




 文章详细介绍了赤道仪的自动寻星功能,包括赤道仪零位、赤纬半圆位置的定义,以及如何通过当地恒星时计算中天赤经坐标。接着,阐述了自动寻星的限制,如仰角过高的天体和地平线以下的天体。文章还探讨了赤经角坐标与赤经时间坐标转换的方法,并提出了一套自动寻星算法,包括天体位置的图像表示、角度计算和异常情况处理。最后,提到了通过误差曲线拟合和三星校准、多星校准来提高自动寻星的精度。
文章详细介绍了赤道仪的自动寻星功能,包括赤道仪零位、赤纬半圆位置的定义,以及如何通过当地恒星时计算中天赤经坐标。接着,阐述了自动寻星的限制,如仰角过高的天体和地平线以下的天体。文章还探讨了赤经角坐标与赤经时间坐标转换的方法,并提出了一套自动寻星算法,包括天体位置的图像表示、角度计算和异常情况处理。最后,提到了通过误差曲线拟合和三星校准、多星校准来提高自动寻星的精度。
自动寻星功能可以使赤道仪自动从一个天体指向另一个天体,而代替了人工查找坐标、旋转赤道仪的工作。在配置好赤道仪所用天体坐标星表后,通过一定的方法,可以使得赤道仪具有自动寻星功能。
Ⅰ 定义的一些名词
1.1 赤道仪零位
赤道仪零位指的是使得天文望远镜方便放置时的赤道仪姿态。在此文中的赤道仪零位为:赤道仪对准极轴后,在赤道仪上安放好天文望远镜或其他观测设备时,使得该观测设备指向北天极、赤道仪赤纬转轴竖直指向中天的赤道仪姿态。
1.2 赤纬半圆位置
在赤道坐标系中,天体的赤经坐标范围为:0 ~ 24h、赤纬坐标范围为-90 ~ 90°,天体的赤纬坐标分布在一个180°的半圆上,理论上只要赤经能够转动360°、赤纬能够转动180°,赤道仪即可实现自动寻星功能。而如果只使用左侧或者右侧的180°半圆进行自动寻星,会导致以下几种主要问题:1.观测设备会碰撞赤道仪三脚架,赤道仪应避免通过天顶;2.观测设备有可能处于赤道仪下方。因此在某些情况下需要分别使用赤纬轴的左右两个半圆进行自动寻星。当赤道仪在零位时,规定赤道仪使用赤纬轴右侧的半圆作为赤纬运动范围。在下述的自动寻星算法中,赤道仪赤纬右半圆负责指向中天东侧的天体;赤道仪赤纬左半圆负责指向中天西侧的天体。
Ⅱ 赤道仪自动寻星方法
2.1 当地恒星时与中天赤经坐标
