






源自:系统工程与电子技术
作者:苗学问, 董骁雄, 钱征文, 胡杨, 李牧东
“人工智能技术与咨询” 发布
摘 要
保障系统结构建模是发展和构建新一代航空装备智能保障系统的重要基础。航空装备保障系统涉及保障要素多、交联关系复杂, 需从系统工程的角度开展顶层设计, 并采用统一的结构框架对其体系结构进行建模表征。引入美国国防部架构框架(Departmeant of Defense Architecture Framework, DoDAF)体系结构框架, 提出基于“概念-任务-能力”的体系结构开发序列, 构建航空装备智能保障系统的能力、保障活动、各保障要素的信息交互及组织关系等视图模型, 得到“能力层-需求层-技术层”之间的对应关系。该方法能够全面地描述航空装备智能保障系统体系结构, 提高不同保障要素之间的互操作性, 并将其转化为具体的设计要求, 可为航空装备智能保障系统开发提供支持。
关键词
航空装备, 智能保障系统, 美国国防部架构框架, 基于模型的系统工程
引言
保障系统是指使用与维修装备所需的保障资源及其管理的有机组合[1], 是装备系统不可或缺的要素, 保障系统对在有限的经费条件下最大化发挥装备作战效能具有重要意义。
当前, 人工智能、高性能计算、大数据、传感网等先进技术不断加速发展, 引领诸多行业实现重大突破[2], 同时为装备保障系统向智能化演进提供了先决条件[3]。2020年, 美国国防部宣布采用新的“作战数据集成网络(operational data integrated network, ODIN)”系统取代F-35“自主保障信息系统(autonomic logistics information system, ALIS)”, 并计划在未来两年内将ODIN基地套件(ODIN base kit, OBK)全面部署至F-35中队[4]。ODIN系统的开发基于商业云技术, 包括现代化的硬件、系统架构、软件开发方法、数据环境和平台。ODIN提供了一套智能信息基础设施, 将F-35 ALIS的所有关键概念绑定到一个更加轻量和高效的系统中, 在F-35飞机、作战人员、训练系统、政府信息技术系统和保障的商业企业系统之间建立了适当的接口, 为飞机的数据收集和分析、决策支持和行动跟踪提供了一个综合工具, 实现了保障的先导化、敏捷化和智能化, 是对航空装备保障系统的重大变革。
