






霍夫线变换:
效果图:
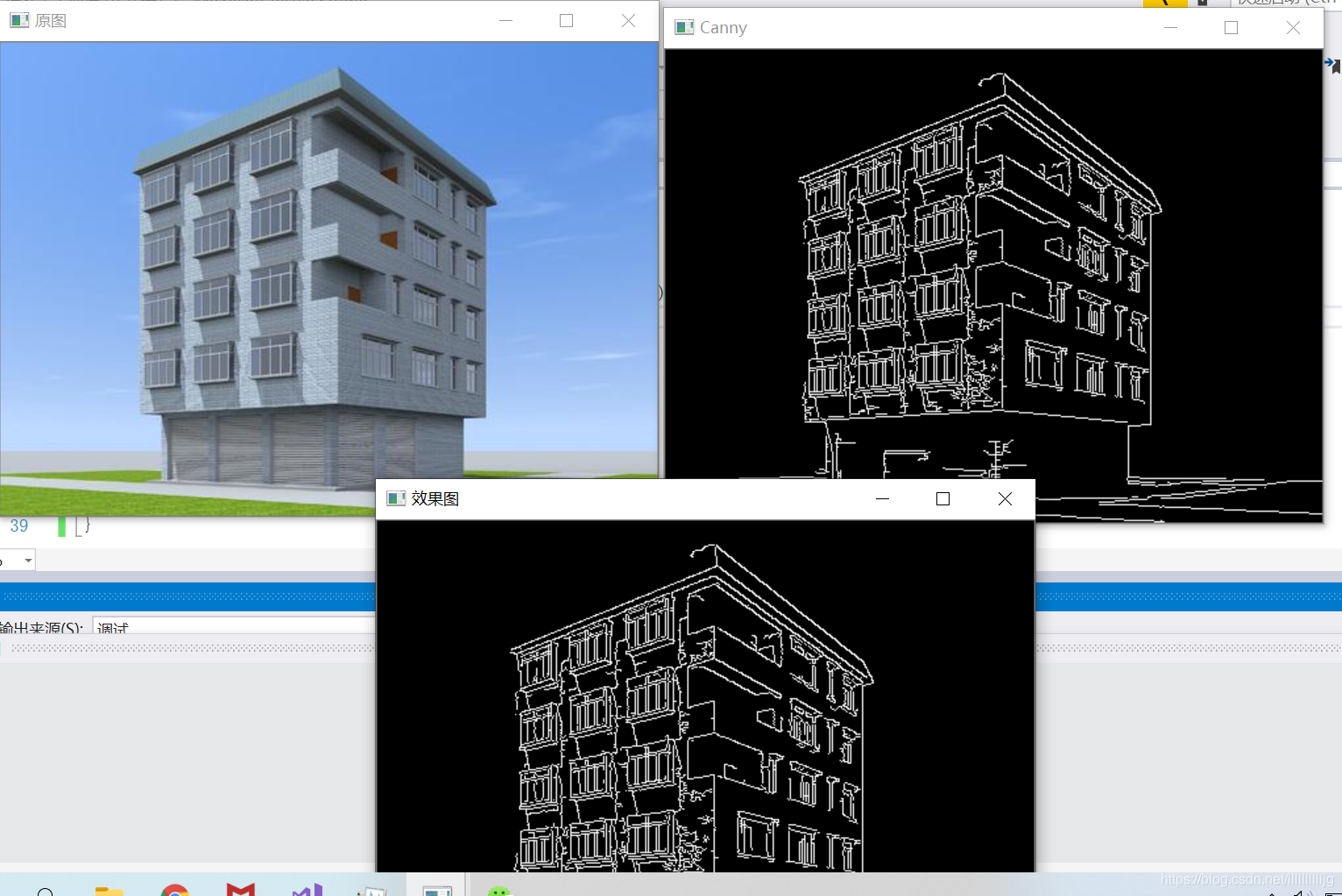
关于霍夫变换线变换的详细介绍
以下是代码:
int main()
{ //载入并显示
Mat src = imread("2.jpg");
imshow("原图", src);
Mat dst, temp;
//边缘检测
Canny(src, temp, 50, 200, 3);
//转化为彩色图
cvtColor(temp, dst, COLOR_GRAY2BGR);
//霍夫变换
vector<Vec2f>lines;
HoughLines(temp, lines, 1, CV_PI / 180, 150, 0, 0);
for (size_t i = 0; i < lines.size(); i++)
{
float rho = lines[i][0], theta = lines[i][1];
Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 = 1000 * (-b));
pt1.y = cvRound(y0 = 1000 * (a));
pt2.x = cvRound(x0 = 1000 * (-b));
pt2.y = cvRound(y0 = 1000 * (a));
line(dst, pt1, pt2, Scalar(0,0,255), 1, LINE_AA);
imshow("Canny", temp);
imshow("效果图", dst);
}
waitKey(0);
return(0);
}
效果图怎么跟边缘检测的图一样?
line(dst, pt1, pt2, Scalar(0,0,255), 1, LINE_AA);
修改scalar()中的值颜色怎么不改变?
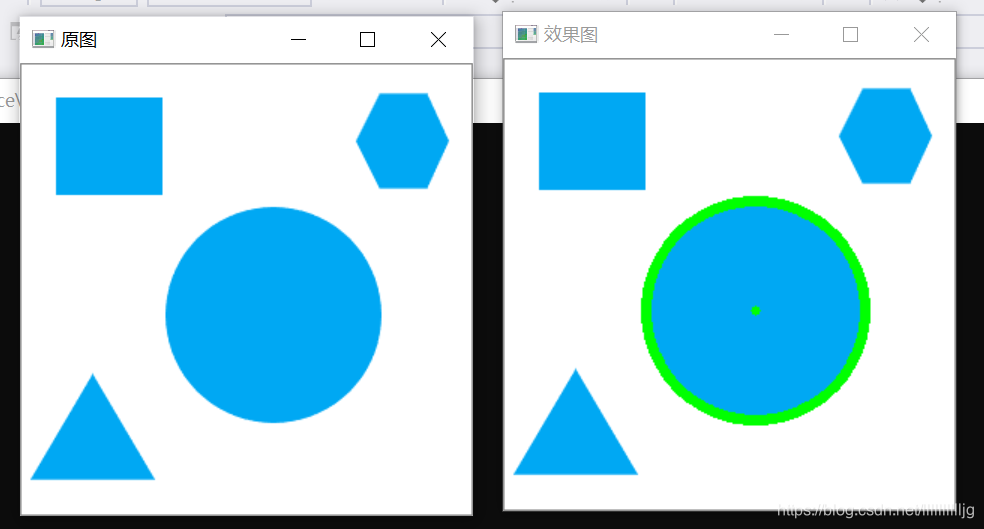
霍夫圆变换
void HoughCircles(InputArray image,OutputArray circles, int method, double dp, double minDist, double param1=100,double param2=100, int minRadius=0, int maxRadius=0 )
第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的灰度单通道图像。
第二个参数,InputArray类型的circles,经过调用HoughCircles函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了3个元素的浮点矢量(x, y, radius)表示。
