







来源:http://lib.csdn.net/article/opencv/28353
原作者:robberjohn 博客已删除了,源码下载链接在
http://download.csdn.net/download/robberjohn/8474913
http://blog.csdn.net/robberjohn/article/details/44081571
对于二值化图像,去除孔洞时采用的方法实际上与去除小区域相同,因此完全可以用同一个函数进行。
这两个功能可以采取区域生长法来实现。须注意,去除小区域时为保存有用信息,可采用8邻域探测,去除孔洞时则4邻域即可,否则容易泄露,出现靠边缘的孔洞未去除的情况。
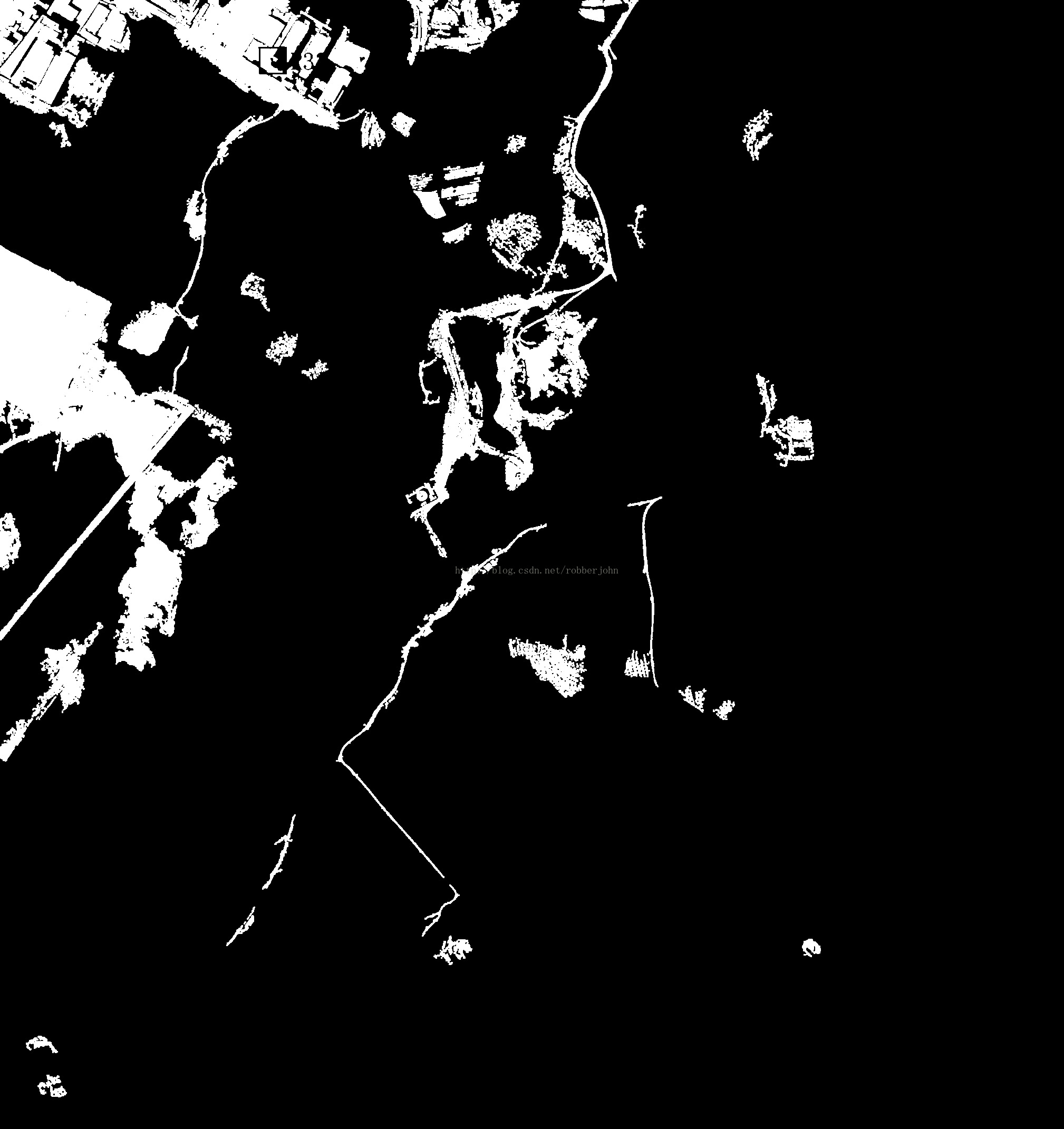
效果(区域面积阈值为700):
原图像:

小面积区域去除:
孔洞填充结果:

源码
#include <cv.h>
#include <highgui.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
void RemoveSmallRegion(Mat& Src, Mat& Dst, int AreaLimit=50, int CheckMode=1, int NeihborMode=0);
int main()
{
double t = (double)getTickCount();
char* imagePath = "E:\\SVM\\局部.jpg";
char* OutPath = "E:\\SVM\\局部_去除孔洞.jpg";
Mat Src = imread(imagePath, CV_LOAD_IMAGE_GRAYSCALE);
Mat Dst = Mat::zeros(Src.size(), CV_8UC1);
//二值化处理
for(int i = 0; i < Src.rows; ++i)
{
uchar* iData = Src.ptr<uchar>(i);
for(int j = 0; j < Src.cols; ++j)
{
if(iData[j] == 0 || iData[j]==255) continue;
else if (iData[j] < 10)
{
iData[j] = 0;
//cout<<'#';
}
else if (iData[j] > 10)
{
iData[j] = 255;
//cout<<'!';
}
}
}
cout<<"Image Binary processed."<<endl;
RemoveSmallRegion(Src, Dst, 20, 1, 1);
RemoveSmallRegion(Dst, Dst, 20, 0, 0);
cout<<"Done!"<<endl;
imwrite(OutPath, Dst);
t = ((double)getTickCount() - t)/getTickFrequency();
cout<<"Time cost: "<<t<<" sec."<<endl;
return 0;
}
//CheckMode: 0代表去除黑区域,1代表去除白区域; NeihborMode:0代表4邻域,1代表8邻域;
void RemoveSmallRegion(Mat& Src, Mat& Dst, int AreaLimit, int CheckMode, int NeihborMode)
{
int RemoveCount=0; //记录除去的个数
//记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查
Mat Pointlabel = Mat::zeros( Src.size(), CV_8UC1 );
if(CheckMode==1)
{
cout<<"Mode: 去除小区域. ";
for(int i = 0; i < Src.rows; ++i)
{
uchar* iData = Src.ptr<uchar>(i);
uchar* iLabel = Pointlabel.ptr<uchar>(i);
for(int j = 0; j < Src.cols; ++j)
{
if (iData[j] < 10)
{
iLabel[j] = 3;
}
}
}
}
else
{
cout<<"Mode: 去除孔洞. ";
for(int i = 0; i < Src.rows; ++i)
{
uchar* iData = Src.ptr<uchar>(i);
uchar* iLabel = Pointlabel.ptr<uchar>(i);
for(int j = 0; j < Src.cols; ++j)
{
if (iData[j] > 10)
{
iLabel[j] = 3;
}
}
}
}
vector<Point2i> NeihborPos; //记录邻域点位置
NeihborPos.push_back(Point2i(-1, 0));
NeihborPos.push_back(Point2i(1, 0));
NeihborPos.push_back(Point2i(0, -1));
NeihborPos.push_back(Point2i(0, 1));
if (NeihborMode==1)
{
cout<<"Neighbor mode: 8邻域."<<endl;
NeihborPos.push_back(Point2i(-1, -1));
NeihborPos.push_back(Point2i(-1, 1));
NeihborPos.push_back(Point2i(1, -1));
NeihborPos.push_back(Point2i(1, 1));
}
else cout<<"Neighbor mode: 4邻域."<<endl;
int NeihborCount=4+4*NeihborMode;
int CurrX=0, CurrY=0;
//开始检测
for(int i = 0; i < Src.rows; ++i)
{
uchar* iLabel = Pointlabel.ptr<uchar>(i);
for(int j = 0; j < Src.cols; ++j)
{
if (iLabel[j] == 0)
{
//********开始该点处的检查**********
vector<Point2i> GrowBuffer; //堆栈,用于存储生长点
GrowBuffer.push_back( Point2i(j, i) );
Pointlabel.at<uchar>(i, j)=1;
int CheckResult=0; //用于判断结果(是否超出大小),0为未超出,1为超出
for ( int z=0; z<GrowBuffer.size(); z++ )
{
for (int q=0; q<NeihborCount; q++) //检查四个邻域点
{
CurrX=GrowBuffer.at(z).x+NeihborPos.at(q).x;
CurrY=GrowBuffer.at(z).y+NeihborPos.at(q).y;
if (CurrX>=0&&CurrX<Src.cols&&CurrY>=0&&CurrY<Src.rows) //防止越界
{
if ( Pointlabel.at<uchar>(CurrY, CurrX)==0 )
{
GrowBuffer.push_back( Point2i(CurrX, CurrY) ); //邻域点加入buffer
Pointlabel.at<uchar>(CurrY, CurrX)=1; //更新邻域点的检查标签,避免重复检查
}
}
}
}
if (GrowBuffer.size()>AreaLimit) CheckResult=2; //判断结果(是否超出限定的大小),1为未超出,2为超出
else {CheckResult=1; RemoveCount++;}
for (int z=0; z<GrowBuffer.size(); z++) //更新Label记录
{
CurrX=GrowBuffer.at(z).x;
CurrY=GrowBuffer.at(z).y;
Pointlabel.at<uchar>(CurrY, CurrX) += CheckResult;
}
//********结束该点处的检查**********
}
}
}
CheckMode=255*(1-CheckMode);
//开始反转面积过小的区域
for(int i = 0; i < Src.rows; ++i)
{