目前, 国内针对装备智能保障的研究还处于起步阶段, 文献[5]在传统装备保障概念的基础上, 回顾了近30年来武器装备升级换代所带来的军事变革, 根据人工智能技术支持的航空装备保障范畴, 提出航空装备智能保障体系构建的思路。文献[6]剖析了高端对抗条件下航空装备保障现状、问题和需求, 提出智能保障系统的概念、目标图像, 从态势感知、行动决策、作业执行、评估验证4个方面论证了发展智能保障系统的关键技术。文献[7]总结了智能保障发展趋势, 提出基于数字孪生的装备智能保障体系结构, 对装备保障体系中的数字孪生等关键技术进行了阐述。文献[8]分析了航空装备智能保障场景, 梳理了智能保障系统的关键技术, 对以“智能”为特征的下一代航空装备保障系统进行了初步研究。文献[9]分析了人工智能应用对装备保障决策、保障管理、保障力量结构和保障方式的影响, 提出了建立统一规范的标准体系和智能保障系统模块等对策建议。
上述文献主要从概念、场景、目标、关键技术和发展趋势等角度对装备智能保障系统进行了探索性研究, 尚未对保障系统的体系架构进行系统化的建模表征, 难以有效牵引智能保障系统数据架构、应用架构和技术架构的开发。因此, 本文从顶层设计理念出发, 设计一种基于美国国防部架构框架(Department of Defense Architecture Framework, DoDAF)的航空装备智能保障系统体系架构, 给出航空装备智能保障顶层、全面的描述, 为构建航空装备智能保障系统、加快航空装备保障智能化建设提供理论依据。
1 基于DoDAF的体系结构建模方法
1.1 DoDAF概述
美国从20世纪90年代开始研究新的系统工程思想, 总结复杂军事大系统的多年开发经验, 军事需求生成逐步向基于能力转变[10-12]。为了改变各联合司令部、各军兵种、国防部各业务局自底向上构建、统一集成困难的问题, 美国国防部颁布了C4ISR(command, control, communication, computer, intelligence, surveillance, and reconnaissance)集成架构2.0版[13-14]。随着C4ISR的不断完善, 其适用性扩大至所有任务领域, 逐步发展为国防部体系架构标准DoDAF1.0版[15], 成为被广泛认可的指导军事工程项目研发的系统工程方法论。2009年5月颁布的DoDAF2.0版作为体系结构技术发展的标志, 得到世界各国的广泛认可和采用[16]。目前, 最新的DoDAF2.02版的核心从架构产品转移到架构数据[17-18], 体现了以数据为核心的体系结构建模思想[19-20]。
