






本文将由游戏开发者Jiasheng Tang分享在Unity中实现手部跟踪的三种方法。
很多人小时候,一直梦想着使用双手来远程操控物体。通常,我们可以触碰、移动、滚动和投掷物体,但我们不能像电影中的巫师或绝地大师,可以在不接触物体的情况下操控物体。
虽然这个梦想在现实生活中难以企及,但在虚拟世界中是存在可能的。
Microsoft Kinect曾非常受欢迎,因为用户可以通过使用它,来用双手切掉虚拟的水果。Leap Motion允许用户以精妙的方式和虚拟物体进行交互。
这些产品都需要使用额外的硬件,费用比较昂贵。即使拥有相应设备,普通用户也较难实现这种体验。如果有一种方法只使用带有普通RGB摄像头智能手机,就可以跟踪双手,这会是多酷的体验。
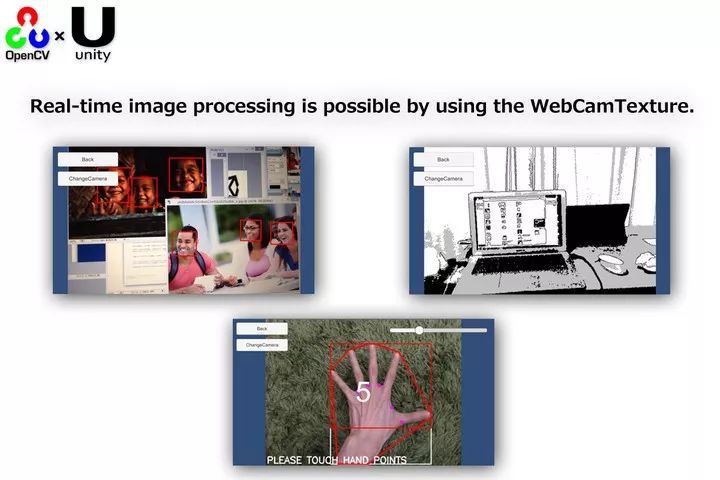
本文将介绍如何在Unity中通过使用RGB摄像头实现手部跟踪。
学习准备
- 学习本文,你需要掌握以下知识内容:Unity的相关知识,本文开发使用的是Unity 2018.3.14。
- OpenCV的基础知识。你需要在Asset Store资源商店获取OpenCV For Unity插件:
- 对神经网络的基本了解。
手部跟踪的方法总结
使用RGB进行手部跟踪有三种方法:Haar级联方法,轮廓方法和神经网络方法。
下面是对三种方法的总结:
Haar级联方法
简单来说,这种方法很容易实现,而且速度非常快,但缺点是非常不稳定。
Haar级联方法是跟踪面部的常用方法,但手和脸不同,手没有固定的形态。如果只希望找到静态的标准手部图像,例如:手掌向前的张手画面,这种方法可能会起到作用。
轮廓方法
这是一种直截了当并易于实现的方法,提供很多可以定制的参数来根据用例调整,而且在计算方面的开销也不是很大。
如果用户在自己房间使用该方法,它会有很好的效果。但在移动设备上,由于光线会发生变化,背景会移动,而且用户周围会有其他人,因此该方法没有很理想的效果。
神经网络方法
这种方法在三种方法中有最强的稳定性,可以应对多种情形。然而,这种方法在计算方面的开销很大。
手部跟踪的实现
下面将介绍相应的代码,你可以访问GitHub获取完整的代码。
Haar级联方法
Haar级联是使用机器学习提取特征到XML文件的方法。
首先,我们需要获取训练好的XML文件,该文件叫palm.xml,它专门为识别手掌而训练。
获取训练好的XML文件,请访问:
在下载好该文件后,把它移动到Unity中的StreamingAssets文件夹。
加载级联文件时,使用以下代码:
- var cascadeFileName = Utils.getFilePath("palm.xml");
- cascadeDetector = new CascadeClassifier();
- cascadeDetector.load(cascadeFileName);
运行检测时,我们会进行一些必要的预处理过程:把图像转换为灰度图,并调整直方图。然后,我们可以调用detectMultiScale函数。
- MatOfRect hands = new MatOfRect();
- Mat gray = new Mat(imgHeight, imgWidth, CvType.CV_8UC3);
- Imgproc.cvtColor(image, gray, Imgproc.COLOR_BGR2GRAY);
- Imgproc.equalizeHist(gray, gray);
- cascadeDetector.detectMultiScale(gray, hands, 1.1, 2, 0 | Objdetect.CASCADE_DO_CANNY_PRUNING | Objdetect.CASCADE_SCALE_IMAGE | Objdetect.CASCADE_FIND_BIGGEST_OBJECT, new Size(10, 10), new Size());
- OpenCVForUnity.CoreModule.Rect[] handsArray = hands.toArray();
- if (handsArray.Length != 0){
- //手部已经检测到
- }
轮廓方法
基于轮廓的方法是很直接的方法,这种方法只使用了计算机视觉,没有使用比较特别的模型。
轮廓方法基本上有二个主要步骤:
- 找到图像上符合人类皮肤颜色的区域。
- 找到符合手指的轮廓形状。
人类皮肤颜色通常是色谱的一部分,手机游戏账号买卖平台为了找到这类颜色,我们需要把颜色形式从RGB转换为YCrCb,并检查每个像素是否都在该范围内。
- Mat YCrCb_image = new Mat();
- int Y_channel = 0;
- int Cr_channel = 1;
- int Cb_channel = 2;
- Imgproc.cvtColor(imgMat, YCrCb_image, Imgproc.COLOR_RGB2YCrCb);
- var output_mask = Mat.zeros(imgWidth, imgHeight, CvType.CV_8UC1);
- for (int i = 0; i < YCrCb_image.rows(); i++)
- {
- for (int j = 0; j < YCrCb_image.cols(); j++)
- {
- double[] p_src = YCrCb_image.get(i, j);
- if (p_src[Y_channel] > 80 && p_src[Cr_channel] > 135 && p_src[Cr_channel] < 180 && p_src[Cb_channel] > 85 && p_src[Cb_channel] < 135)
- {
- output_mask.put(i, j, 255);
- }
- }
最终结果是一个遮罩,符合人类皮肤颜色的像素是白色,剩余部分是黑色。
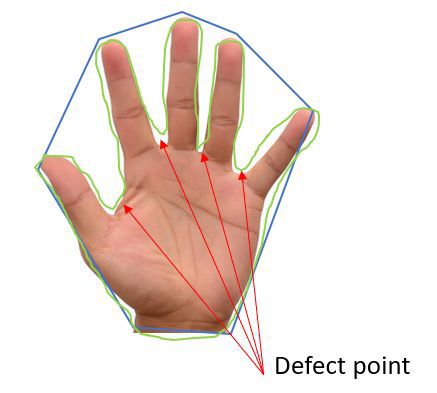