当赤道仪自动寻星,在零位的赤道仪需要知道此刻观测设备指向的赤经、赤纬坐标。由1.1的定义,此时的赤纬坐标应为90°,而此时赤道仪使用赤纬轴的右侧半圆范围作为赤纬范围进行自动寻星,赤经坐标为该地该时刻中天位置的赤经坐标加上6h(如果该坐标不在0~24h内,则需转换到0~24h)。利用天文学知识推导,中天位置的赤经在数值上等于此时的当地恒星时,可以由下式计算:
其中:
| 符号 | 意义 | 计算方法 | 单位 |
| | 当地经度 | 查阅地图 | h、min、sec |
| | 此刻的北京时间 | 查阅时间 | h、min、sec |
| | 中天位置的赤经坐标 | 如上 | h、min、sec |
| m | 当地平时 | h、min、sec | |
| | 当日世界时0h的恒星时 | 如上 | h、min、sec |
| M | m对应的格林尼治平时 | h、min、sec | |
| | 常数 | 1/365.2422 | 1 |
| JD | 当日的儒略日 | 略 | day |
| T | 中间算符 | (JD-2451545)/36525 | 1 |
| | 常数 | 6 h 41 m 50.54841 s | h、min、sec |
| | 常数 | 8640184.812866s | h、min、sec |
| | 常数 | 0.093104s | h、min、sec |
| | 常数 | -0.0000062s | h、min、sec |
为了便于算法编写,实际使用时需将赤经坐标(h、min、sec)转换为角度(°),以上描述的计算过程已经被封装为了C++类,可以在我的天文学计算专栏中找到。
2.2 可寻星范围
在自动寻星时,赤道仪存在不可以寻星位置,这些位置包括:1.仰角过高接近中天的天体,观测这些天体时会导致观测设备碰撞赤道仪三脚架;2.没有在地平线以上的天体,赤道仪观测这些天体是没有意义的。
1 仰角过高的天体
这些天体的赤经坐标靠近中天,可以利用中天坐标求解,这里人为规定这些天体到中天的赤经角距离为:
| 符号 | 意义 | 单位 |
| 仰角过高的天体到中天的最大角距离 | ° |
当某天体的赤经坐标在区域:
中时,赤道仪不到达该目标,并提示操作者重新选取天体。需要说明的是,这里的范围为角度范围,而不是真实的赤经坐标范围,需要进行一定的转换。
2 没有在地平线以上的天体
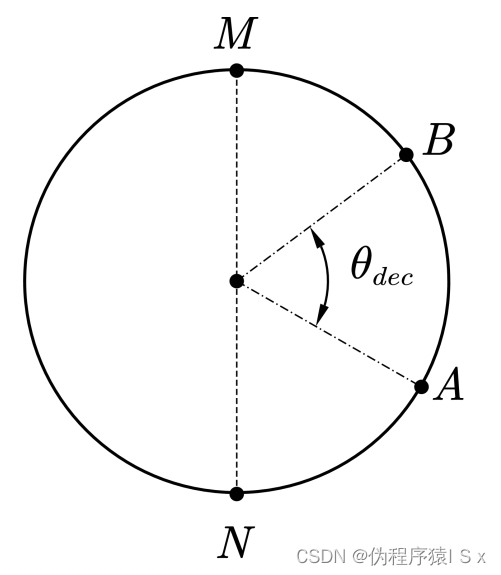
这些天体的赤经、赤纬坐标满足一定规律,为了分析这一规律,这里使用当地子午圈的大圆将天球和地面切开,得到其剖面图,如图1(左)所示。
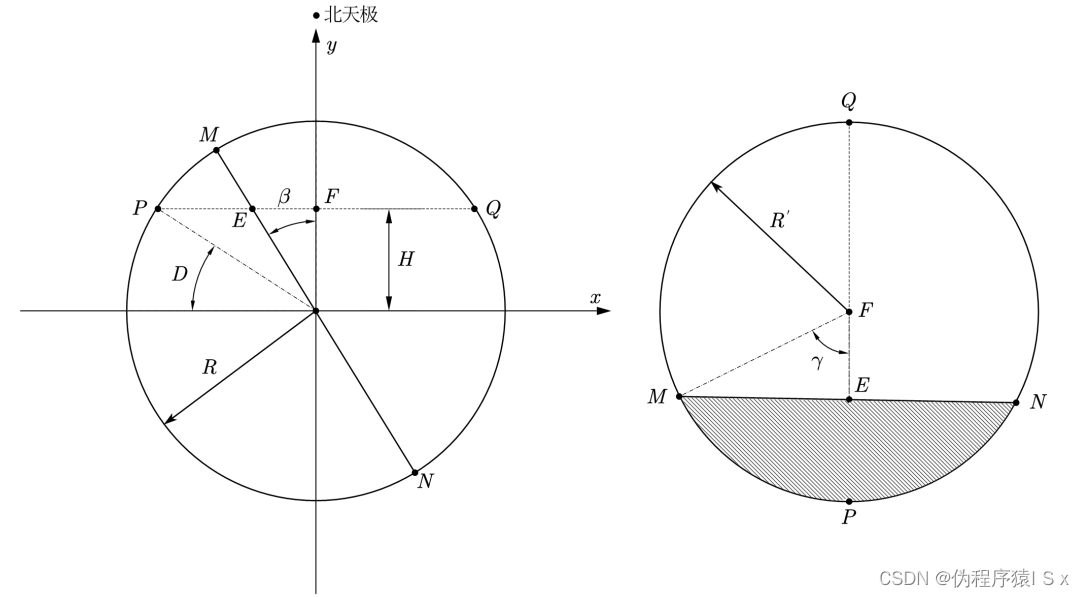 图1 几何关系
图1 几何关系
在图1中,MN代表地平面,y轴为地球极轴,PQ代表某一赤纬坐标D下的天球圆,将天球沿PQ剖开,得到了图1(右)的剖面图,此时地平面MN切割圆PMQN,则阴影部分对应的弧段上的天体在地平线之下,图中的Q点即为中天。于是求得图中的γ角即可得知地平线上的天体满足的条件。图中各符号的含义如下:
| 符号 | 意义 | 单位 |
| D | 天体的赤纬 | rad |
| 观测地的纬度 | rad | |
| 地平线以下天体分布的角位置 | rad | |
| R | 天球半径 | m |
于是图中存在几何关系:
立即可以得到:
进而:
于是对于任意赤纬,在地平线之上的天体所分布的赤经角度大小可以表示为如下的函数:
对应的可寻星赤经角度范围为:
即在该区域内的天体都在地平线之上。当目标天体不在这些范围内时,赤道仪不到达该目标,并且提醒操作者更换目标。需要说明的是,这里的范围为角度范围,而不是真实的赤经坐标范围,需要进行一定的转换。
2.3 赤经角坐标与赤经时间坐标转换
为了便于算法的编写与实现,将标准赤经坐标(单位为:h、min、s,用RA表示)转换为角度大小(单位为:°,用R表示),其转换方法为:
在某些时刻,需要计算的赤经距离不在0~360°之间,由于赤经坐标的周期性,可以通过加减360°的整数倍(n×360°,n = ±1,±2,......)将赤经坐标转化在0~360°之间。这里将其表示为函数:
为了便于后续讨论,继续引入函数:
表示两天体之间最短赤经角距离。
2.4 自动寻星算法实现