DoDAF2.02架构是美国国防部各部门开展业务、指导业务辅助工具建设的具体承载。DoDAF2.02版本的核心为8个视图与52个模型, 划分为全景视图、作战视图、能力视图、系统视图, 以数据为中心, 基于模型和元数据的底层实现方式[21], 为引入基于模型的系统工程(model-based systems engineering, MBSE)方法奠定了基础[22-23], 为体系结构研究在系统工程方面的探索实践提供了很好的应用基础[24]。
1.2 应用DoDAF开展体系结构建模的逻辑方法
(1) 视图裁剪
航空装备智能保障系统体系结构建模的核心关注点是智能化保障能力的生成、传递和验证。由于DoDAF架构服务于美国国防部各部门的具体业务, 除联合能力集成与开发系统(joint capabilities integration and development system, JCIDS)外, 还要支撑预算与规划、采办、作战规划等多维度业务[25-26]。在借鉴应用时, 首先需要对DoDAF2.0的8类视图进行裁剪, 选取直接支撑航空装备智能保障系统体系结构建模的全景视图、作战视图和能力视图, 具体如表 1所示。
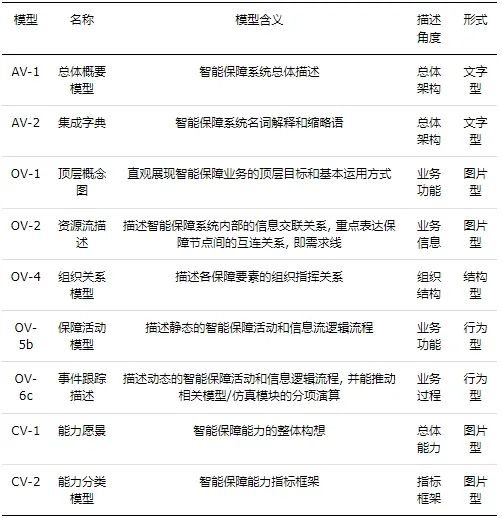
表1 航空装备智能保障系统体系结构模型
全景视图主要描述航空智能保障系统的基本概念、范围边界、研制目标、使用用户、背景描述等信息, 包括AV-1(总体概要模型、文字描述)和AV-2(综合词典、名词解释和缩略语清单)[27]。
作战视图用于描述航空装备智能保障系统活动和信息交联关系, 主要包括OV-1(顶层业务概念图, 通常为图片形式, 用于直观展现智能保障的顶层目标和基本运用方式)、OV-2(资源流图, 用于描述智能保障内、外部的信息/资源交联关系)、OV-3(资源流矩阵, 用于描述所有节点与保障活动的信息交联关系)、OV-4(组织关系模型, 用于描述各保障角色的组织指挥关系)、OV-5b(活动分解树/活动模型, 用于描述静态的保障活动和信息流逻辑流程)、OV-6c(保障规则模型/保障状态转换模型/保障事件跟踪模型, 用于描述动态的保障活动和信息逻辑流程, 并能推动相关模型/仿真模块的分项演算)等。
