







 该报告由香港科技大学的李佳博士分享,探讨了图神经网络(GNN)在异常检测中的应用。研究发现异常数据会导致图的谱能量向高频转移,提出Beta小波图神经网络(BWGNN)以更好地捕捉这种变化。BWGNN在多个大型数据集上的表现优于现有模型,证明了其在异常检测中的有效性。
该报告由香港科技大学的李佳博士分享,探讨了图神经网络(GNN)在异常检测中的应用。研究发现异常数据会导致图的谱能量向高频转移,提出Beta小波图神经网络(BWGNN)以更好地捕捉这种变化。BWGNN在多个大型数据集上的表现优于现有模型,证明了其在异常检测中的有效性。
目录
2、Rethinking Graph Neural Networks for Anomaly Detection
1、简介
报告嘉宾:李佳(香港科技大学)

报告题目:图异常检测再思考—我们究竟需要怎样的图神经网络?
报告摘要:
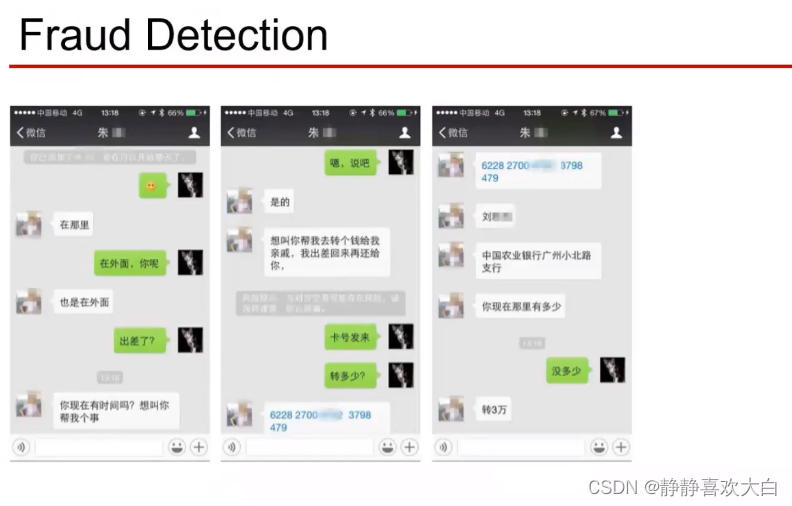
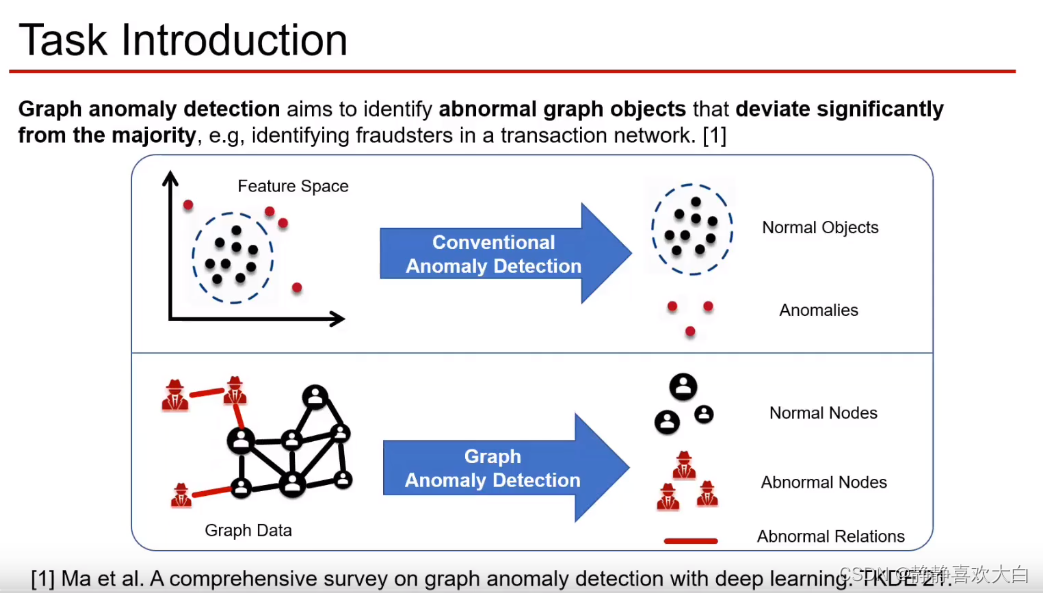
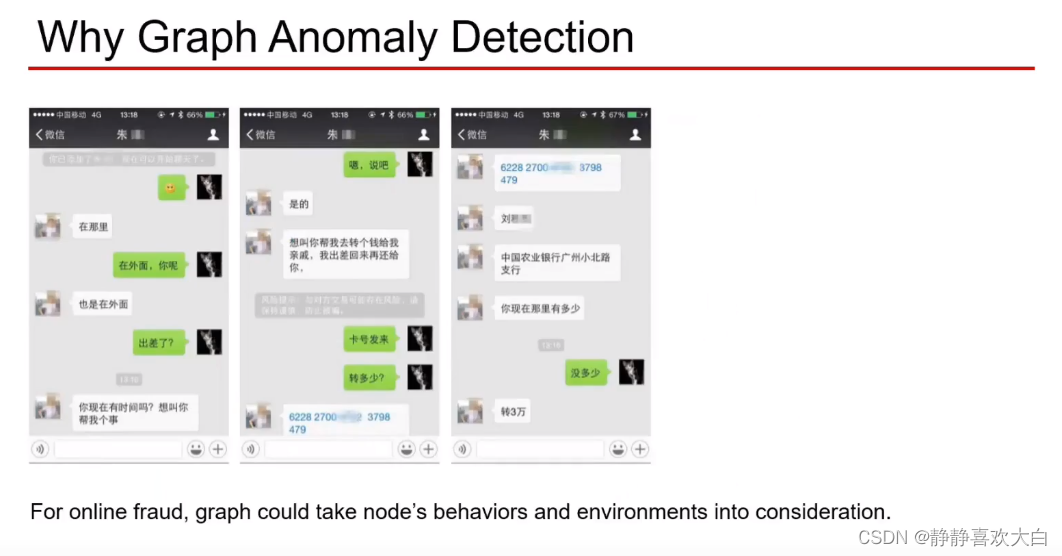
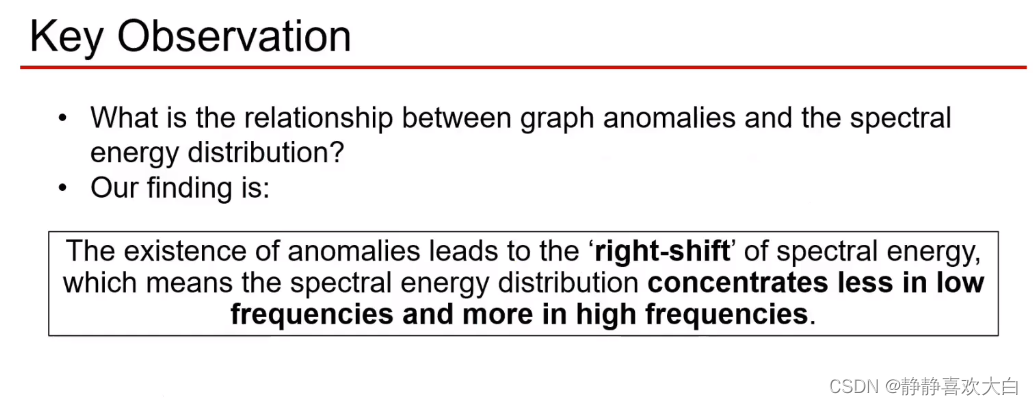
图神经网络(GNN)被广泛应用于结构化数据的异常检测,例如社交网络恶意账号检测、金融交易欺诈检测等。我们首次从谱域的角度分析了异常数据可能造成的影响。核心发现是:异常数据将导致频谱能量出现 “右移” 现象,即频谱能量分布从低频向高频移动。