由于赤经坐标不是连续的,因此必有赤经轴坐标零点(RA = 24h或RA = 0h)存在,且零点的位置由中天赤经坐标决定,零点分布在不同位置时,赤道仪从一个天体到目标天体的角度计算方法亦不同,有些情况下不能直接将两个天体的赤经坐标(赤纬坐标)相减得到赤道仪赤经轴(赤纬轴)的运行角度,因此需要讨论零点的存在位置。这里需要说明的是,以下的讨论均不考虑2.2的两个情况,即默认赤道仪可以到达所有位置。
2.4.1 天体位置的图像表示与自动寻星系统总体目标
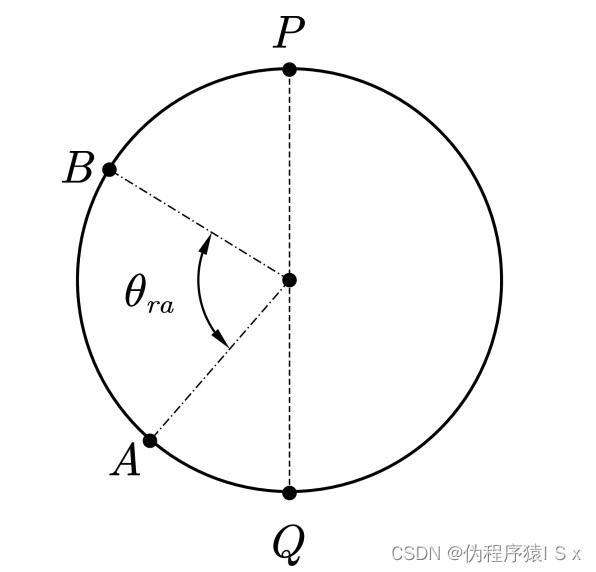
1 赤经位置的图像表示
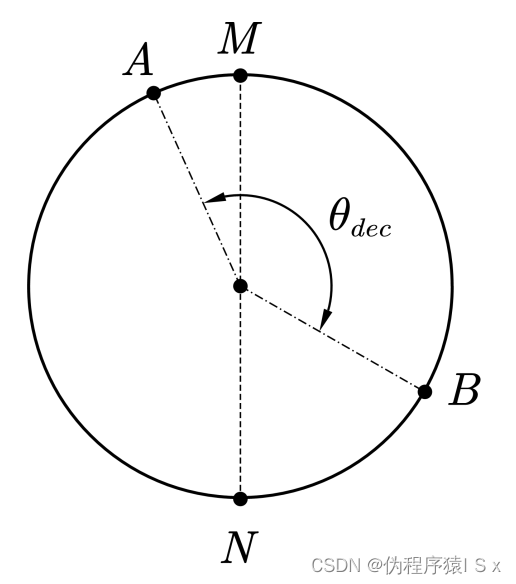
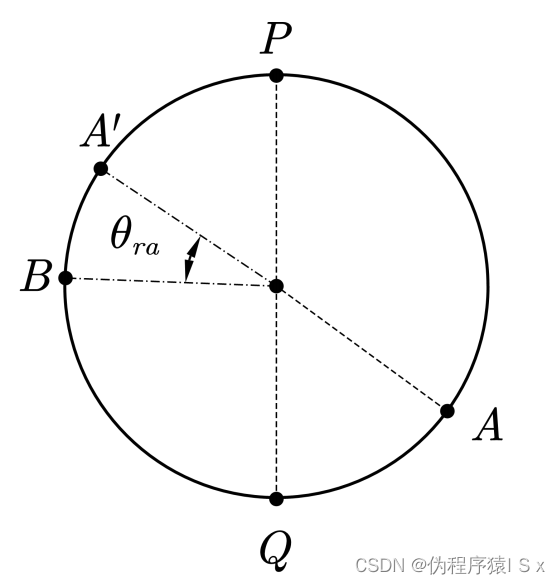
自动寻星主要考虑的是赤道仪赤经轴的转动,为了便于求解,将天体赤经绘制在一个整圆上,并在其中绘制出赤道仪此时的位置以及赤道仪即将到达的目标位置,如图2所示。图中各点的意义为:
| 点 | 意义 |
| A | 赤道仪当前指向的天体的赤经位置 |
| B | 赤道仪目标点的天体的赤经位置 |
| G | 正西方向 |
| H | 正东方向 |
| P | 与天顶相对的点 |
| Q | 天顶或中天、当地子午圈,此点的赤经坐标为Rz |
| 赤经坐标零点 |
该图可以理解为从北天极往赤道仪所在赤纬的小圆观察,赤道仪赤经轴的转动区域。
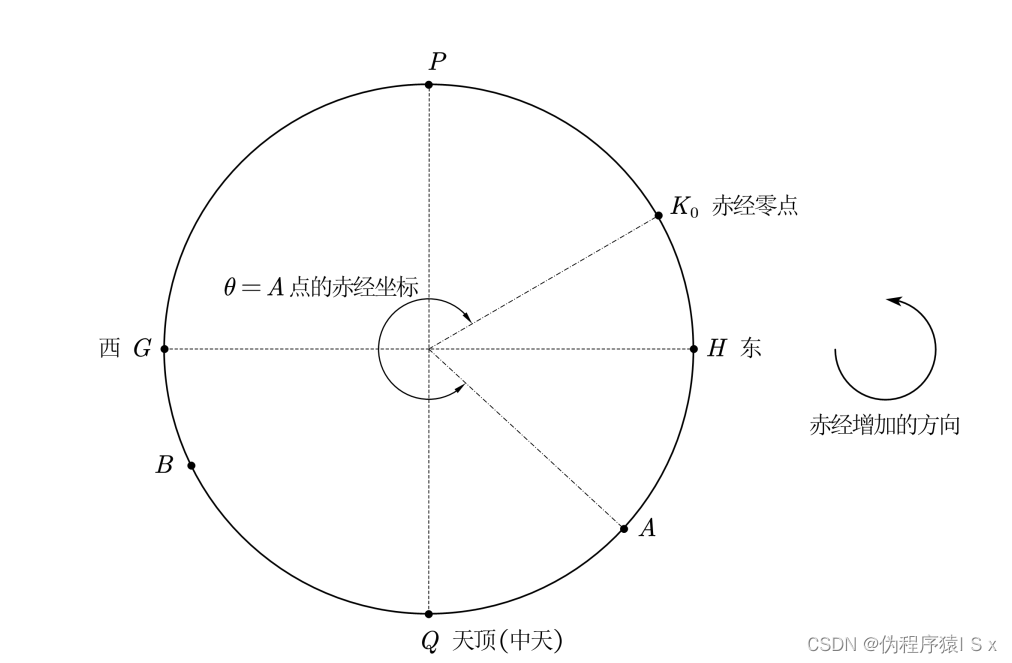
图2 赤经位置的图像表示
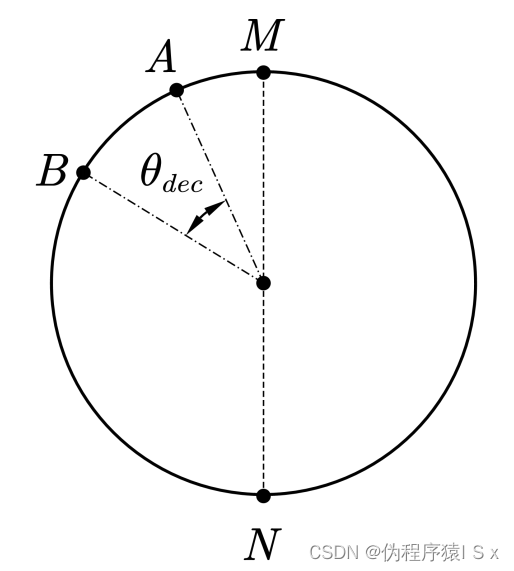
2 赤纬位置的图像表示
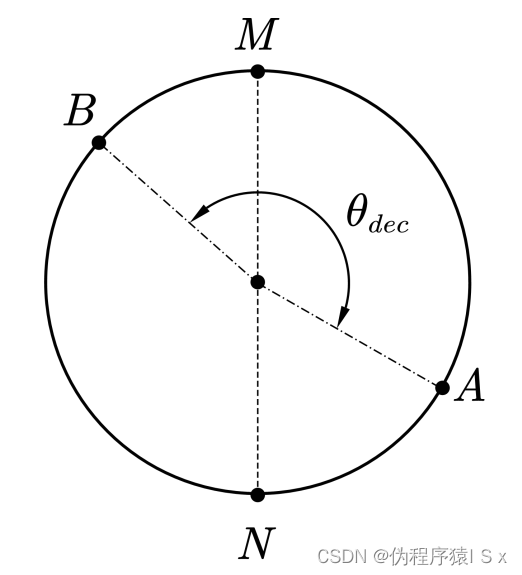
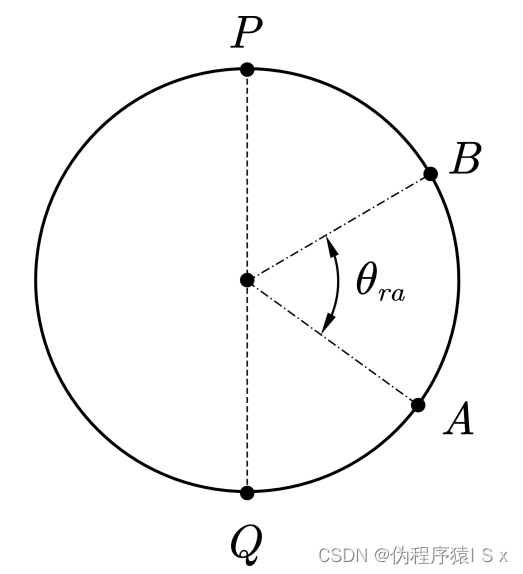
由上述讨论,赤道仪工作的赤纬范围分为左半圆和右半圆,即赤纬正方向会处于不同的半圆,因此赤纬坐标图像需要能分别描述赤道仪赤纬左半圆和右半圆的位置,如图3所示。
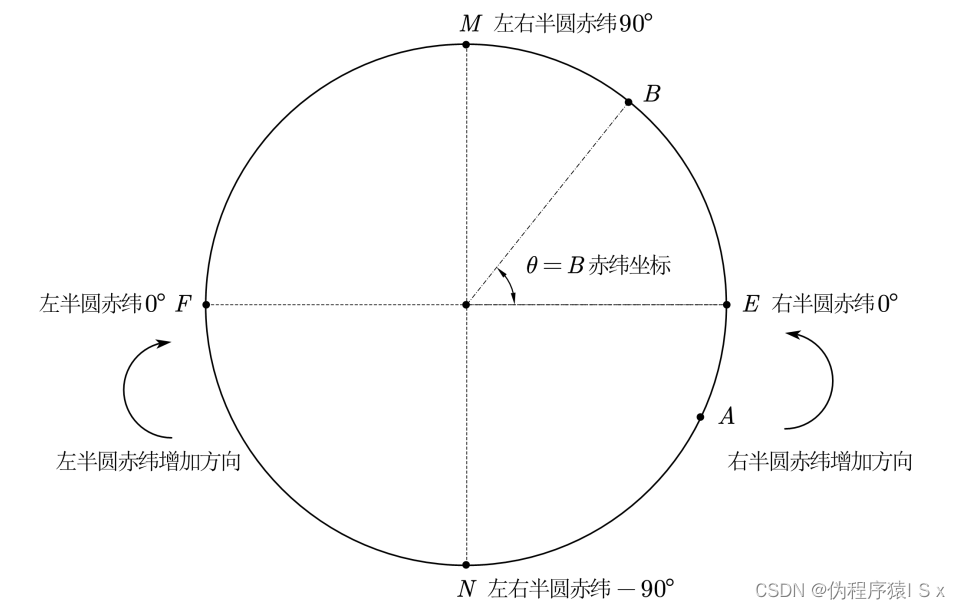
图3 赤纬位置的图像表示
图中各点的意义为:
| 点 | 意义 |
| A | 赤道仪当前指向的天体的赤纬位置 |
| B | 赤道仪目标点的天体的赤纬位置 |
| E | 赤道仪工作半圆为右半圆时的赤经0° |
| F | 赤道仪工作半圆为左半圆时的赤经0° |
| M | 赤纬90°(左右半圆均相同) |
| N | 赤纬-90°(左右半圆均相同) |
3 自动寻星系统的总体目标
自动寻星理论上可以寻找到任何坐标的天体,但是某些天体的位置不利于自动寻星,如未在地平线以上、仰角过高的天体,这些天体约束了自动寻星的可行范围。在自动寻星时,需要避开赤道仪赤纬工作半圆通过天顶,因此需要分情况讨论出发天体和目的地天体的位置,在这些位置规划合理路径以避免赤道仪通过中天。
2.4.2 当前天体与目标天体位置讨论与角度计算
1 相关函数及其实现
在本节,将会给出上述讨论中使用到的函数。
1) 将角度坐标转换在0~360°之间的函数:T(θ)
该函数的实现可由程序循环实现,在程序中可以使用while循环实现,当角度不满足要求时则继续,具体方式如下: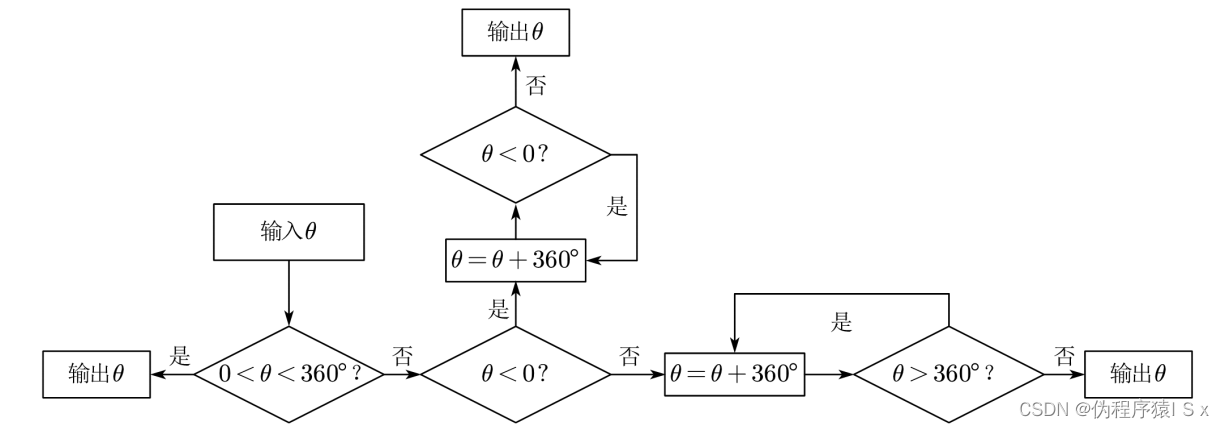
2) 求得两个赤经轴坐标点之间的最短赤经角距离的函数:L(P1,P2)
只要赤经轴上的两个坐标点不相对,则他们之间的最短距离必定为劣弧圆心角,可以利用程序实现,具体方法如下: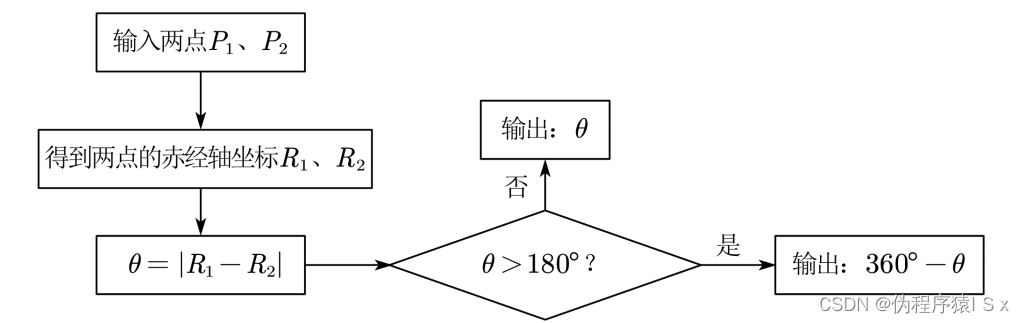
2 当前天体与目标天体位置讨论以及赤道仪运行角度计算
赤道仪运行角度的计算方法主要取决于当前天体和目标天体相对于中天的位置,这里首先将天体坐标表示为符号:
| 符号 | 意义 | 单位 |
| 当前天体和目标天体的赤经坐标 | rad | |
| 当前天体和目标天体的赤纬坐标 | rad | |
| 当前天体和目标天体 | 无 | |
| 位于天顶的假想天体 | 无 |
于是这些位置由以下这些情况组成:
1) 当前天体与目标天体均在中天左侧
这种情况如图所示,此时如果赤道仪工作半圆与当前天体(图中A点)所在位置同名(即赤道仪工作半圆为左边、A如图所示在中天左侧)
 |  |
| 图 赤经轴角度关系 | 图 赤纬轴角度关系 |