能力视图用于描述航空装备智能保障系统能力需求。主要包括CV-1(能力愿景, 能力的整体构想), CV-2(能力分类模型, 对应能力指标框架)。
(2) 应用逻辑
采用基于模型的系统工程方法, 分析智能化保障流程, 以分解智能保障活动为基础, 提炼智能保障系统关键能力的需求。具体应用时, 以全景视图的智能保障概念为引领, 在问题域深入分析智能保障系统的基本概念和范围边界, 以作战视图的保障活动分解为核心, 在方案域详细梳理航空装备智能保障系统的典型运行方式(OV-5、OV-6)和信息交联关系(OV-2、OV-4), 以能力视图的智能保障能力分类为抓手, 在实现域全面解析智能保障系统的设计需求(CV-1、CV-2), 按照AV-1、AV-2、OV-1、OV-2、OV-4、OV-5b、OV-6c、CV-1、CV-2的顺序进行建模。需要注意的是, CV-2与OV-5b存在一定的映射关系。航空装备智能保障系统体系结构开发序列如图 1所示。

图1 基于DoDAF的航空装备智能保障系统体系结构开发序列
2 航空装备智能保障系统体系结构模型
由于航空装备智能保障系统涉及使用保障、维修保障、训练保障等多个应用场景, 为简化起见, 本文基于最核心的维修保障场景建立航空装备智能保障系统体系结构模型。
2.1 总体概要模型
航空装备智能保障系统是以作战训练任务为牵引, 以智能化航空装备为核心, 基于陆海空天多种平台互联的实时状态感知网络, 构建航空装备保障系统云平台, 利用大数据、云计算、物联网、机器学习、数字孪生、虚拟现实、无人系统、3D打印等先进技术, 生成智能保障方案, 快速调动保障资源, 动态优化保障流程, 高效完成航空装备精确保障的一种全新保障系统。本文分析智能保障系统完成维修保障任务所需的动态行为和结构特征, 建立体系结构模型, 为智能保障系统开发提供依据。
2.2 构建集成字典
集成字典AV-2包含体系结构数据和由体系结构表述的全部术语定义的数据知识库[28]。在建立航空装备智能保障集成字典的过程中, 对智能化的保障决策、资源调度和作业实施的定义是区别于其他保障系统的关键要素。