基于这一发现,我们又提出了 Beta 小波图神经网络(BWGNN)。它拥有多个具有局部性的带通滤波器,能够更好捕获 “右移” 产生的高频异常信息。在四个大规模图异常检测数据集上,BWGNN 的性能均优于现有的模型。
报告人简介:
李佳,香港科技大学 计算机系以及香港科技大学(广州) 数据科学与分析学域 助理教授,2021年博士毕业于香港中文大学。李佳博士在工业界有多年的异常检测工作经历,曾供职于Google和腾讯。其研究目前主要为图数据异常检测,可逆图神经网络以及基于图数据的药物生成和医疗健康。
参考文献
1.Rethinking Graph Neural Networks for Anomaly Detection
2.https://github.com/squareRoot3/Rethinking-Anomaly-Detection
2、Rethinking Graph Neural Networks for Anomaly Detection
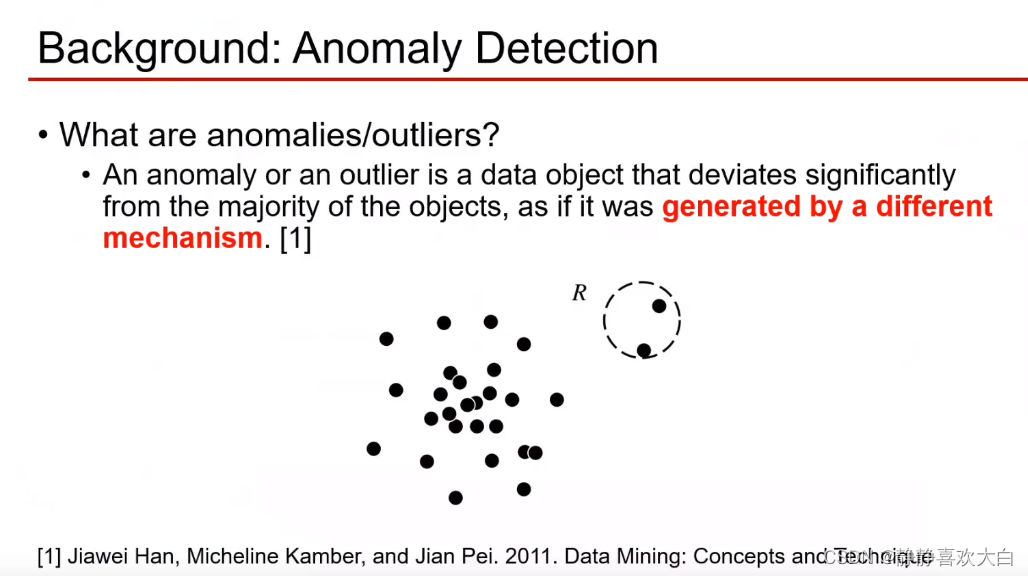
背景
学习模式
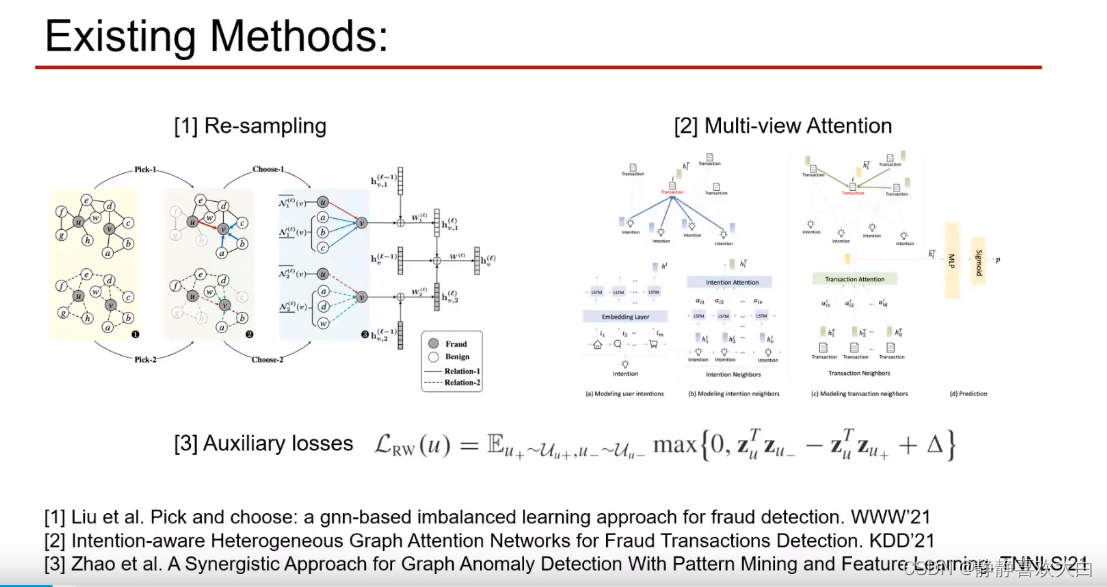
现有图异常检测工作
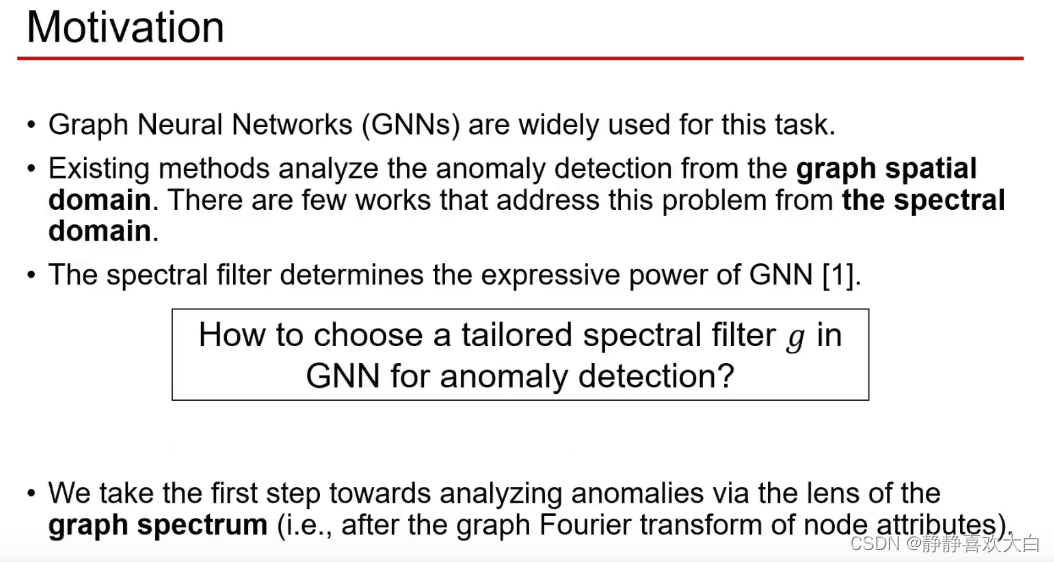
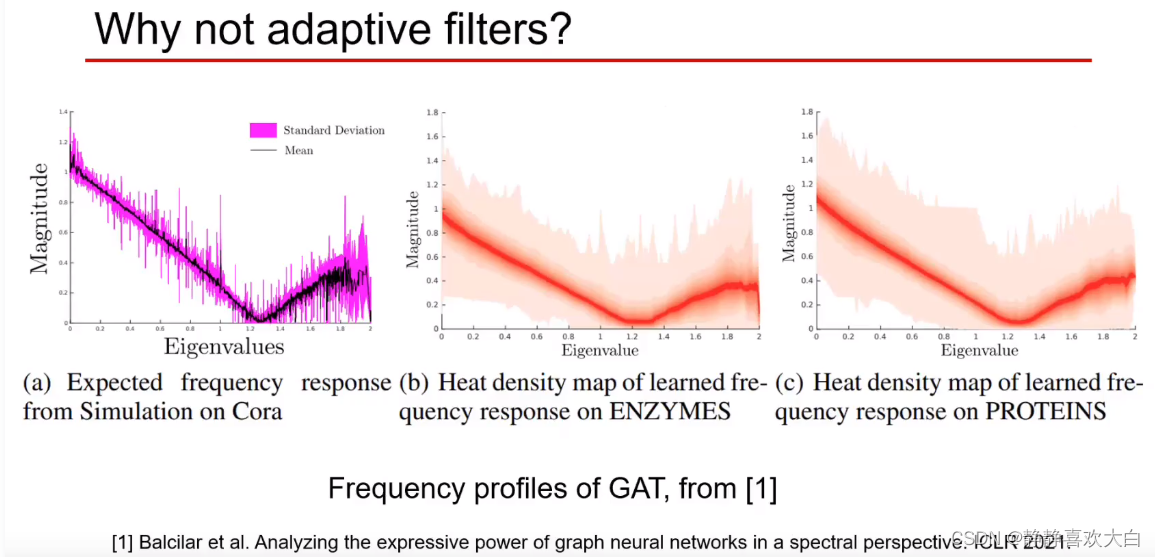
 动机
动机

从找合适的滤波器角度入手
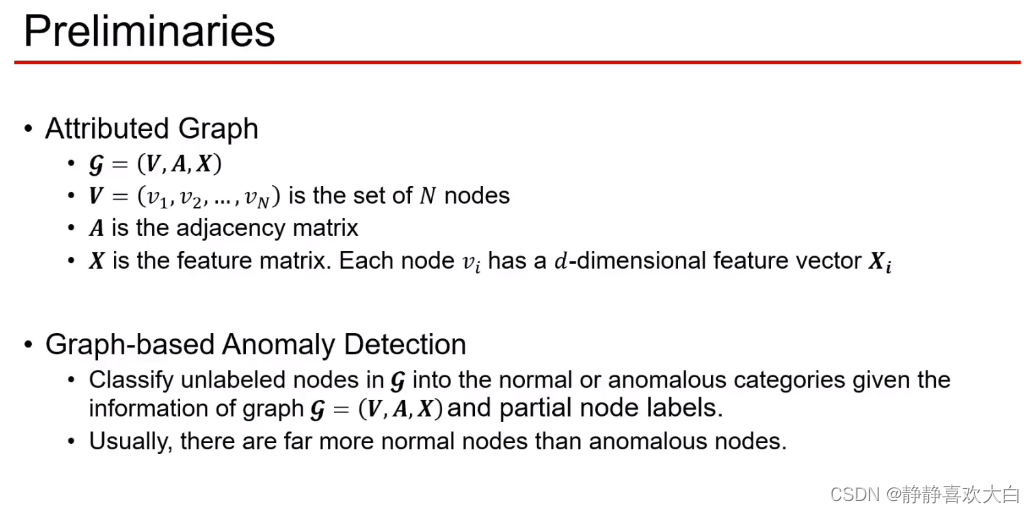