则易得运行角度:
| 赤道仪转轴 | 运行角度 | 单位 |
| 赤经轴 | rad | |
| 赤纬轴 | rad |
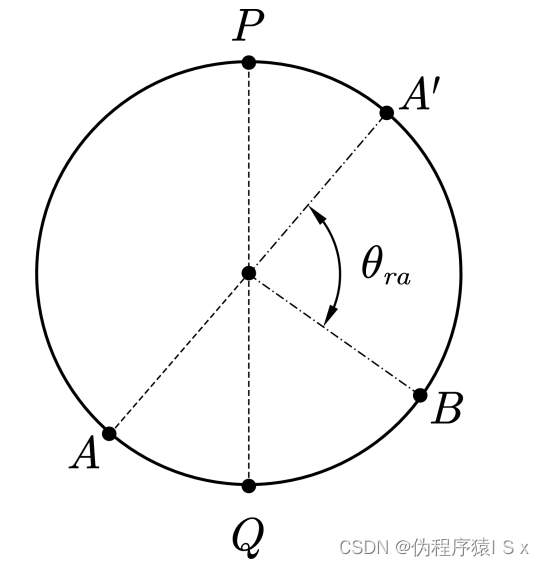
2) 当前天体在中天左侧,目标天体在中天右侧
 |
|
| 图 赤经轴角度关系 | 图 赤纬轴角度关系 |
这种情况如上图所示,当当前天体所在半圆位置和赤道仪赤纬轴工作半圆同名时,此时需要更改赤纬轴运行半圆,对应的赤经轴坐标应相应跳动180°,故该种情况下的运行角度:
| 赤道仪转轴 | 运行角度 | 单位 |
| 赤经轴 | rad | |
| 赤纬轴 | rad |
3) 当前天体在中天右侧,目标天体在中天左侧
 |  |
| 图 赤经轴角度关系 | 图 赤纬轴角度关系 |
这种情况和情况(2)类似,其运行角度如下:
| 赤道仪转轴 | 运行角度 | 单位 |
| 赤经轴 | rad | |
| 赤纬轴 | rad |
4) 当前天体与目标天体均在中天右侧
 |  |
| 图 赤经轴角度关系 | 图 赤纬轴角度关系 |
这种情况下运行角度可以直接计算得:
| 赤道仪转轴 | 运行角度 | 单位 |
| 赤经轴 | rad | |
| 赤纬轴 | rad |
2.4.3 赤道仪转轴转动方向
上述的角度求解过程中,角度的正负号已经做出了区分,可以直接求其计算结果(无论正还是负),并根据下表的描述判断赤道仪的转动方向:
| 角度正负 | 赤道仪旋转方向 |
| 赤经增加的方向 | |
| 赤经减少的方向 | |
| 在赤纬该工作半圆下,使得赤纬增加的方向 | |
| 在赤纬该工作半圆下,使得赤纬减少的方向 |
2.4.4 异常情况处理与中天翻转
在赤道仪自动寻星过程中,存在上述算法没有考虑到的情况,当赤道仪的工作半圆与当前天体所在的位置半圆不同名时,利用上述算法会导致严重后果,赤经轴转动方向和赤纬轴转动方向异常,此时需要判断赤道仪的工作半圆和天体位置半圆是否同名;在导星时,当目标天体经过中天后,天体高度角会下降,而望远镜会慢慢移动到赤道仪下方,因此该情况下,同上一种情况,需要判断天体位置半圆与赤经轴半圆是否同名,而后翻转赤纬轴工作半圆即可。