(1) 能力。根据维修保障任务, 明确智能保障系统的关键能力, 即数据处理能力、通信能力、态势感知能力、智能决策能力、自学习能力和智能作业能力等。
(2) 人员/系统。维修保障任务主要包含部署于机务指挥中心的智能保障系统云平台与分布在机务中队、修理厂、训练中心、航材股、四站连、装设备中心等机构的智能终端节点, 这些节点负责维修保障任务的总体规划和协调、制定维修保障计划, 下达维修保障任务和指令, 接收反馈信息, 具备最高指控权限。由传感器、数据接口等构成的信息采集终端, 主要从作战任务系统、故障预测与健康管理(prognostics and health management, PHM)系统、地面测试设备、航材仓库等软硬件系统中收集作战训练任务、装备与保障资源态势数据, 并将其传递给智能保障系统云平台。具有智能化维修保障作业功能的保障设备/设施, 可根据智能保障决策“云”发出的作业指令, 自主完成一站式机库维修作业、航材库存管理、一体化训练等保障作业, 并将作业信息通过智能终端上传给智能保障系统云平台。
(3) 活动。维修保障活动主要包括: 维修作业、航材供应和维修训练等。
(4) 资源流。对活动之间数据、物资、人员流动或交换的表述,包括维修保障计划指令、维修保障作业指令、态势信息共享、作业信息反馈等。
(5) 规则。对智能维修保障的活动约束, 包括装备完好率、维修时限、保障资源数量等。
(6) 度量。度量数据主要包括装备性能、智能保障云平台性能、保障装设备性能、保障费用、通信链路性能等。
(7) 信息。对智能保障活动相关和所需事物的表述, 包括航空装备数量信息、机务人员信息、保障设施信息等。
2.3 顶层业务概念图
顶层业务概念图OV-1以图像和文字的形式直观描绘系统概念, 展现系统的目标、架构以及与相关系统的交联关系[29], 其组成包括人员/系统和资源流。航空装备智能保障系统是机上与机下一体化、当前与未来预测精确化、中心与各要素协同化、辅助决策与作业智能化、训练综合化的保障系统, 主要由智能保障决策“云”、保障态势感知“端”和智能保障作业“边”组成。根据AV-1和AV-2的综合描述, 绘制顶层业务概念图如图 2所示。
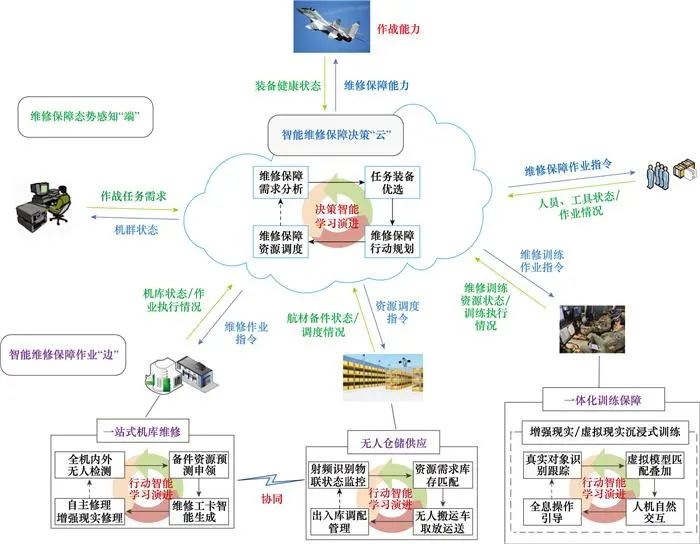
图2 顶层业务概念图OV-1
