






写在前面
本文是一位毕业的研究生,研究生期间主要从事SLAM智能小车的研究。期间阅读过很多开源代码,也亲自动手复现,对一些算法也加入了一些自己独特的见解。毕业后工作换了个方向,与SLAM方向基本不沾边,所以想将自己在研究生期间的所有工作做一些总结,其中也遇到很多坑对一些问题进行记录,希望能对大家有些帮助。本系列文章主要围绕SLAM小车制作的整个过程进行描述,因此小白也能从头开始进行了解与学习
什么是SLAM
SLAM(simultaneous localization and mapping)全称即时定位与地图构建或并发建图与定位,它主要的作用是让机器人在未知的环境中,完成定位(Localization),建图(Mapping)和路径规划(Navigation)。
按照我的理解就是,机器人的无人驾驶。在一个陌生环境,机器人通过自生传感器,比如激光、摄像头,对环境进行探索,记录环境所有障碍物的位置,以地图的形式展现出来。使得机器人在路径规划和行进过程中可以提前做出避障得行为。
机器人得组成部分
机器人的部件包括车身、电机、编码器、底层控制器、上层计算机、传感器。
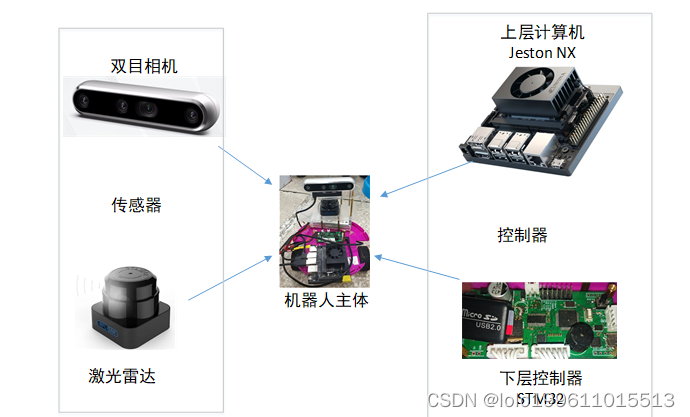
1、电机作为机器人的动力机构,提共机器人前进的同时通过编码器反馈机器人的里程信息。机器人需要知道行进距离,辅助自己定位。因此对电机需要精准的闭环控制,对电机的控制一般通过下层控制器PID算法进行闭环以及里程信息反馈。对于电机的布置也有两轮、三轮、四轮以及麦克拉姆轮的形式。需要对不同的驱动方式运动学建模,在数学层面上对电机精准控制。
2、下层控制器,主要对一些传感器数据进行采集,例如编码器、IMU,超声波等数据以及对电机模型进行数学建模算法实现,此外将数据以串口的形式传给上层计算机。
3、上册计算机,负责SLAM算法的运算机总程序的总控制。可以是笔记本计算机也可以是性能好一点的嵌入式设备。
4、传感器分为激光传感器,视觉传感器、IMU等。
制作步骤
1、底层驱动版设计
2、小车车身设计
3、电机运动控制代码编写
4、小车控制验证
5、IMU传感器程序编写
6、Ubuntu环境搭建
7、Linux基本命令
8、ROS环境搭建
9、ROS编程示例
10、底层和上层通信实现
11、上层控制小车程序编写
12、基于卡尔曼滤波里程计融合
13、Gmapping的基本原理
14、Gmapping算法复现
16、Karto基本原理
17、Karto复现
18、视觉SLAM框架
19、ORBSLAM基本原理
20、ORBSLAM运用于ROS
21、ORBSLAM3复现














 160
160











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









