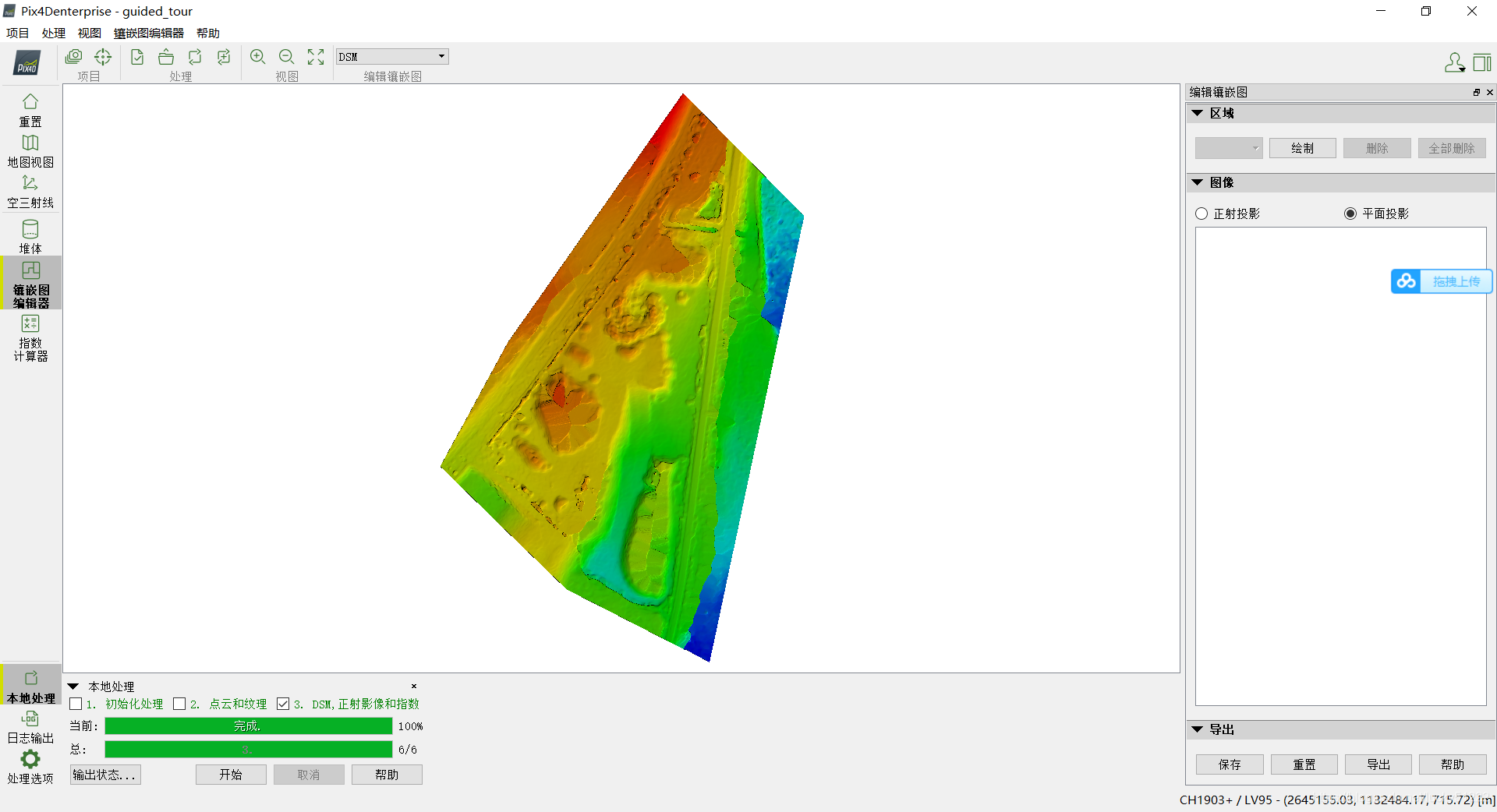
《无人机航空摄影测量精品教程》合集目录(Pix4d、CC、EPS、PhotoScan、Inpho) DEM结果预览: 等高线结果预览: Pix4d内业空三结束后,会生成点云,DOM和DSM等产品,一般情况下,DOM精度不达标(如房屋边缘有噪点)的话,可以直接在镶嵌图编辑器进行DOM的编辑,然而后处理的主要的工作是点云的分类和DSM精编生成DEM,进而才能生成精准的等高线,提取特征高程点。那么怎样进行点云分类,怎样精编DEM呢?本文就通过案例的形式进行讲解。 文章目录 一、点云分类与分配 1. 点云分类 2. 点云分配 二、生成DEM 三、生成等高线 一、点云分类与分配<








