






使用命令行,GDB调试如下:
https://blog.csdn.net/qq_41451702/article/details/135252964
https://www.cnblogs.com/_bob/p/18140351
但是测试下来不好用
使用下面的方法:
在 vscode 中进行 ROS2 C++ 断点调试 - 知乎 (zhihu.com)
关键点:
1. 安装ROS插件

2、编译
colcon build \
--cmake-args -DCMAKE_BUILD_TYPE=RelWithDebInfo\
-Wall -Wextra -Wpedantic \
-DCMAKE_EXPORT_COMPILE_COMMANDS=ON \
--symlink-install3、创建/修改配置文件
在setting.json中添加
"ros.distro": "humle",
"ros.rosSetupScript": "${workspaceFolder}/install/setup.bash"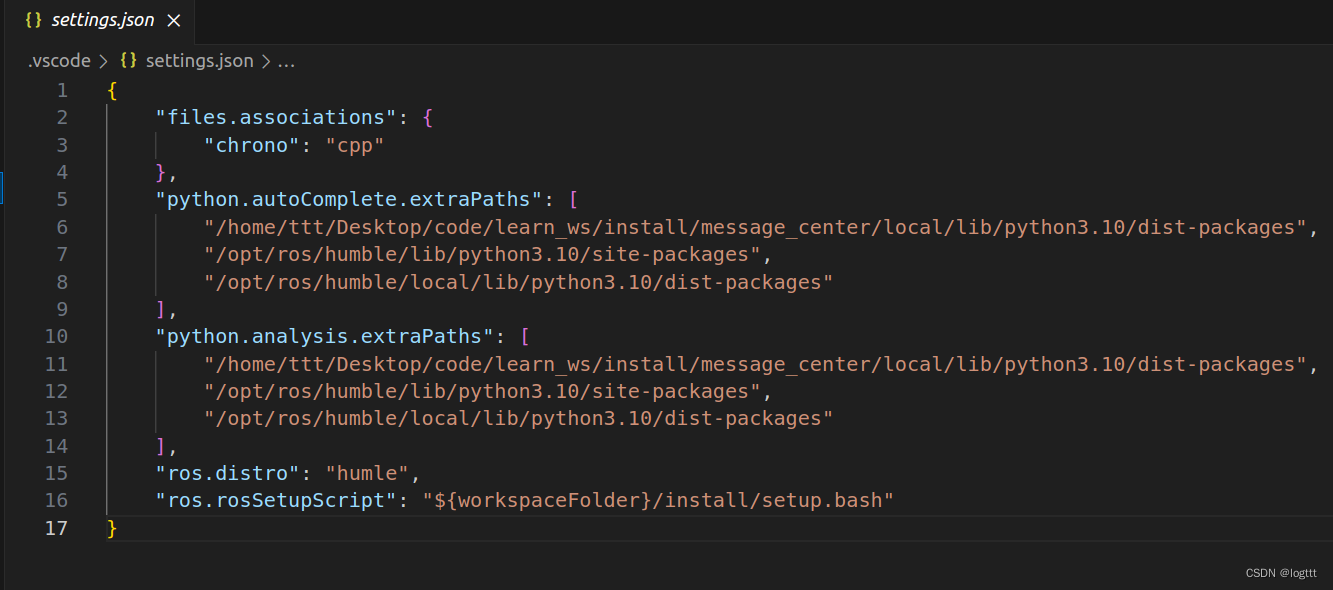
4、创建 launch.json 文件
如果是全部节点调试
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "ROS: Launch my file",
"request": "launch",
"target": "${workspaceFolder}/install/agv_position_control/share/agv_position_control/launch/agv_navigation.launch.py",
"launch": ["rviz", "gz", "gzserver", "gzclient"],
"type": "ros"
}
]
}如果是单个节点(见上文连接,我这里没有试过)
// rest of code ...
{
"name": "C++ Debugger",
"request": "launch",
"type": "cppdbg",
"miDebuggerServerAddress": "localhost:3000",
"cwd": "/",
"program": "${workspaceFolder}/install/sub_pub/lib/sub_pub/sub"
}
// rest of code ...5、点击调试

会自动选择launch.json文件
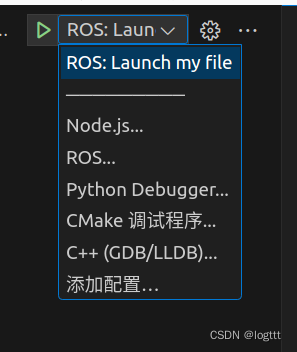
点击左边按钮,便可以进行调试,断点可以正常运行
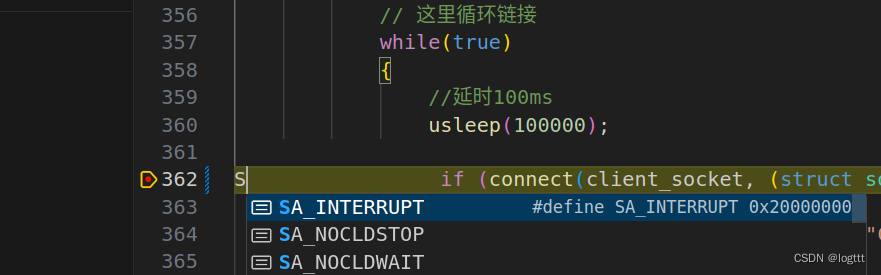
并且出现调试界面如下,可以愉快玩耍ROS2了!!!
这个调试方法非常重要,可以提高研发效率,怕原连接失效,故记录在此。















 399
399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









