







二叉搜索树
二叉搜索树:
1.所有非叶子结点至多拥有两个儿子(Left和Right);
2.所有结点存储一个关键字;
3.非叶子结点的左指针指向小于其关键字的子树,右指针指向大于其关键字的子树;
如:
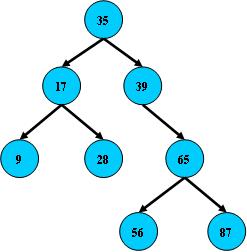
B树的搜索,从根结点开始,如果查询的关键字与结点的关键字相等,那么就命中;
否则,如果查询关键字比结点关键字小,就进入左儿子;如果比结点关键字大,就进入
右儿子;如果左儿子或右儿子的指针为空,则报告找不到相应的关键字;
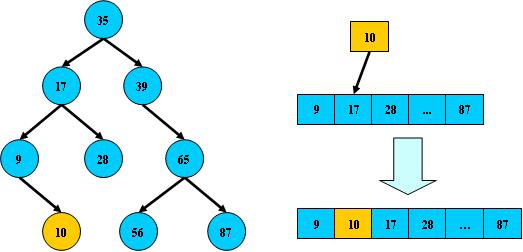
如果B树的所有非叶子结点的左右子树的结点数目均保持差不多(平衡),那么B树
的搜索性能逼近二分查找;但它比连续内存空间的二分查找的优点是,改变B树结构
(插入与删除结点)不需要移动大段的内存数据,甚至通常是常数开销;
如:
但B树在经过多次插入与删除后,有可能导致不同的结构:
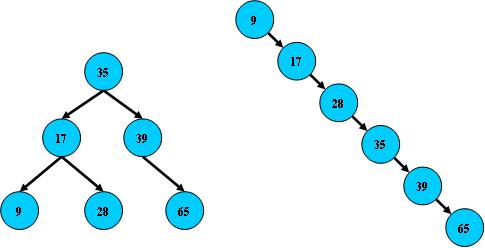
右边也是一个B树,但它的搜索性能已经是线性的了;同样的关键字集合有可能导致不同的
树结构索引;所以,使用B树还要考虑尽可能让B树保持左图的结构,和避免右图的结构,也就
是所谓的“平衡”问题;
实际使用的B树都是在原B树的基础上加上平衡算法,即“平衡二叉树”;如何保持B树
结点分布均匀的平衡算法是平衡二叉树的关键;平衡算法是一种在B树中插入和删除结点的
策略;
B-树
是一种多路搜索树(并不是二叉的):
1.定义任意非叶子结点最多只有M个儿子;且M>2;
2.根结点的儿子数为[2, M];
3.除根结点以外的非叶子结点的儿子数为[M/2, M];
4.每个结点存放至少M/2-1(取上整)和至多M-1个关键字;(至少2个关键字)
5.非叶子结点的关键字个数=指向儿子的指针个数-1;
6.非叶子结点的关键字:K[1], K[2], …, K[M-1];且K[i] < K[i+1];
7.非叶子结点的指针:P[1], P[2], …, P[M];其中P[1]指向关键字小于K[1]的
子树,P[M]指向关键字大于K[M-1]的子树,其它P[i]指向关键字属于(K[i-1], K[i])的子树;
8.所有叶子结点位于同一层;
如:(M=3)
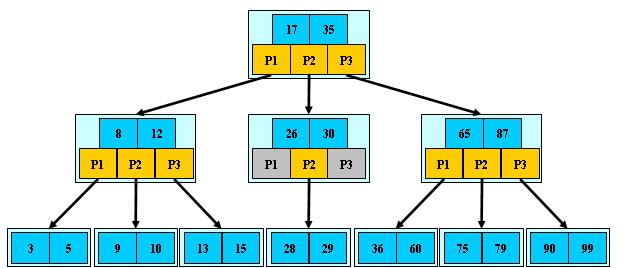
B-树的搜索,从根结点开始,对结点内的关键字(有序)序列进行二分查找,如果
命中则结束,否则进入查询关键字所属范围的儿子结点;重复,直到所对应的儿子指针为
空,或已经是叶子结点;
B-树的特性:
1.关键字集合分布在整颗树中;
2.任何一个关键字出现且只出现在一个结点中;
3.搜索有可能在非叶子结点结束;
4.其搜索性能等价于在关键字全集内做一次二分查找;
5.自动层次控制;
由于限制了除根结点以外的非叶子结点,至少含有M/2个儿子,确保了结点的至少
利用率,其最底搜索性能为:
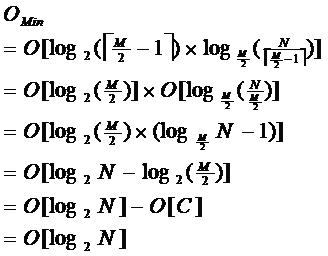
其中,M为设定的非叶子结点最多子树个数,N为关键字总数;
所以B-树的性能总是等价于二分查找(与M值无关),也就没有B树平衡的问题;
由于M/2的限制,在插入结点时,如果结点已满,需要将结点分裂为两个各占
M/2的结点;删除结点时,需将两个不足M/2的兄弟结点合并;
B树的操作:
1、B-树的查找
B-树的查找过程:根据给定值查找结点和在结点的关键字中进行查找交叉进行。首先从根结点开始重复如下过程:
若比结点的第一个关键字小,则查找在该结点第一个指针指向的结点进行;若等于结点中某个关键字,则查找成功;若在两个关键字之间,则查找在它们之间的指针指向的结点进行;若比该结点所有关键字大,则查找在该结点最后一个指针指向的结点进行;若查找已经到达某个叶结点,则说明给定值对应的数据记录不存在,查找失败。
2. B-树的插入
插入的过程分两步完成:
(1)利用前述的B-树的查找算法查找关键字的插入位置。若找到,则说明该关键字已经存在,直接返回。否则查找操作必失败于某个最低层的非终端结点上。
(2)判断该结点是否还有空位置。即判断该结点的关键字总数是否满足n<m-1。若满足,则说明该结点还有空位置,直接把关键字k插入到该结点的合适位置上。若不满足,说明该结点己没有空位置,需要把结点分裂成两个。
分裂的方法是:生成一新结点。把原结点上的关键字和k按升序排序后,从中间位置把关键字(不包括中间位置的关键字)分成两部分。左部分所含关键字放在旧结点中,右部分所含关键字放在新结点中,中间位置的关键字连同新结点的存储位置插入到父结点中。如果父结点的关键字个数也超过(m-1),则要再分裂,再往上插。直至这个过程传到根结点为止。