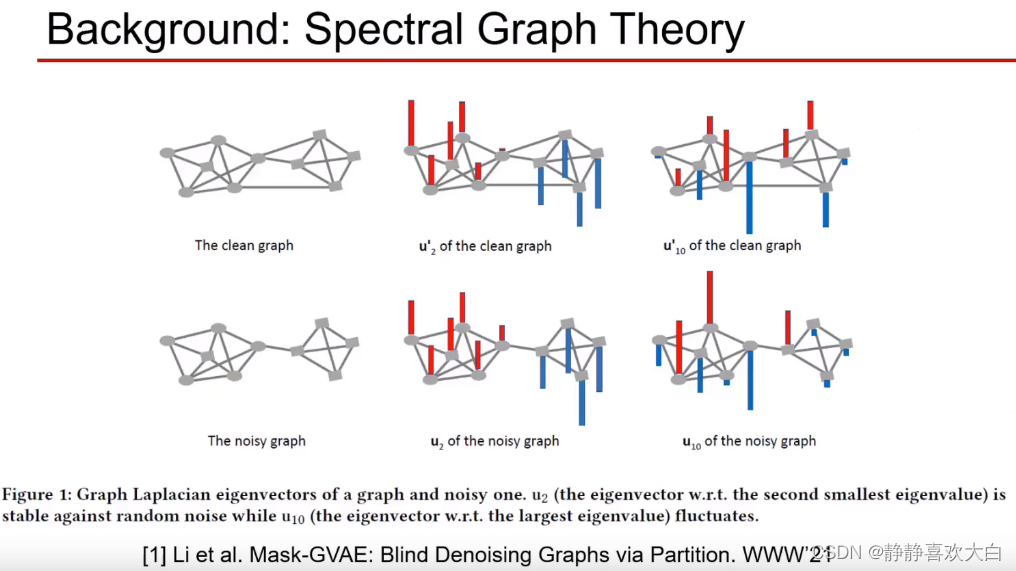
背景知识
图拉普拉斯算子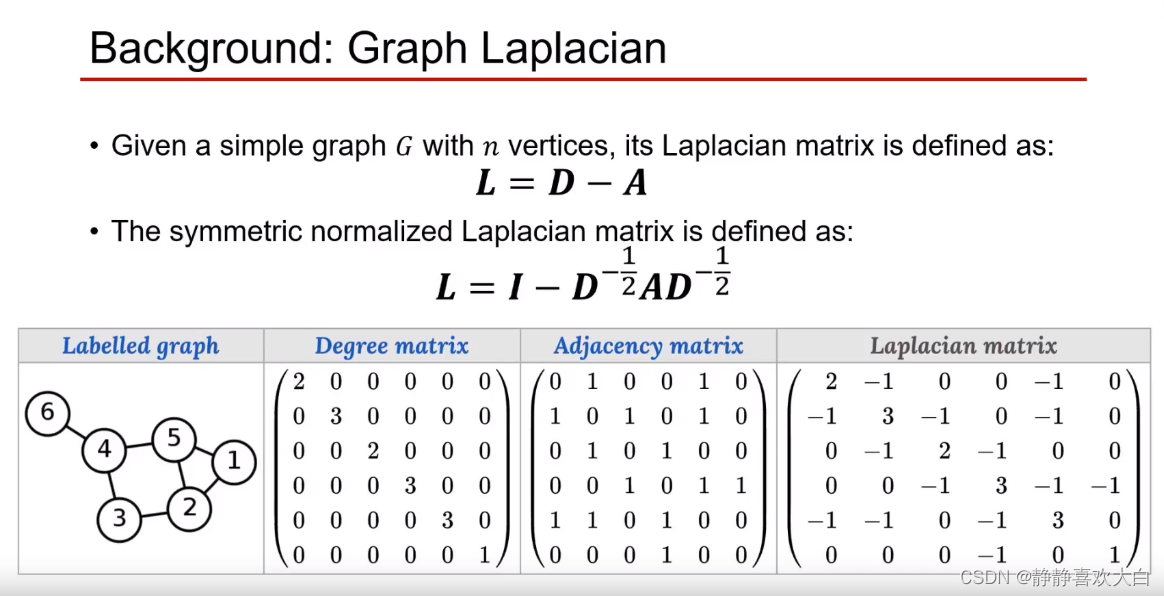
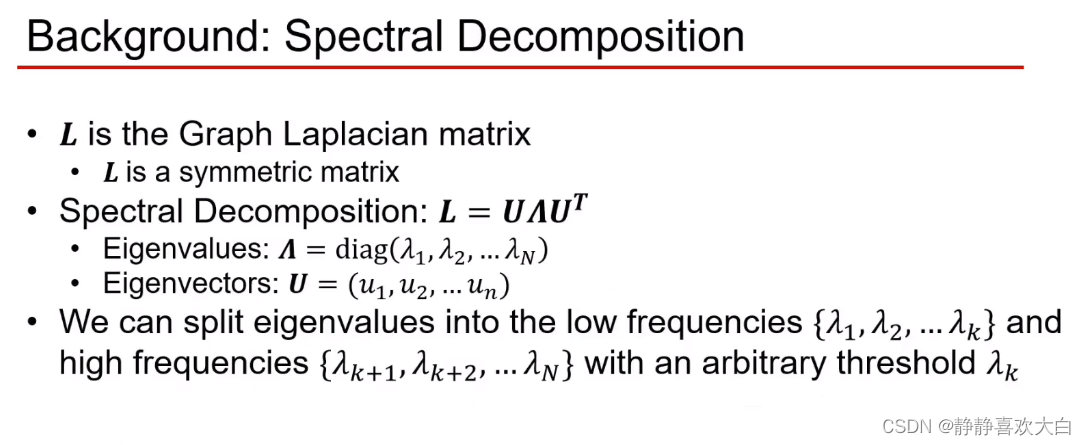
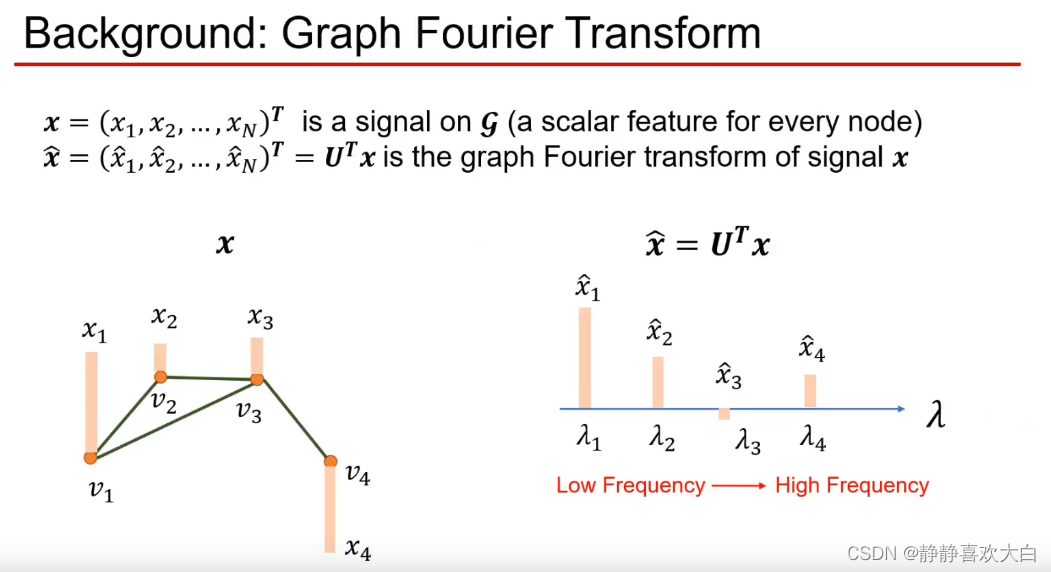
谱分解(外界环境信息)
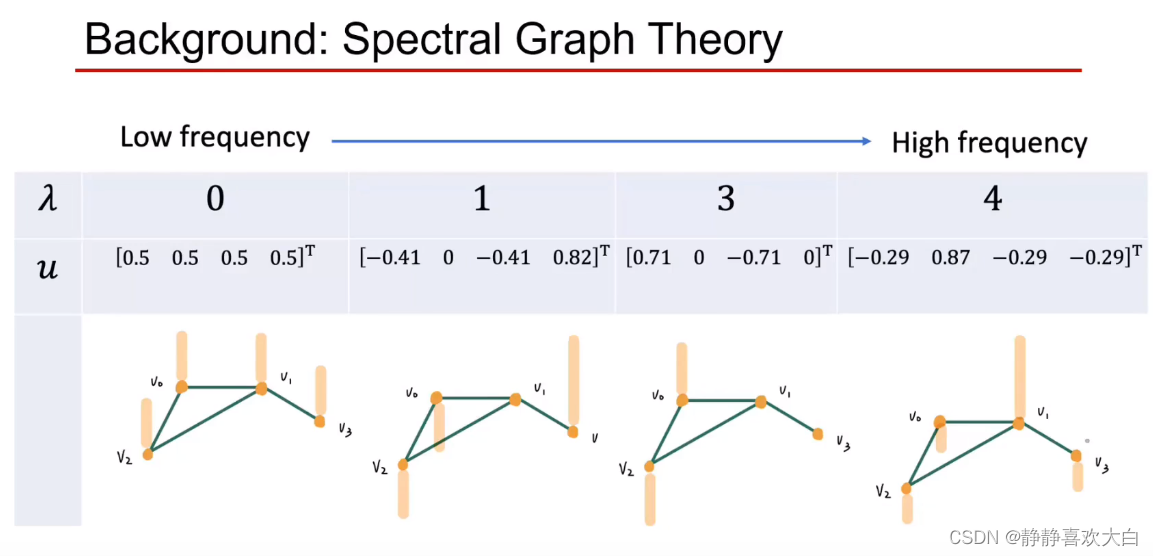
谱聚类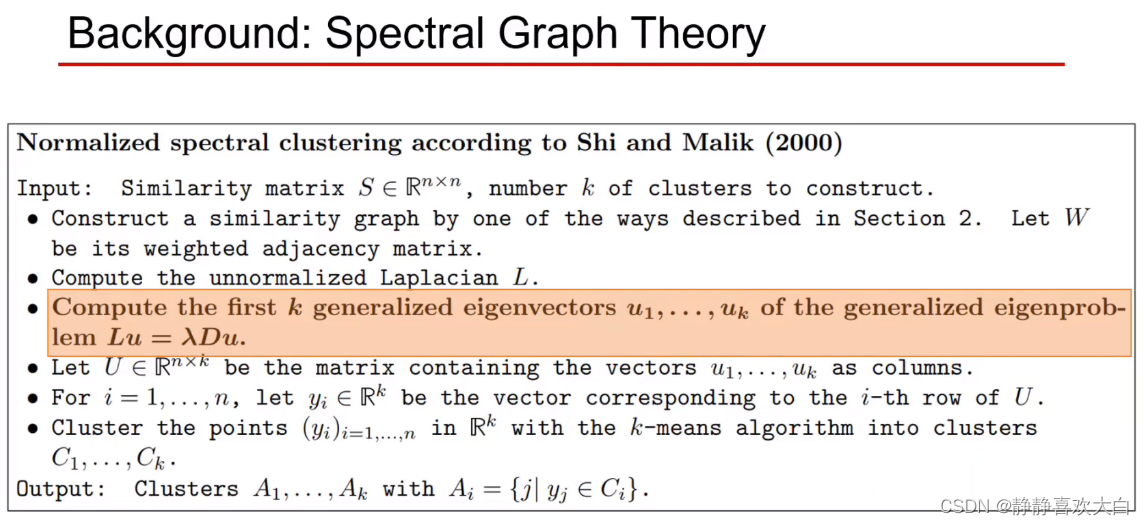
当特征逐渐变多的时候,低频能量向高频转移
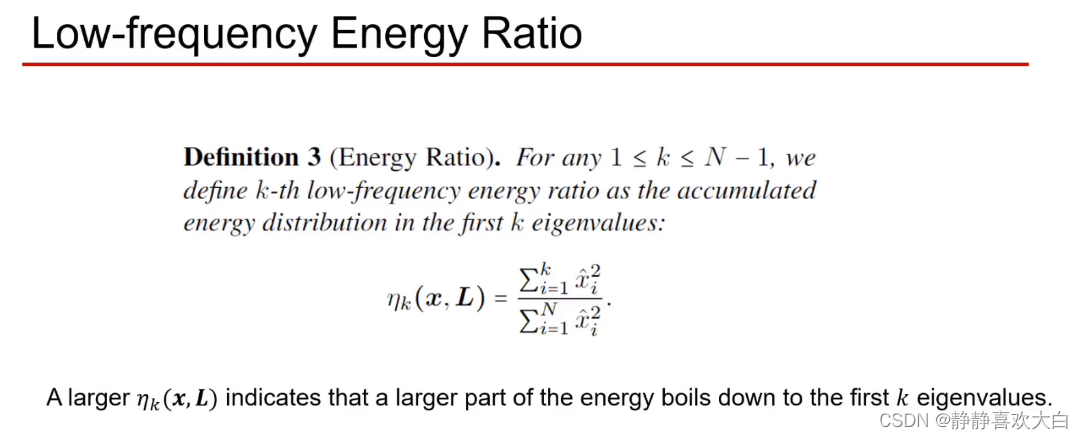
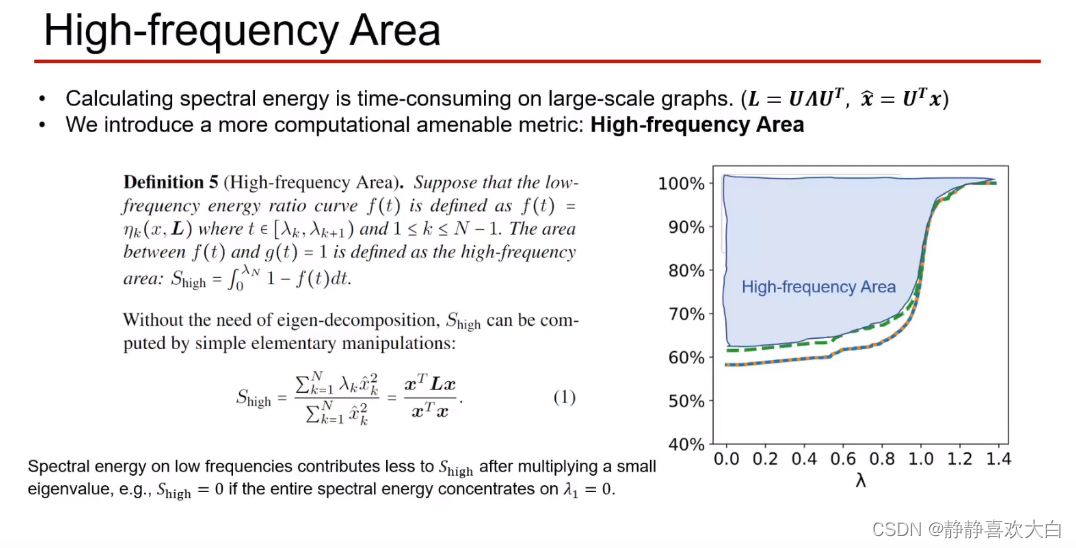