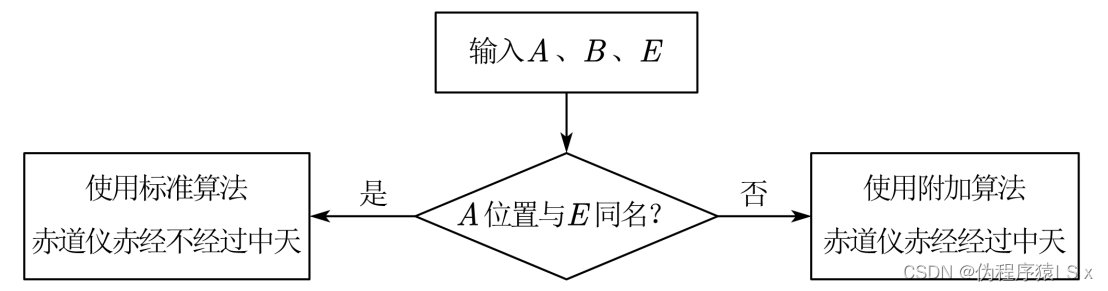
1.赤经轴半圆与赤纬工作半圆不同名
为了保证运行的可靠性,在每次自动寻星计算角度之前,需要判断这两个值是否同名,即在2.4.2节的计算开始前加入判断环节,而后进行角度计算,当天体赤经位置与赤道仪赤纬工作半圆E不同名时,需要让赤经轴通过中天而不翻转赤纬轴工作半圆。该算法可以表示为流程图:
2.导星中天翻转
为了完成这个算法,需要计算的是赤道仪观测的当前位置是否通过中天,如果通过中天且赤纬轴工作半圆与天体所在半圆不同名则立即执行中天翻转,而后重新开始导星,中天翻转的方式如下:
| 步骤 | 内容 |
| STEP1 | 得到当前赤道仪指向位置赤经坐标并对当前视场拍照 |
| STEP2 | 预估赤道仪运行时间,求得该时间内天体漂移角度φ |
| STEP3 | 赤经轴向赤经增加的方向运转180°- φ(需要加入误差曲线) |
| STEP4 | 赤纬工作半圆翻转,赤纬增加运转180°- 2×D(需要加入误差曲线) |
| (STEP5) | 提醒操作者核对位置是否与拍照时的位置相同 |
2.5 自动寻星误差曲线拟合与多星校准
在自动寻星时,由于赤道仪的误差,其自动寻星是不精准的,这些误差有可能但不限于以下几点:1.赤经轴、赤纬轴存在制造误差,正向运动和反向运动的角度误差大小不同;2.极轴校准不精确,赤经赤纬运行后存在偏差;3.赤道仪运行过慢,赤道仪运行指定角度过后星点位置已经偏移。
为了解决上述的误差问题,在本文中利用最小二乘法对误差曲线方程进行多元线性回归,求得误差曲线参数的最大似然估计值。
2.5.1 误差曲线
由以上推论,赤道仪的误差与运行角度相关、所以误差的表达式中必定有运行角度,且必定包含一次项;其次,赤道仪运行时间与星点漂移时间差正比于赤道仪运行角度的平方,因此误差表达式中应该包含二次项;最后,赤道仪存在角度最小误差,以及零位误差,因此表达式中应该包含常数项。于是赤道仪的误差曲线可以表示成如下形式:
两个转轴应当分别有一个误差曲线。
2.5.2 误差曲线拟合、三星校准与多星校准