3、B-树的删除
在B-树上删除关键字k的过程分两步完成:
(1)利用前述的B-树的查找算法找出该关键字所在的结点。然后根据 k所在结点是否为叶子结点有不同的处理方法。
(2)若该结点为非叶结点,且被删关键字为该结点中第i个关键字key[i],则可从指针son[i]所指的子树中找出最小关键字Y,代替key[i]的位置,然后在叶结点中删去Y。
因此,把在非叶结点删除关键字k的问题就变成了删除叶子结点中的关键字的问题了。
在B-树叶结点上删除一个关键字的方法是
首先将要删除的关键字 k直接从该叶子结点中删除。然后根据不同情况分别作相应的处理,共有三种可能情况:
(1)如果被删关键字所在结点的原关键字个数n>=ceil(m/2),说明删去该关键字后该结点仍满足B-树的定义。这种情况最为简单,只需从该结点中直接删去关键字即可。
(2)如果被删关键字所在结点的关键字个数n等于ceil(m/2)-1,说明删去该关键字后该结点将不满足B-树的定义,需要调整。
调整过程为:如果其左右兄弟结点中有“多余”的关键字,即与该结点相邻的右(左)兄弟结点中的关键字数目大于ceil(m/2)-1。则可将右(左)兄弟结点中最小(大)关键字上移至双亲结点。而将双亲结点中小(大)于该上移关键字的关键字下移至被删关键字所在结点中。
(3)如果左右兄弟结点中没有“多余”的关键字,即与该结点相邻的右(左)兄弟结点中的关键字数目均等于ceil(m/2)-1。这种情况比较复杂。需把要删除关键字的结点与其左(或右)兄弟结点以及双亲结点中分割二者的关键字合并成一个结点,即在删除关键字后,该结点中剩余的关键字加指针,加上双亲结点中的关键字Ki一起,合并到Ai(是双亲结点指向该删除关键字结点的左(右)兄弟结点的指针)所指的兄弟结点中去。如果因此使双亲结点中关键字个数小于ceil(m/2)-1,则对此双亲结点做同样处理。以致于可能直到对根结点做这样的处理而使整个树减少一层。
总之,设所删关键字为非终端结点中的Ki,则可以指针Ai所指子树中的最小关键字Y代替Ki,然后在相应结点中删除Y。对任意关键字的删除都可以转化为对最下层关键字的删除。