智能保障决策“云”由部署于机务指挥中心的智能保障系统云平台, 以及分布在机务中队、修理厂、训练中心、航材股、四站连等机构的智能终端节点组成。保障态势感知“端”是由传感器、数据接口等构成的信息采集终端, 主要从作战任务系统、PHM系统、地面测试设备、航材仓库等软硬件系统中收集作战训练任务、保障态势数据, 将其传递给智能保障决策“云”。智能保障作业“边”是具有智能化保障作业功能的保障设备/设施, 可根据智能保障决策“云”发出的作业指令, 自主完成航材库存管理、一站式机库维修作业、一体化训练等维修保障作业, 在作业过程中可与相关智能保障作业“边”进行协同, 并可通过作业历史数据不断学习演进作业智能算法, 不断提高作业效率。
2.4 组织关系图
组织结构图OV-4是对保障节点、机构和人员之间指控关系的描述, 如图 3所示, 基于集成字典AV-2, 智能维修保障组织节点包括作战训练部门、飞机平台、机务指挥中心、机务中队、修理厂、训练中心、航材股、装设备中心和四站连。
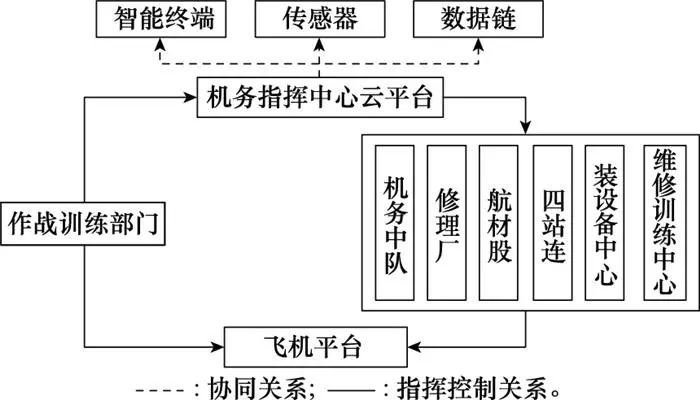
图3 组织关系图OV-4
2.5 资源流图
资源流图OV-2主要对保障节点连接进行描述, 包括保障节点、节点上执行的活动、节点和节点的关系和信息交换。本文资源流图OV-2如图 4所示, 图 4主要描述了航空装备智能维修保障系统的数据流、物资流和人员的维修保障模式。
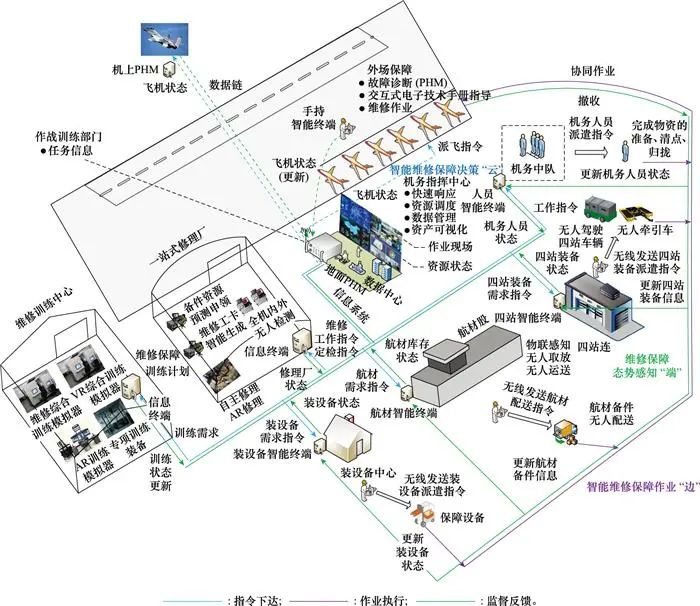
图4 资源流图OV-2
从图 4可以看出, 在智能保障模式下, 机务指挥中心(智能保障决策“云”)根据传感器、数据接口等构成的信息采集终端(保障态势感知“端”)感知的作战训练任务需求、装备与保障资源状态和监控数据, 应用机器学习等智能分析技术, 通过设计的算法实现状态监控和预测, 辅助决策生成战时和平时维修保障方案, 动态调度维修保障资源。同时, 通过作业指令驱动具有智能化保障作业功能的保障设备/设施(智能保障作业“边”)执行维修保障作业, 并调用维修训练系统进行一体化训练。作业完成后, 保障态势感知“端”和智能保障作业“边”将飞机状态信息以及维修保障资源的使用情况实时反馈给智能保障决策“云”, 辅助其智能决策算法的学习演进, 不断提高保障决策的精准性、敏捷性, 从而提高装备系统效率, 降低保障成本。