低频能量定义
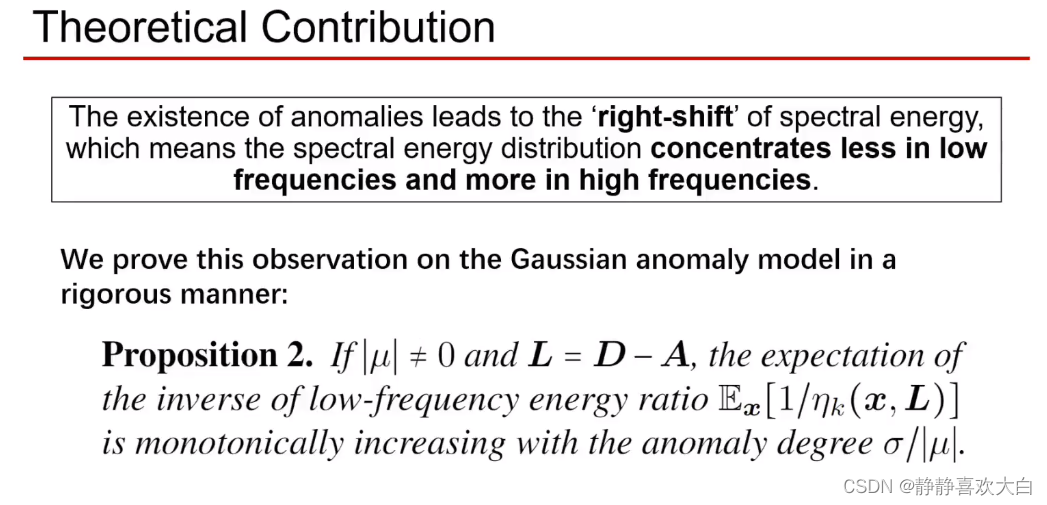
结论
当图中存在异常或者当图中的异常逐渐变大时,谱分解后的能量分布糊逐渐地从低频部分往高频部分转移
通过假设验证结论
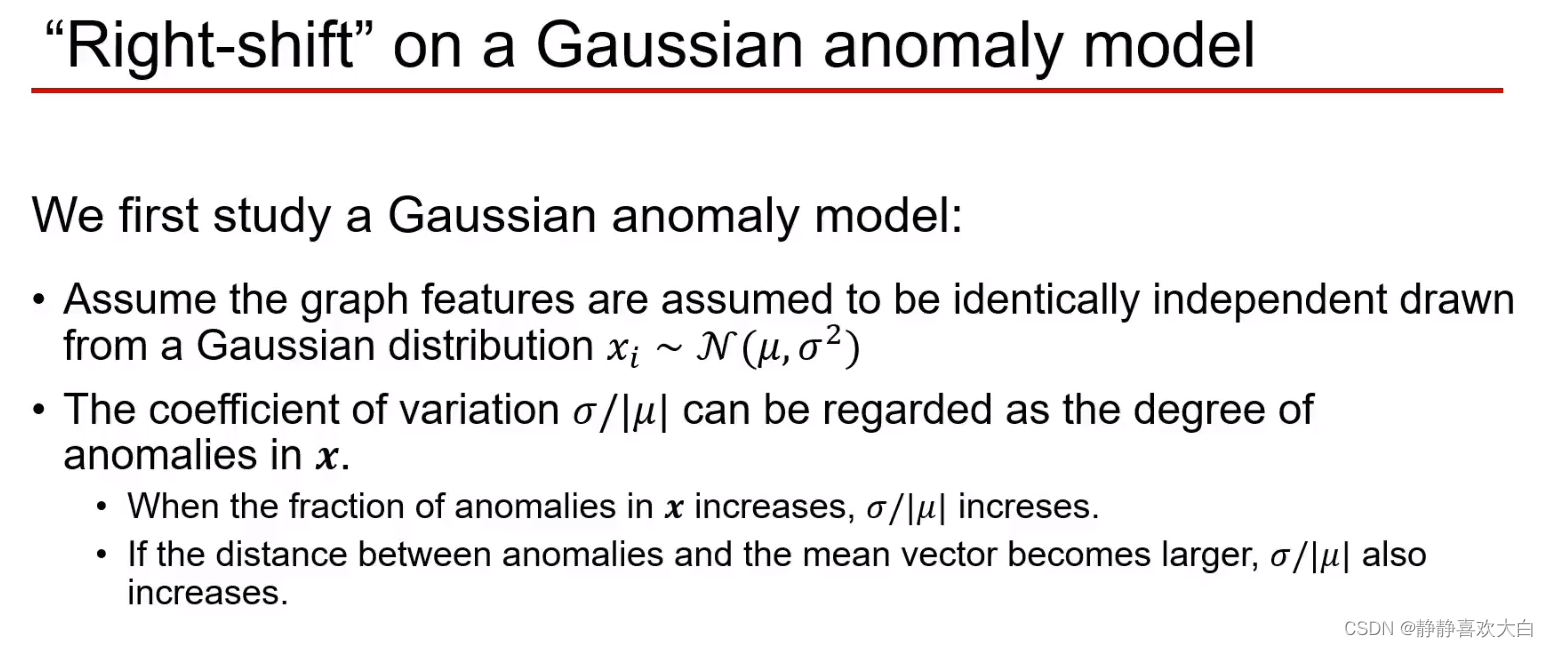
低频特征分量变大则低频能量变小
验证猜想:在合成数据集上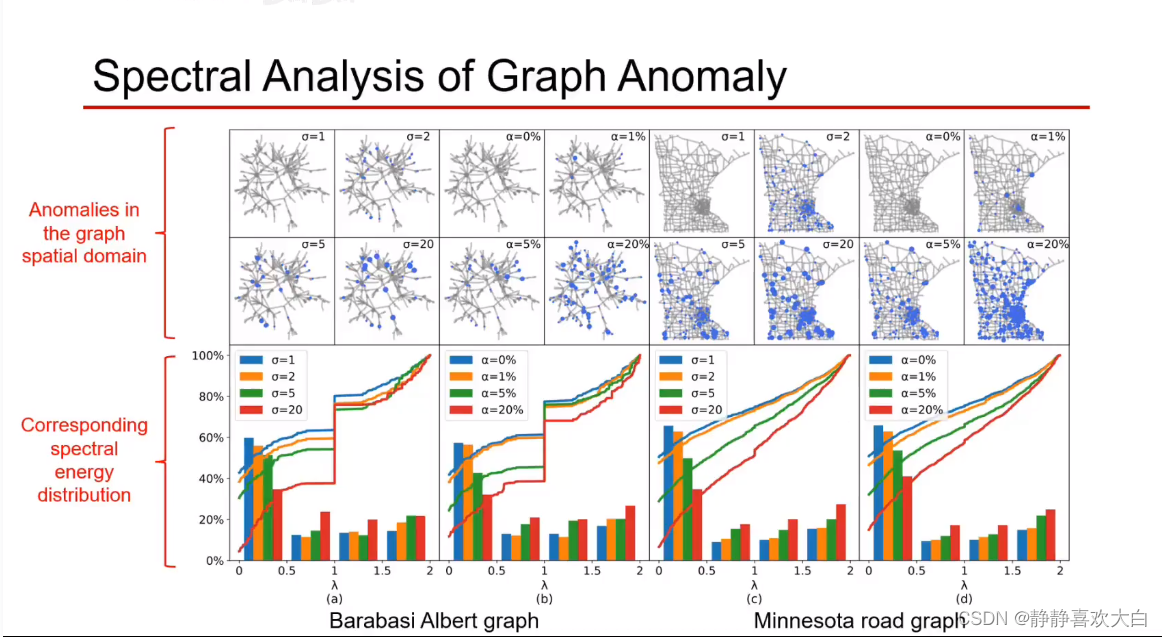
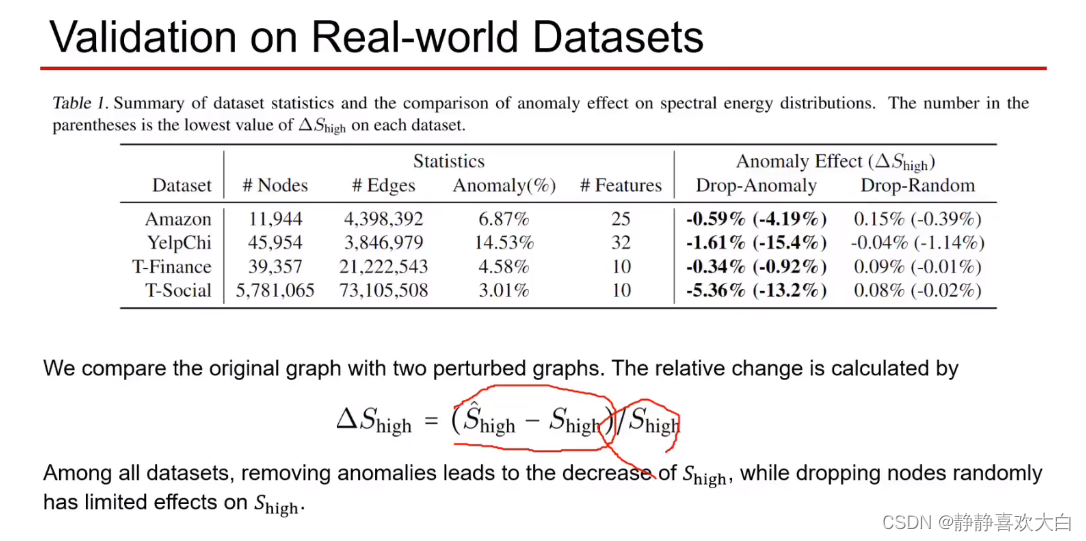
验证猜想:在真实数据集上
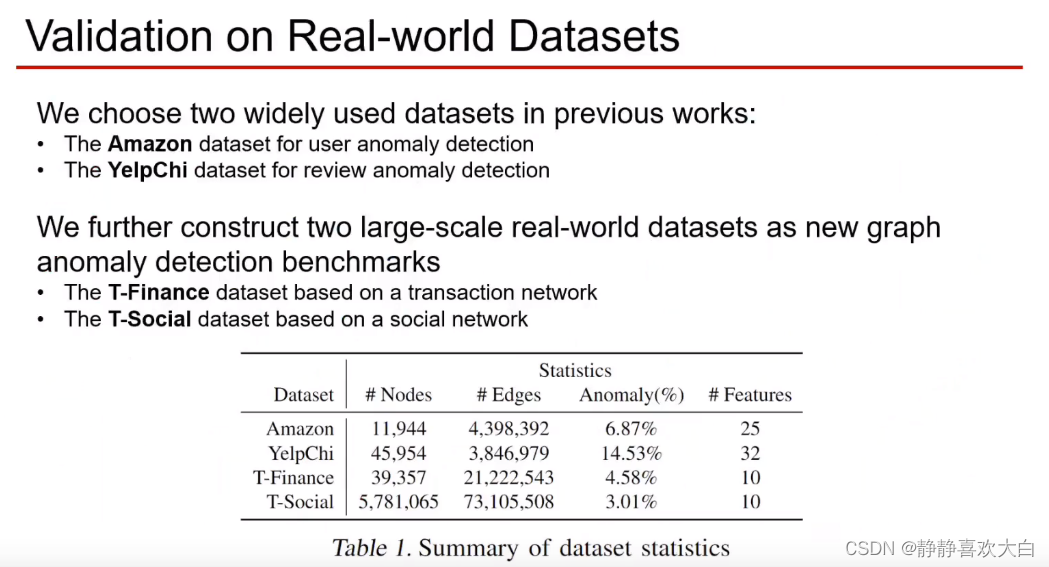
大数据集上验证存在困难,提出新概念