如图示:
a、被删关键字Ki所在结点的关键字数目不小于ceil(m/2),则只需从结点中删除Ki和相应指针Ai,树的其它部分不变。

b、被删关键字Ki所在结点的关键字数目等于ceil(m/2)-1,则需调整。调整过程如上面所述。

c、被删关键字Ki所在结点和其相邻兄弟结点中的的关键字数目均等于ceil(m/2)-1,假设该结点有右兄弟,且其右兄弟结点地址由其双亲结点指针Ai所指。则在删除关键字之后,它所在结点的剩余关键字和指针,加上双亲结点中的关键字Ki一起,合并到Ai所指兄弟结点中(若无右兄弟,则合并到左兄弟结点中)。如果因此使双亲结点中的关键字数目少于ceil(m/2)-1,则依次类推。


B+树
B+树是B-树的变体,也是一种多路搜索树:
1.其定义基本与B-树同,除了:
2.非叶子结点的子树指针与关键字个数相同;
3.非叶子结点的子树指针P[i],指向关键字值属于[K[i], K[i+1])的子树
(B-树是开区间);
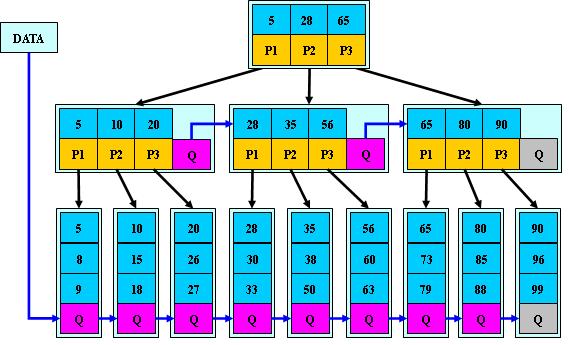
5.为所有叶子结点增加一个链指针;
6.所有关键字都在叶子结点出现;
如:(M=3)
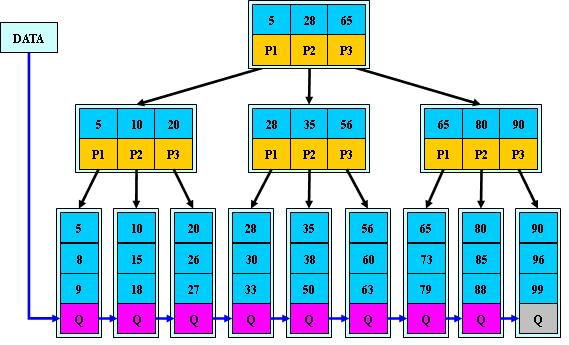
B+的搜索与B-树也基本相同,区别是B+树只有达到叶子结点才命中(B-树可以在
非叶子结点命中),其性能也等价于在关键字全集做一次二分查找;
B+的特性:
1.所有关键字都出现在叶子结点的链表中(稠密索引),且链表中的关键字恰好
是有序的;
2.不可能在非叶子结点命中;
3.非叶子结点相当于是叶子结点的索引(稀疏索引),叶子结点相当于是存储
(关键字)数据的数据层;
4.更适合文件索引系统;
B+树的操作:
查找
查找以典型的方式进行,类似于二叉查找树。起始于根节点,自顶向下遍历树,选择其分离值在要查找值的任意一边的子指针。在节点内部典型的使用是二分查找来确定这个位置。
插入
节点要处于违规状态,它必须包含在可接受范围之外数目的元素。
- 首先,查找要插入其中的节点的位置。接着把值插入这个节点中。
- 如果没有节点处于违规状态则处理结束。
- 如果某个节点有过多元素,则把它分裂为两个节点,每个都有最小数目的元素。在树上递归向上继续这个处理直到到达根节点,如果根节点被分裂,则创建一个新根节点。为了使它工作,元素的最小和最大数目典型的必须选择为使最小数不小于最大数的一半。
删除
- 首先,查找要删除的值。接着从包含它的节点中删除这个值。
- 如果没有节点处于违规状态则处理结束。
- 如果节点处于违规状态则有两种可能情况:
- 它的兄弟节点,就是同一个父节点的子节点,可以把一个或多个它的子节点转移到当前节点,而把它返回为合法状态。如果是这样,在更改父节点和两个兄弟节点的分离值之后处理结束。
- 它的兄弟节点由于处在低边界上而没有额外的子节点。在这种情况下把两个兄弟节点合并到一个单一的节点中,而且我们递归到父节点上,因为它被删除了一个子节点。持续这个处理直到当前节点是合法状态或者到达根节点,在其上根节点的子节点被合并而且合并后的节点成为新的根节点。
l 例1:
往下图的3阶B+树中插入关键字9