航空装备智能保障系统还将为飞行员、保障人员、航空装备和系统之间提供交互信道。智能保障系统可以根据不同的作战任务需求设计相应的保障方案, 并可通过智能保障系统中的数字模拟器来实现仿真和验证, 经过迭代仿真, 最终的最优保障方案可以由保障人员或机器人来执行和实现。航空装备智能保障的最终目标和未来发展趋势是基于优化控制的在线状态监控和智能维护。智能保障系统为航空装备智能保障提供了可能性, 并且为航空装备提供了更有效、高效的状态监控和保障方案。
2.6 保障活动模型
保障活动模型用于表达智能维修保障活动的典型任务流程, 即描述具体的活动逻辑关系及其相互之间的关系, 包括维修的各项活动的执行主体、活动间的资源传递等信息[30]。航空装备智能维修保障活动模型如图 5所示。
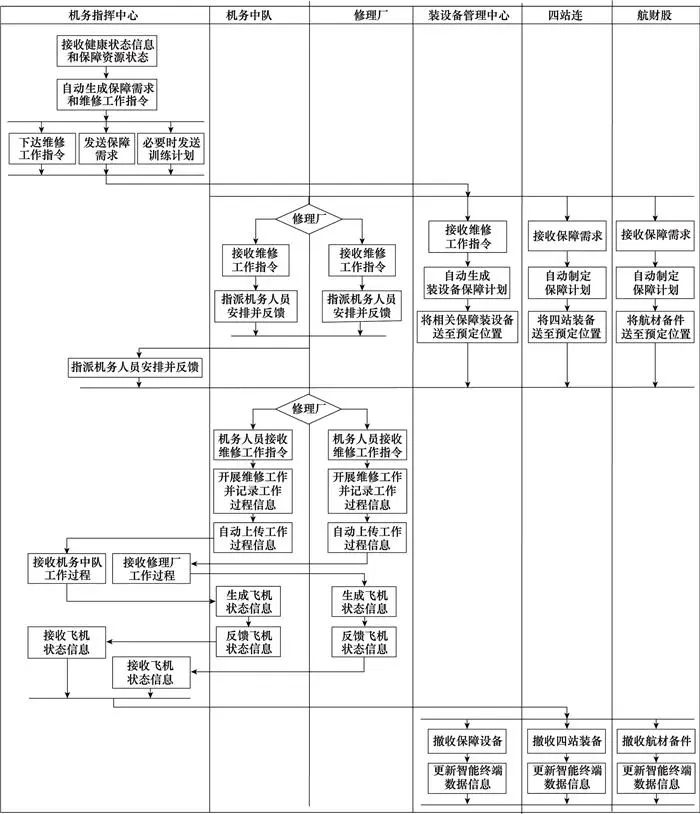
图5 保障活动模型OV-5b
2.7 事件跟踪描述
航空装备智能保障系统的核心工作是确保维修保障任务顺利完成, 而业务事件追踪描述提供了资源流的一种时序检验, 作为特定场景想定的一个结果, 能够有效地被用于分析维修保障活动, 确保整个维修保障工作完整有效。航空装备智能维修保障事件跟踪描述如图 6所示。
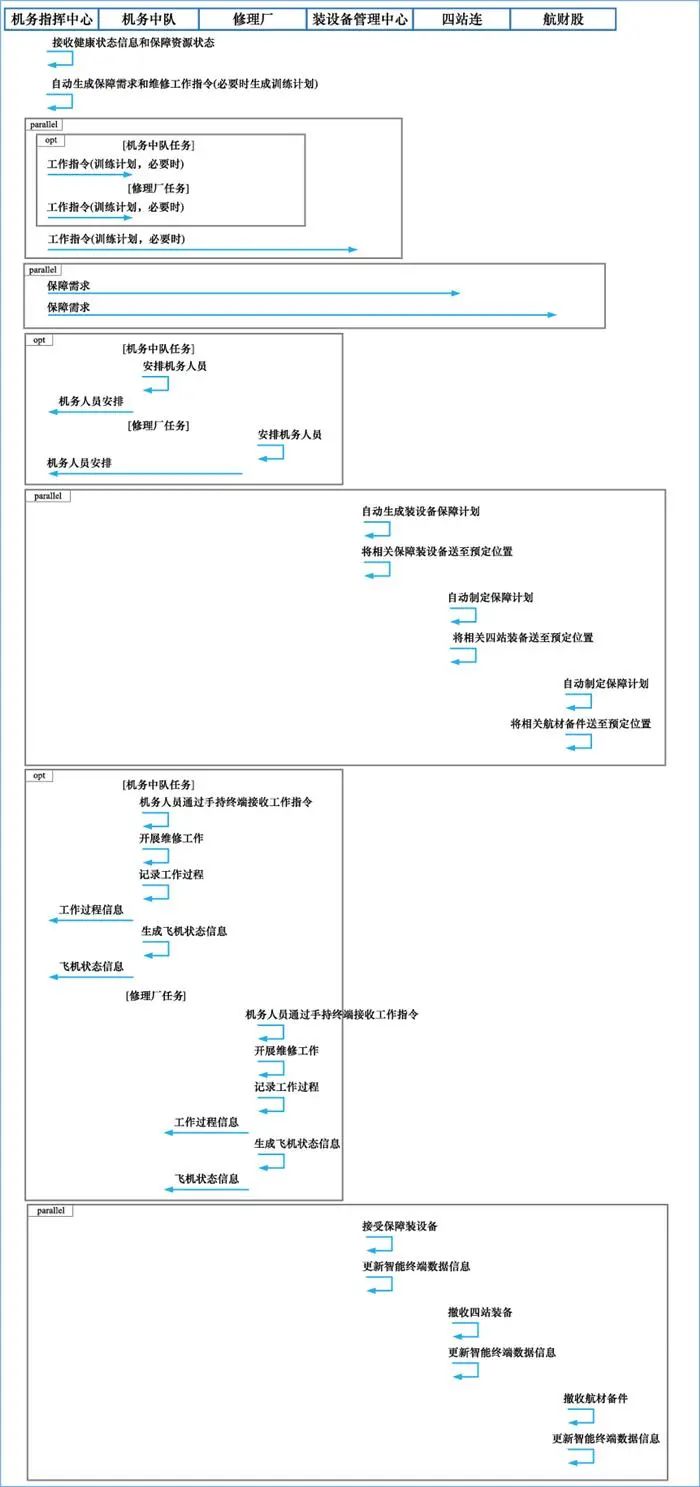
图6 事件跟踪描述OV-6c
2.8 能力愿景
能力愿景是用于描述能力的高层背景, 支持采用易于被非技术人员理解的语言描述关于能力方面的整体构想, 旨在为所描述的能力提供一种战略背景和高层范围。航空装备智能维修保障能力愿景可以分为能力、能力的活动、执行者的能力三部分。对应到智能维修保障工作, 机务指挥中心通过智能保障系统云平台向分布在机务中队、修理厂、航材股、四站连、装设备中心等机构的智能终端节点下达维修工作指令, 机务中队/修理厂通过智能终端节点接收维修工作指令自动生成维修保障方案, 指派各个专业的机务人员和修理人员运用具有智能化保障作业功能的保障设备/设施自主完成一站式机库维修作业、航材库存管理、一体化维修训练等作业, 并把所有感知信息和工作情况通过智能终端传递给智能保障系统云平台。
航空装备智能维修保障能力愿景模型如图 7所示。
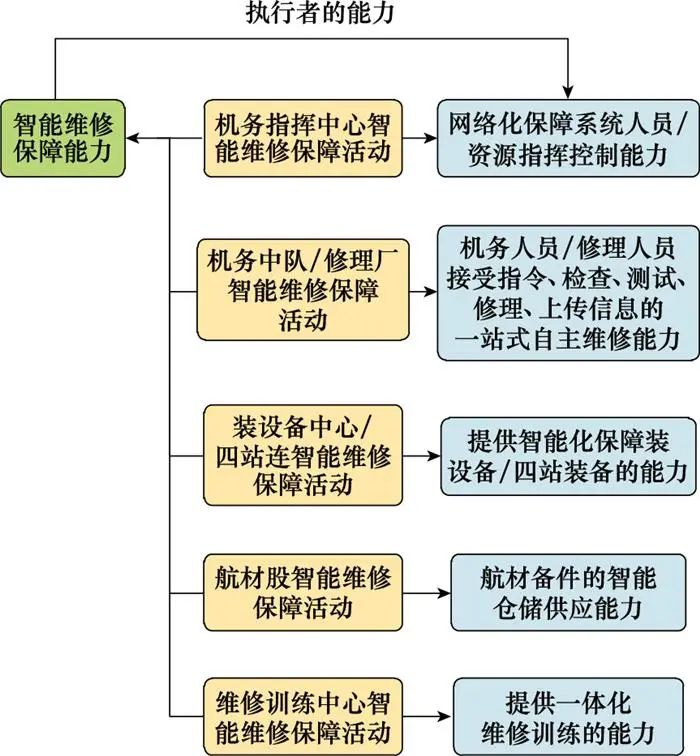
图7 能力愿景CV-1
2.9 能力分类模型
