep + 2) +j - 1);
u12 = *(pTdata +(i - 1) *(nTwidthstep + 2) +j);
u13 = *(pTdata +(i - 1) *(nTwidthstep + 2) +j + 1);
u21 = *(pTdata +i *(nTwidthstep + 2) +j - 1);
u23 = *(pTdata +i *(nTwidthstep + 2) +j + 1);
u31 = *(pTdata + (i + 1) *(nTwidthstep + 2) +j - 1);
u32 = *(pTdata +(i + 1) *(nTwidthstep + 2) +j);
u33 = *(pTdata +(i + 1) *(nTwidthstep + 2) +j + 1);
if (u12 == 255 ||u21 == 255 ||u23 == 255 ||u32 == 255)
pTDist[(i - 1) *nTwidth + (j - 1)] = 0. 3;
else if(u11 == 255 || u13 == 255 ||u31 == 255 ||u33 == 255)
pTDist[(i - 1) *nTwidth + (j - 1)] = 0. 7;
else
pTDist[(i - 1) *nTwidth + (j - 1)] = 1;
}
} //for j
} //for i
//匹配
double dbMatch = 0 ; //匹配误差
//最小匹配误差
double dbMinMatch = 1;
double dSigmaST = 0 ;
//边缘点个数
int Na = 0;
//最佳匹配点
int nMatchWidth , nMatchHeight;
for( int i = 0 ; i <nSheight -nTheight + 1; ++i)
{
for ( int j = 0; j <nSwidth -nTwidth + 1; ++j)
{
dSigmaST = 0;
dbMatch = 0;
Na = 0;
//模板滑动到(i,j)点对应的原图
for ( int k = 0;k <nTheight ; ++k)
{
for ( int l = 0 ; l <nTwidth ; ++l)
{
piexl = *(src - >imageData + (i +k) *nSwidthstep +(j +l));
if (piexl == 255)
{
dSigmaST +=pTDist[k *nTwidth +l];
Na ++;
}
} //for l
} //for l
//计算匹配误差
dbMatch = ( dSigmaST + abs(Na -Nb)) /(Na +Nb);
if (dbMatch < dbMinMatch)
{
dbMinMatch = dbMatch;
nMatchHeight = i ;
nMatchWidth = j;
}
} // for j
} //for i
point.x = nMatchWidth;
point.y = nMatchHeight;
free(pTDist);
free(pTdata);
return dbMinMatch;
}
5.最小均方误差匹配法
最小均方误差匹配方法是利用图像中的对应
特征点,通过解特征点的变换防长来计算图像间的变换参数。
基本原理:
最小均方误差匹配方法是以模板中的特征点构造矩阵X ,图像子图中的特征点构造矩阵Y ,求解矩阵X 到矩阵Y 的变换矩阵, 其中误差
最小的位置为最佳匹配位置
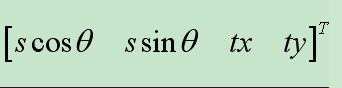
图像间的仿变换方程:

原点为中心旋转 平移
仿变换参数为
构建图像矩阵 X
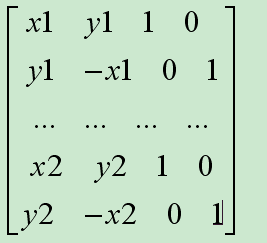
Y

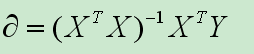
最小均方误差的原理是求解

其中















 368
368

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