 验证
验证
发现异常减少,低频能量上升(绿色虚线比黄色虚线高)

通过数据值化结果验证
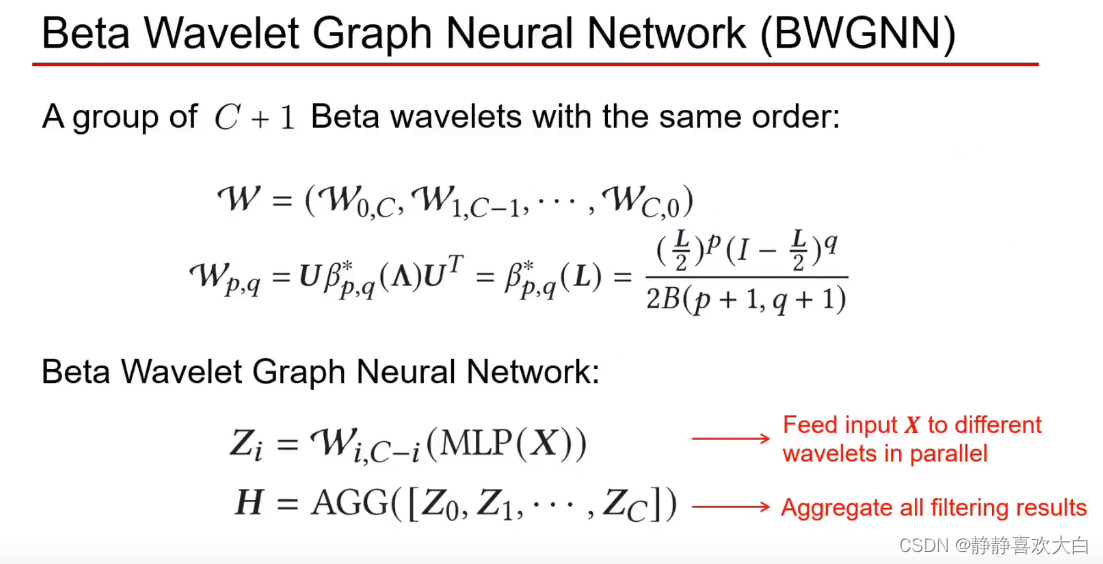
方法
发现小波变换就是低通滤波
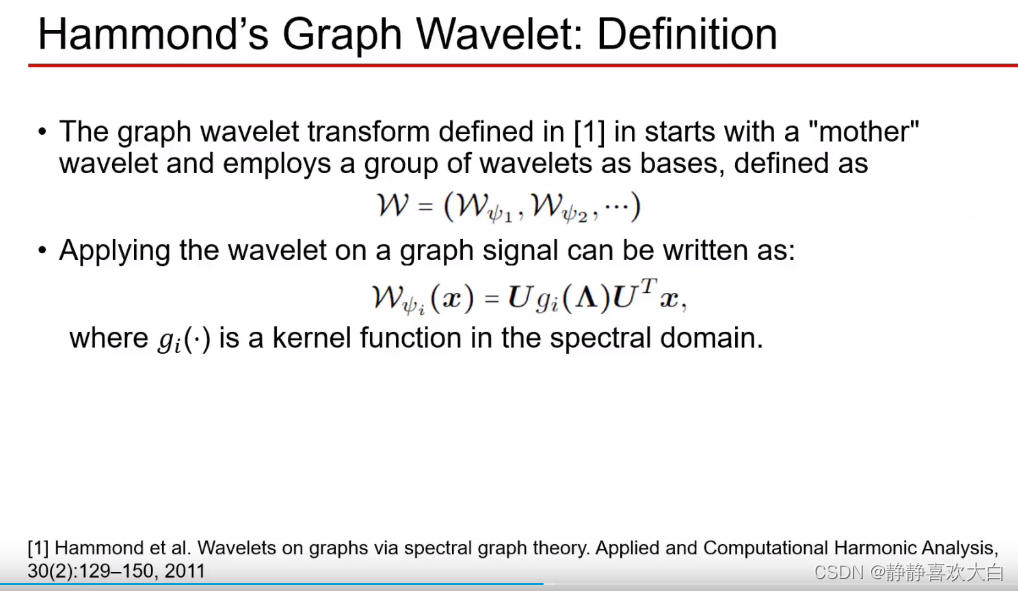
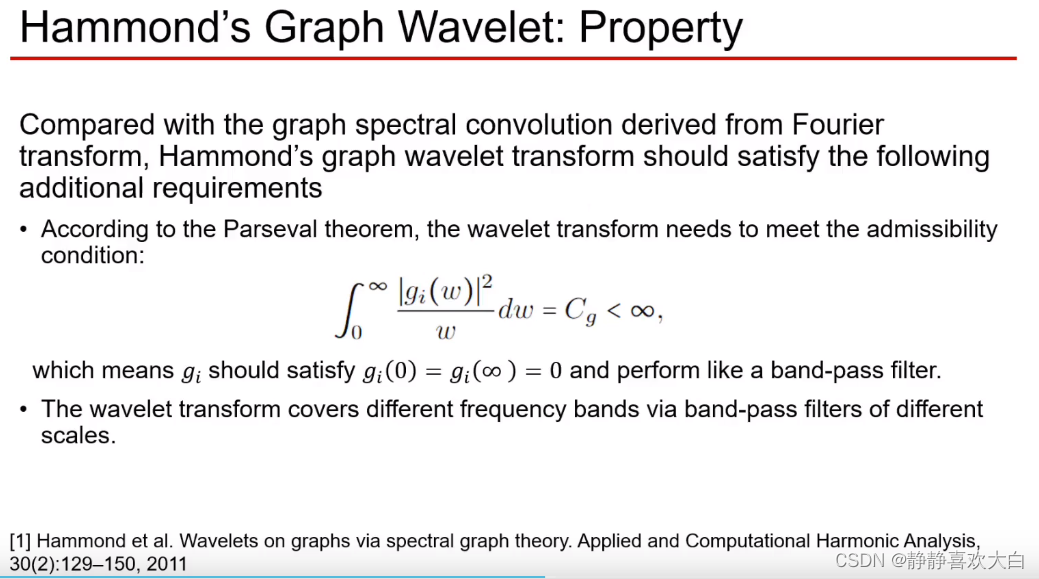
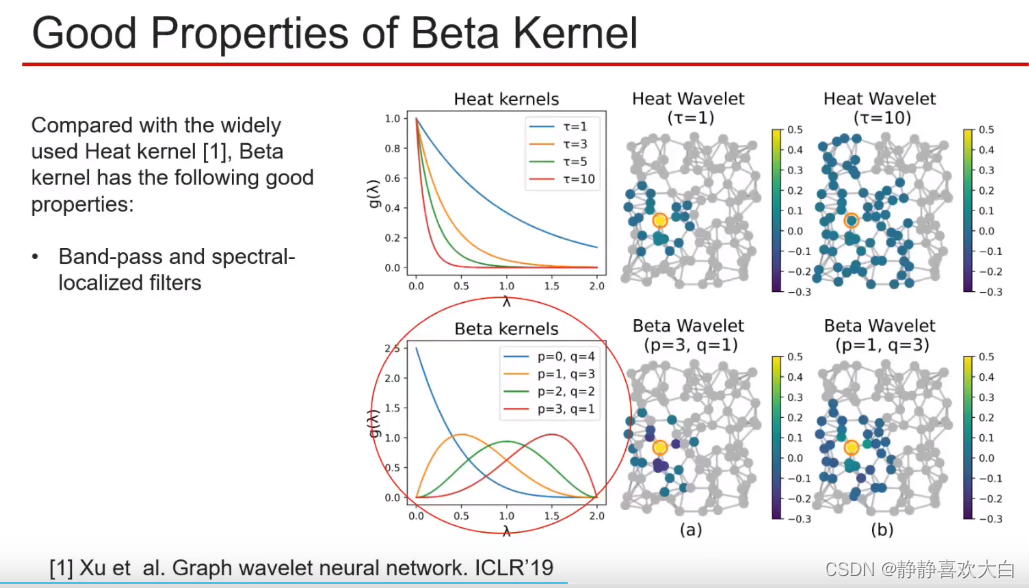
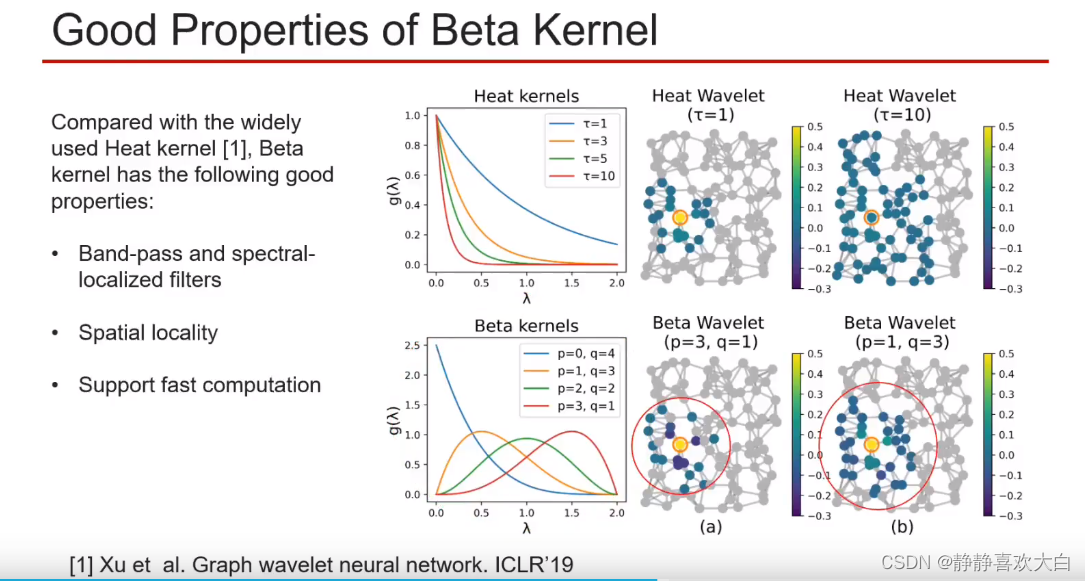
发现小波GNN确实符合,同时确定使用beta kernal的intuition
回到GNN的设计上,依旧遵循MPNN范式