uchar* iData = Src.ptr<uchar>(i);
uchar* iDstData = Dst.ptr<uchar>(i);
uchar* iLabel = Pointlabel.ptr<uchar>(i);
for(int j = 0; j < Src.cols; ++j)
{
if (iLabel[j] == 2)
{
iDstData[j] = CheckMode;
}
else if(iLabel[j] == 3)
{
iDstData[j] = iData[j];
}
}
}
cout<<RemoveCount<<" objects removed."<<endl;
} 一、对于二值图,0代表黑色,255代表白色。去除小连通区域与孔洞,小连通区域用8邻域,孔洞用4邻域。
函数名字为:void RemoveSmallRegion(Mat &Src, Mat &Dst,int AreaLimit, int CheckMode, int NeihborMode)
CheckMode: 0代表去除黑区域,1代表去除白区域; NeihborMode:0代表4邻域,1代表8邻域;
如果去除小连通区域CheckMode=1,NeihborMode=1去除孔洞CheckMode=0,NeihborMode=0
记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查 。
1.先对整个图像扫描,如果是去除小连通区域,则将黑色的背景图作为合格,像素值标记为3,如果是去除孔洞,则将白色的色素点作为合格,像素值标记为3。
2.扫面整个图像,对图像进行处理。
void RemoveSmallRegion(Mat &Src, Mat &Dst,int AreaLimit, int CheckMode, int NeihborMode)
{
int RemoveCount = 0;
//新建一幅标签图像初始化为0像素点,为了记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查
//初始化的图像全部为0,未检查
Mat PointLabel = Mat::zeros(Src.size(), CV_8UC1);
if (CheckMode == 1)//去除小连通区域的白色点
{
cout << "去除小连通域.";
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (Src.at<uchar>(i, j) < 10)
{
PointLabel.at<uchar>(i, j) = 3;//将背景黑色点标记为合格,像素为3
}
}
}
}
else//去除孔洞,黑色点像素
{
cout << "去除孔洞";
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (Src.at<uchar>(i, j) > 10)
{
PointLabel.at<uchar>(i, j) = 3;//如果原图是白色区域,标记为合格,像素为3
}
}
}
}
vector<Point2i>NeihborPos;//将邻域压进容器
NeihborPos.push_back(Point2i(-1, 0));
NeihborPos.push_back(Point2i(1, 0));
NeihborPos.push_back(Point2i(0, -1));
NeihborPos.push_back(Point2i(0, 1));
if (NeihborMode == 1)
{
cout << "Neighbor mode: 8邻域." << endl;
NeihborPos.push_back(Point2i(-1, -1));
NeihborPos.push_back(Point2i(-1, 1));
NeihborPos.push_back(Point2i(1, -1));
NeihborPos.push_back(Point2i(1, 1));
}
else cout << "Neighbor mode: 4邻域." << endl;
int NeihborCount = 4 + 4 * NeihborMode;
int CurrX = 0, CurrY = 0;
//开始检测
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (PointLabel.at<uchar>(i, j) == 0)//标签图像像素点为0,表示还未检查的不合格点
{ //开始检查
vector<Point2i>GrowBuffer;//记录检查像素点的个数
GrowBuffer.push_back(Point2i(j, i));
PointLabel.at<uchar>(i, j) = 1;//标记为正在检查
int CheckResult = 0;
for (int z = 0; z < GrowBuffer.size(); z++)
{
for (int q = 0; q < NeihborCount; q++)
{
CurrX = GrowBuffer.at(z).x + NeihborPos.at(q).x;
CurrY = GrowBuffer.at(z).y + NeihborPos.at(q).y;
if (CurrX >= 0 && CurrX<Src.cols&&CurrY >= 0 && CurrY<Src.rows) //防止越界
{
if (PointLabel.at<uchar>(CurrY, CurrX) == 0)
{
GrowBuffer.push_back(Point2i(CurrX, CurrY)); //邻域点加入buffer
PointLabel.at<uchar>(CurrY, CurrX) = 1; //更新邻域点的检查标签,避免重复检查
}
}
}
}
if (GrowBuffer.size()>AreaLimit) //判断结果(是否超出限定的大小),1为未超出,2为超出
CheckResult = 2;
else
{
CheckResult = 1;
RemoveCount++;//记录有多少区域被去除
}
for (int z = 0; z < GrowBuffer.size(); z++)
{
CurrX = GrowBuffer.at(z).x;
CurrY = GrowBuffer.at(z).y;
PointLabel.at<uchar>(CurrY,CurrX)+=CheckResult;//标记不合格的像素点,像素值为2
}
//********结束该点处的检查**********
}
}
}
CheckMode = 255 * (1 - CheckMode);
//开始反转面积过小的区域
for (int i = 0; i < Src.rows; ++i)
{
for (int j = 0; j < Src.cols; ++j)
{
if (PointLabel.at<uchar>(i,j)==2)
{
Dst.at<uchar>(i, j) = CheckMode;
}
else if (PointLabel.at<uchar>(i, j) == 3)
{
Dst.at<uchar>(i, j) = Src.at<uchar>(i, j);
}
}
}
cout << RemoveCount << " objects removed." << endl;
}















 5036
5036











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