第三个参数,int类型的method,即使用的检测方法,目前OpenCV中就霍夫梯度法一种可以使用,它的标识符为CV_HOUGH_GRADIENT,在此参数处填这个标识符即可。
第四个参数,double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度。
第五个参数,double类型的minDist,为霍夫变换检测到的圆的圆心之间的最小距离,即让我们的算法能明显区分的两个不同圆之间的最小距离。这个参数如果太小的话,多个相邻的圆可能被错误地检测成了一个重合的圆。反之,这个参数设置太大的话,某些圆就不能被检测出来了。
第六个参数,double类型的param1,有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示传递给canny边缘检测算子的高阈值,而低阈值为高阈值的一半。
第七个参数,double类型的param2,也有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了。
第八个参数,int类型的minRadius,有默认值0,表示圆半径的最小值。
第九个参数,int类型的maxRadius,也有默认值0,表示圆半径的最大值。
例子如下:
int main()
{
Mat src = imread("2.jpg");
imshow("原图", src);
Mat gray;
cvtColor(src,gray,COLOR_BGR2GRAY);//转化为灰度图
//高斯模糊
GaussianBlur(gray, gray, Size(9, 9), 2, 2);
//进行霍夫圆变换
vector<Vec3f>circles;
HoughCircles(gray,circles,HOUGH_GRADIENT,1.5,10,200,100,0,0);
for (size_t i = 0; i < circles.size(); i++)
{//定义参数
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(cvRound(circles[i][2]));
//绘制圆心
circle(src, center, 3, Scalar(0, 255, 0), -1, 8, 0);
//绘制轮廓
circle(src, center, radius, Scalar(0, 255, 0), 3, 8, 0);
}
imshow("效果图", src);
waitKey(0);
return(0);
}
效果图:















 304
304











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