 该专栏为热销专栏榜 第39名
该专栏为热销专栏榜 第39名 本文详细介绍了Pix4d软件在空三后处理中的点云分类与分配、DSM精编生成DEM以及等高线的生成过程。点云分类包括地面、道路、植被和建筑等类型,通过点云分配得到精确的地面点云。生成DEM需重新运行处理,确保DSM质量。最后,设置等高线参数生成等高线,用于地形分析。
本文详细介绍了Pix4d软件在空三后处理中的点云分类与分配、DSM精编生成DEM以及等高线的生成过程。点云分类包括地面、道路、植被和建筑等类型,通过点云分配得到精确的地面点云。生成DEM需重新运行处理,确保DSM质量。最后,设置等高线参数生成等高线,用于地形分析。
 等高线结果预览:
等高线结果预览: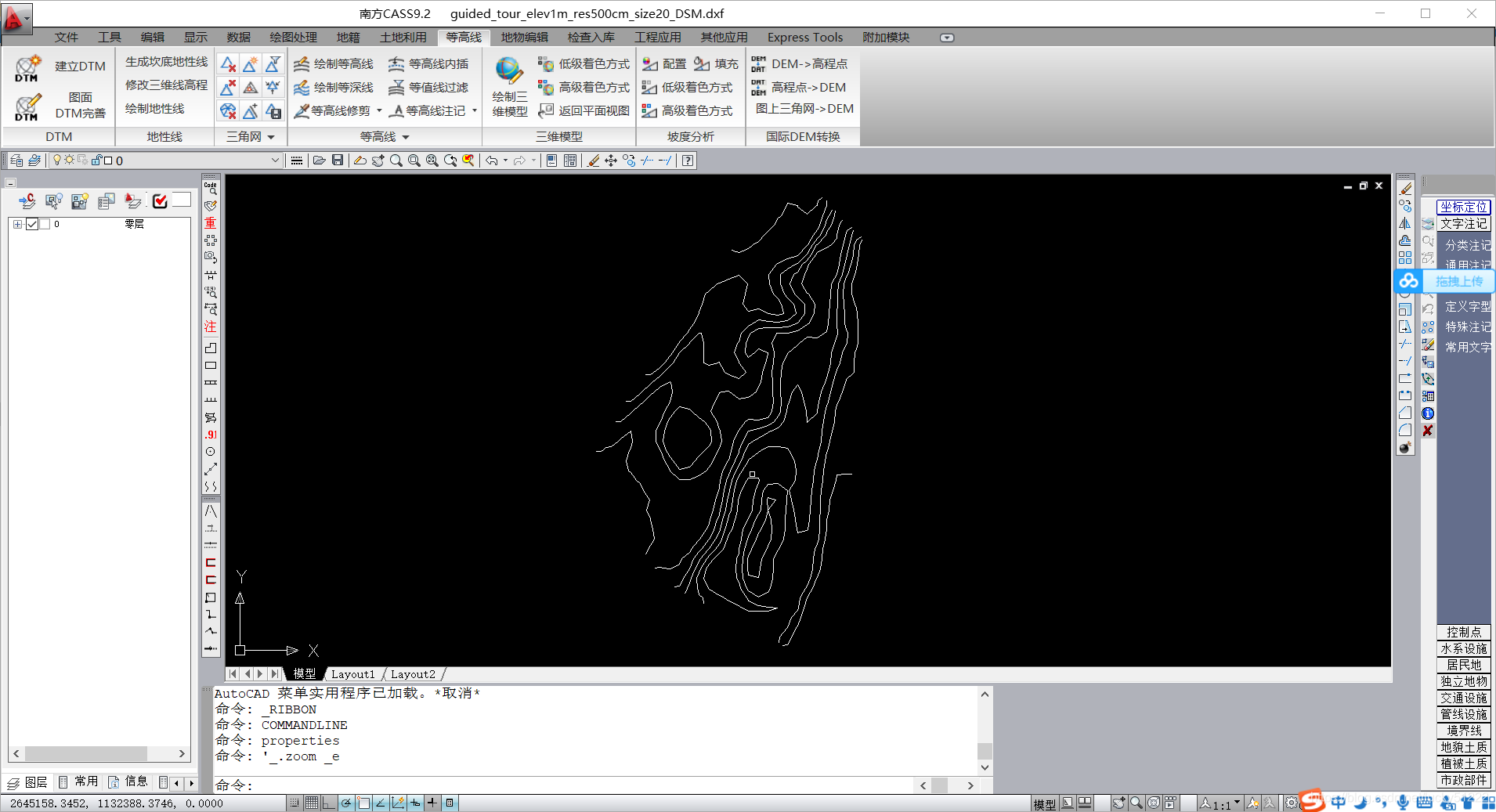

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 6454
6454

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