首先查找9应插入的叶节点(最左下角的那一个),插入发现没有破坏B+树的性质,完毕。插完如下图所示:

l 例2:
往下图的3阶B+树插入20
首先查找20应插入的叶节点(第二个叶子节点),插入,如下图

发现第二个叶子节点已经破坏了B+树的性质,则把之分解成[20 21], [37 44]两个,并把21往父节点移,如下图

发现父节点也破坏了B+树的性质,则把之再分解成[15 21], [44 59]两个,并把21往其父节点移,如下图

这次没有破坏B+树的性质(如果还是不满足B+树的性质,可以递归上去,直到满足为至),插入完毕。
l 例3:
往下图的3阶B+树插入100
首先查找100应插入的叶节点(最后一个节点), 插入,如下图

修改其所有父辈节点的键值为100(只有插入比当前树的最大数大的数时要做此步),如下图

然后重复Eg.2的方法拆分节点,最后得

三, 3阶B+树的删除举例:
l 例1:
删除下图3阶B+树的关键字91
首先找到91所在叶节点(最后一个节点),删除之,如下图

没有破坏B+树的性质,删除完毕
l 例2:
删除下图3阶B+树的关键字97
首先找到97所在叶节点(最后一个节点),删除之,然后修改该节点的父辈的键字为91(只有删除树中最大数时要做此步),如下图

l 例3:
删除下图3阶B+树的关键字51
首先找到51所在节点(第三个节点),删除之,如下图

破坏了B+树的性质,从该节点的兄弟节点(左边或右边)借节点44,并修改相应键值,判断没有破坏B+树,完毕,如下图

l 例4:
删除下图3阶B+树的关键字59

首先找到59所在叶节点(第三个节点),删除之,如下图

破坏B+树性质,尝试借节点,无效(因为左兄弟节点被借也会破坏B+树性质),合并第二第三叶节点并调整键值,如下图

完毕。
l 例5:
删除下图3阶B+树的关键字63

首先找到63所在叶节点(第四个节点),删除之,如下图

合并第四五叶节点并调整键值,如下图

发现第二层的第二个节点不满足B+树性质,从第二层的第一个节点借59,并调整键值,如下图

B*树
是B+树的变体,在B+树的非根和非叶子结点再增加指向兄弟的指针;
B*树定义了非叶子结点关键字个数至少为(2/3)*M,即块的最低使用率为2/3
(代替B+树的1/2);
B+树的分裂:当一个结点满时,分配一个新的结点,并将原结点中1/2的数据
复制到新结点,最后在父结点中增加新结点的指针;B+树的分裂只影响原结点和父
结点,而不会影响兄弟结点,所以它不需要指向兄弟的指针;
B*树的分裂:当一个结点满时,如果它的下一个兄弟结点未满,那么将一部分
数据移到兄弟结点中,再在原结点插入关键字,最后修改父结点中兄弟结点的关键字
(因为兄弟结点的关键字范围改变了);如果兄弟也满了,则在原结点与兄弟结点之
间增加新结点,并各复制1/3的数据到新结点,最后在父结点增加新结点的指针;
所以,B*树分配新结点的概率比B+树要低,空间使用率更高;
Mysql等数据库中采用B+树而不是B树的原因:
这就决定了B+树更适合用来存储外部数据,也就是所谓的磁盘数据。
2、从Mysql(Inoodb)的角度来看,B+树是用来充当索引的,一般来说索引非常大,尤其是关系性数据库这种数据量大的索引能达到亿级别,所以为了减少内存的占用,索引也会被存储在磁盘上。
5、B+树所有的Data域在叶子节点,一般来说都会进行一个优化,就是将所有的叶子节点用指针串起来。这样遍历叶子节点就能获得全部数据,这样就能进行区间访问啦。
小结
B树:二叉树,每个结点只存储一个关键字,等于则命中,小于走左结点,大于
走右结点;
B-树:多路搜索树,每个结点存储M/2-1到M-1个关键字,非叶子结点存储指向关键
字范围的子结点;
所有关键字在整颗树中出现,且只出现一次,非叶子结点可以命中;
B+树:在B-树基础上,为叶子结点增加链表指针,所有关键字都在叶子结点
中出现,非叶子结点作为叶子结点的索引;B+树总是到叶子结点才命中;
B*树:在B+树基础上,为非叶子结点也增加链表指针,将结点的最低利用率
从1/2提高到2/3;















 2455
2455

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









