






文章目录
原文链接,点击跳转
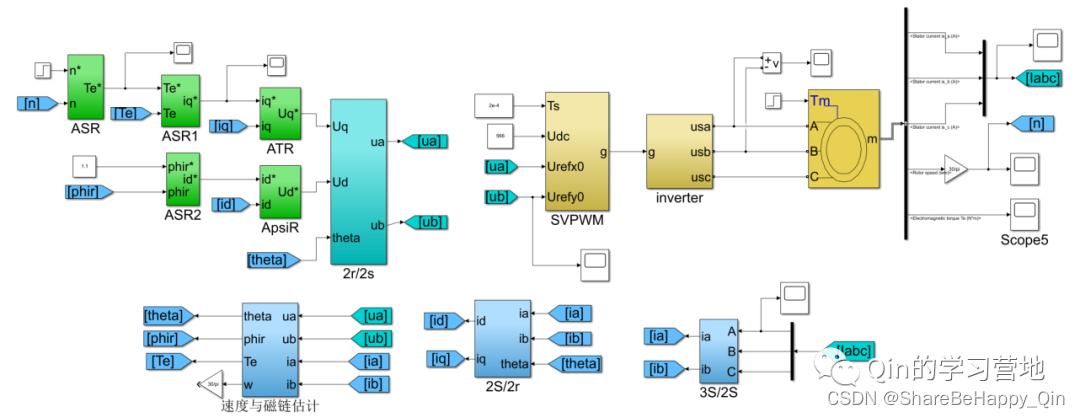
三相异步电机动态数学模型及矢量控制仿真
本文带你一步步推倒三相异步电机动态数学模型,按基于转子磁链定向的矢量控制进行 matlab 仿真,实现较好的控制效果。
1、异步电机三相方程
2、坐标变换
3、磁链3/2变换推导
4、两相静止坐标系下的方程
5、两相旋转坐标系下的方程
6、以 ω-is-Ψr 为状态变量的状态方程
7、矢量控制及 matlab 仿真

需要仿真的同学请关注【Qin的学习营地】


本文带你一步步推倒三相异步电机动态数学模型,按基于转子磁链定向的矢量控制进行 matlab 仿真,实现较好的控制效果。
需要仿真的同学请关注【Qin的学习营地】
 3721
3万+
3721
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