为了得到误差曲线中的参数,至少需要得到3组运行角度值与其对应的3组误差值,其中赤经轴的运行角度值为2.4节中所述的带符号的运行角度,对于赤纬轴,规定:当赤纬轴的旋转方向为逆时针时,角度为正;反之角度为负。在求取误差曲线之前,应当配置一个坐标精准的校准星表,以观测设备显示屏幕的正中心(视场中央)为正确位置,赤道仪分别开环运行到达不同的校准恒星,操作人员在赤道仪运行结束后微调赤道仪使得目标恒星位于视场中央,此时算法记录操作人员微调赤道仪两个转轴的角度,作为该次的误差角度。该过程的结果如下所示:
| 测试次数 | 赤经轴运行角度 | 赤纬轴运行角度 | 赤经轴的误差 | 赤纬轴的误差 |
| 1 | ||||
| 2 | ||||
| 3 | ||||
| ... | ... | ... | ... | ... |
| n |
在得到上述的数据后求解误差曲线的各个参数,分为两种情况:
1) 测量次数为3组
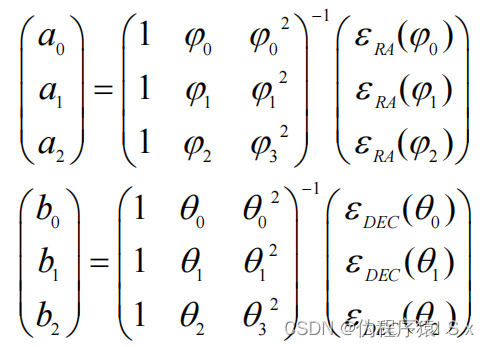
此时可以直接求解出误差曲线的3个参数,即三星校准:
2) 测量次数大于3组
以赤经轴为例,此时的误差计算等式变为:
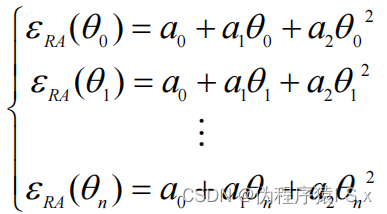
方程个数大于未知数个数,故该方程组为超定方程组,三个常系数存在最小二乘解,即多星校准:
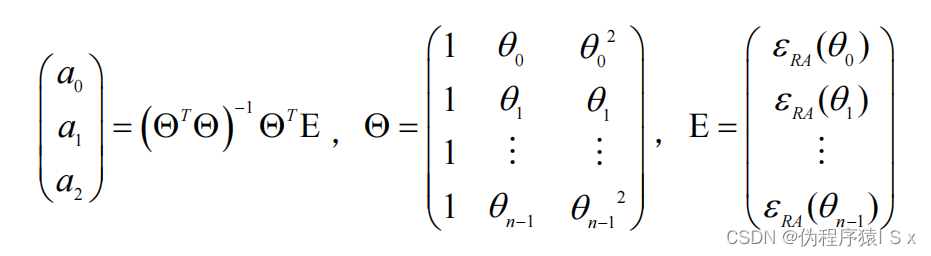
需要指出的是,该种方法为一种开环方案,精度无法得到保证,可以通过图像识别进行闭环控制,得到更加精准的自动寻星方案。当得到上述的三个参数之后,在每次自动寻星时赤道仪运行的角度应当为:
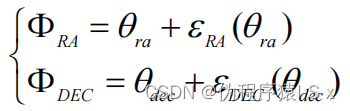
文中提到的自动寻星角度控制、三星校准与多星校准方法可能并非一般赤道仪使用的方法,只是笔者对这些算法的猜想,笔者的这些算法均按照上文的论述实现,如有错误望海涵。
------ Shixuan Liu
2022.12.12


















 4万+
4万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