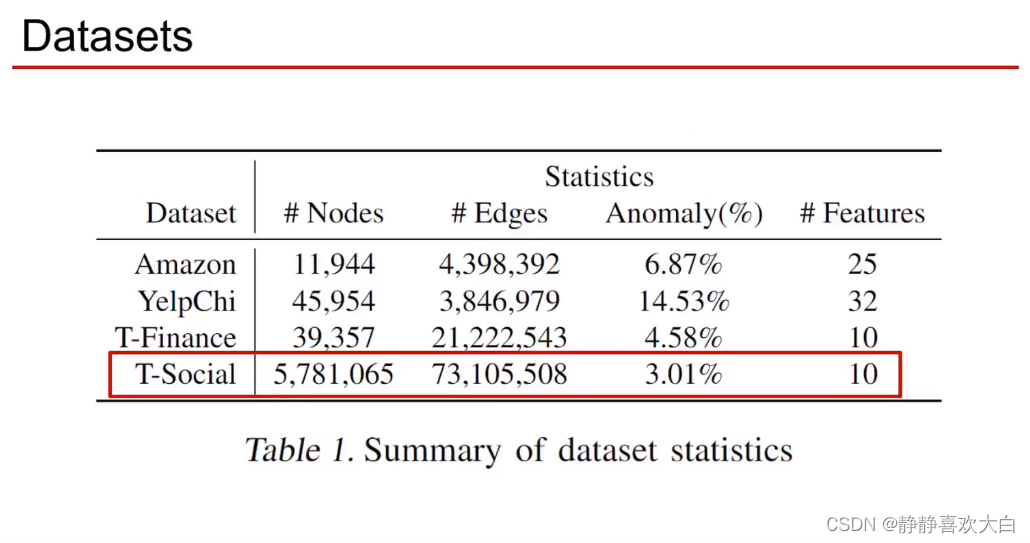
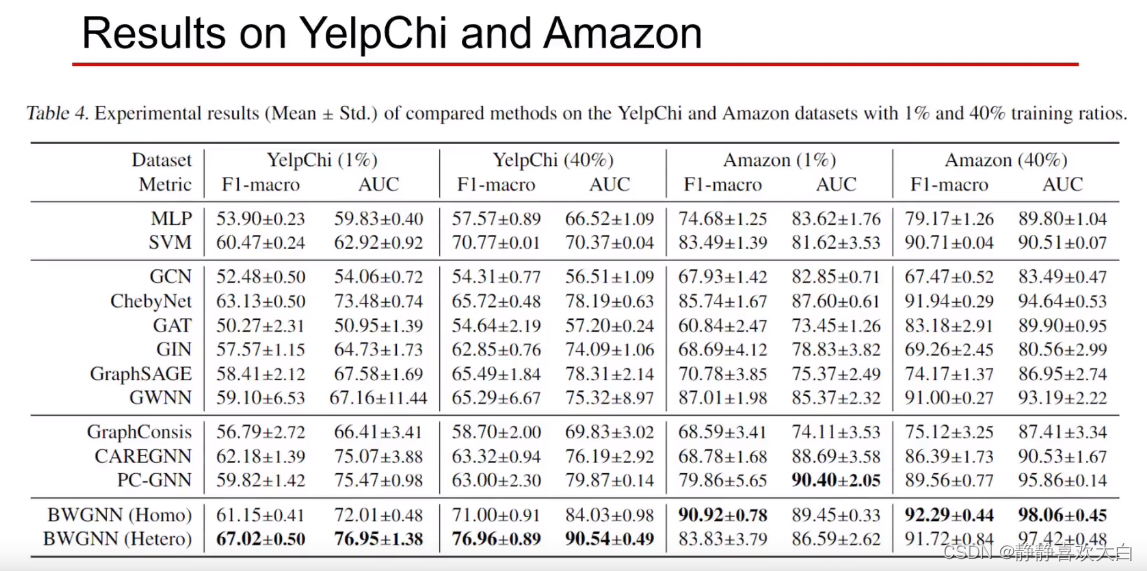
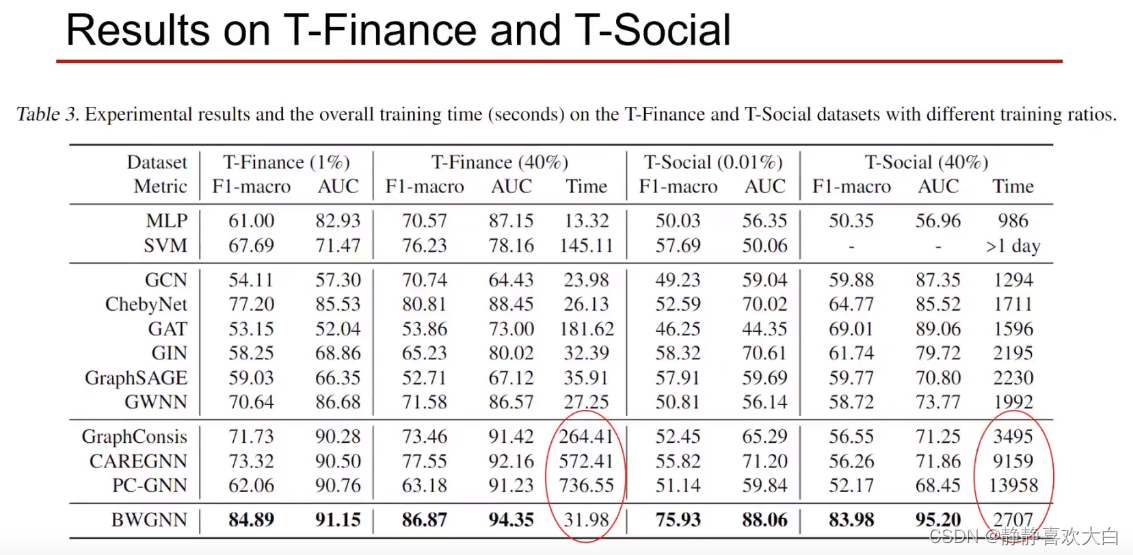
实验
框起来的是大数据集
总结
3、参考
录播视频链接 || 香港科技大学李佳:图异常检测再思考—我们究竟需要怎样的图神经网络?
LOGS 第2022/07/16期 || 香港科技大学李佳:图异常检测再思考—我们究竟需要怎样的图神经网络?_哔哩哔哩_bilibili


















 7722
7722

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