依据航空装备智能维修保障能力愿景CV-1以及智能维修保障活动模型OV-5b、智能维修保障事件追踪描述OV-6c, 将智能维修保障能力拆分为各项子能力, 得到“能力层-需求层-技术层”之间的交联关系。智能维修保障能力分类模型如图 8所示, 其中能力层1对应CV-1模型, 能力层2对应OV-5b模型和OV-6c模型。智能维修保障给相关技术提出了挑战, 但同时揭示了未来的发展趋势, 未来发展趋势可以归纳为如下内容: 从特定传感到综合传感; 从小范围通信到广域通信; 从封闭的大数据基础架构到通过云平台共享的大数据服务; 从固定数据分析到能够使用高级机器学习算法进行监控和预测的交互式数字仿真系统; 从手动设备维修到智能和自动维修。
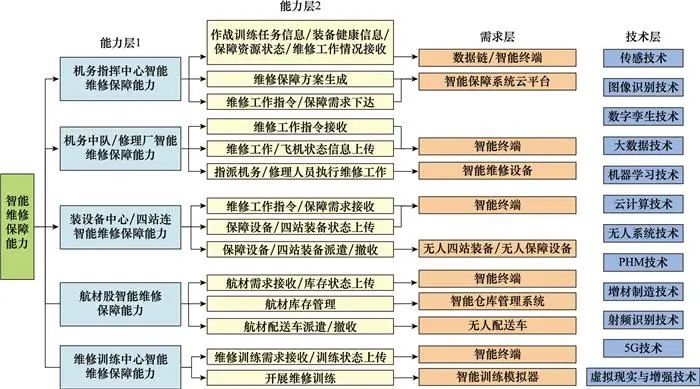
图8 能力分类模型CV-2
3 结论
(1) 根据航空装备智能保障系统开发需求对DoDAF视图进行定制化裁剪, 提出了基于“概念-任务-能力”的体系结构开发序列, 该方法能够全面描述航空装备智能保障系统体系结构, 提高各类保障部门和保障资源的互操作性, 实现保障的先导化、敏捷化和智能化。
(2) 从多个视角对智能保障系统功能、保障活动、保障要素的信息交互及组织关系进行建模, 得到“能力层-需求层-技术层”之间的交联关系, 使模型信息更加立体, 提高了模型的完整性与可理解性, 使得研究人员能够更加清晰准确地对智能保障系统进行分析设计。
(3) 提出并分析了智能保障系统在航空装备保障中的应用。在航空装备上安装各种传感器, 可以获得对装备运行状态的全面描述。通过集成了先进的数据处理和预测算法的云平台能够提供最优的保障方案, 该方案可以根据作战任务需求进行调整。智能保障系统可以实现航空装备高效和有效的保障, 为未来高强度持续作战条件下的高可靠性智能航空装备提供了创新见解。
声明:公众号转载的文章及图片出于非商业性的教育和科研目的供大家参考和探讨,并不意味着支持其观点或证实其内容的真实性。版权归原作者所有,如转载稿涉及版权等问题,请立即联系我们删除。
“人工智能技术与咨询” 发布














 525
525











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