在获得这个遮罩后,我们会提取遮罩的凸壳和轮廓,并检测“瑕疵”。“瑕疵”点表示轮廓线上远离凸壳的点。如果“瑕疵”的角度和长度等参数符合特定标准,那么我们就知道“瑕疵”对应着手指。
在找到足够的“手指瑕疵”时,我们会告诉系统找到了手部,根据经验,我们把这里的“足够”定义为1和4之间的数量。
下图是瑕疵点的图示,蓝线是凸壳,绿线是轮廓。
- //在图像中找到轮廓
- List<MatOfPoint> contours = new List<MatOfPoint>();
- Imgproc.findContours(maskImage, contours, new MatOfPoint(), Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
- var points = new MatOfPoint(contours[index].toArray());
- var hull = new MatOfInt();
- Imgproc.convexHull(points, hull, false);
- //找到瑕疵
- var defects = new MatOfInt4();
- Imgproc.convexityDefects(points, hull, defects);
- var start_points = new MatOfPoint2f();
- var far_points = new MatOfPoint2f();
- //循环检查瑕疵,了解它是否符合条件
- for (int i = 0; i < defects.size().height; i++)
- {
- int ind_start = (int)defects.get(i, 0)[0];
- int ind_end = (int)defects.get(i, 0)[1];
- int ind_far = (int)defects.get(i, 0)[2];
- double depth = defects.get(i, 0)[3] / 256;
- double a = Core.norm(contours[index].row(ind_start) - contours[index].row(ind_end));
- double b = Core.norm(contours[index].row(ind_far) - contours[index].row(ind_start));
- double c = Core.norm(contours[index].row(ind_far) - contours[index].row(ind_end));
- double angle = Math.Acos((b * b + c * c - a * a) / (2 * b * c)) * 180.0 / Math.PI;
- double threshFingerLength = ((double)maskImage.height()) / 8.0;
- double threshAngle = 80;
- if (angle < threshAngle && depth > threshFingerLength)
- {
- //起点
- var aa = contours[index].row(ind_start);
- start_points.push_back(contours[index].row(ind_start));
- far_points.push_back(contours[index].row(ind_far));
- }
- }
- // 检查找到的瑕疵是否在范围内
- if (far_points.size().height > min_defects_count && far_points.size().height < max_defects_count)
- {
- //检测到手部
- }
神经网络方式
在近几年,与用于许多任务的传统解决方案相比,基于神经网络的解决方案实现了更好的性能,这在计算机视觉领域特别明显。因为我们的任务是计算机视觉任务,所以我们自然希望使用神经网络。
实际上,目标检测在GitHub上有许多关于手部跟踪的优秀项目。例如:Victordibia的handtracking项目使用经典的目标检测模型架构 - 单步检测SSD。
下载了解Victordibia的handtracking项目:
单步检测SSD因其快捷的推理速度而出名,适用于实时应用。为了进一步提升速度,该模型使用了MobileNet结构来进行调整,最后我们得到了SSDMobileNet结构,预训练模型的大小只有约20MB的大小。
然而,这些解决方案使用Python和TensorFlow框架依赖来编写,我们要如何把它使用到Unity中呢?
一个热门方法是使用TensorflowSharp,即TensorFlow框架的C#版本。但这种方法的速度对实时应用来说太慢了,帧率甚至不到1fps。
我选择使用了OpenCV的DNN模块。该模块是OpenCVForUnity插件的一部分,提供了一些示例场景来展示使用方法。如果想要使用自定义模型,需要执行额外的步骤来把模型转换为OpenCV理解的格式。
首先要转换模型。OpenCV需要特别的pbtxt文件来使模型正常加载。生成该文件时,我们需要模型的冻结视图,以及针对模型的管线配置。
我从这个GitHub项目获取了二个相应的文件frozen_inference_graph.pb和ssd_mobilenet_v1_coco.config。
转换过程的实现,请查看Github的代码,生成出来的frozen_inference_graph.pbtxt文件也包含在其项目中。
在准备好frozen_inference_graph.pb和frozen_inference_graph.pbtxt文件后,我们要把它们移动到Unity中的StreamingAssets文件夹。
加载模型时,使用以下代码:
- var modelPath = Utils.getFilePath("frozen_inference_graph.pb");
- var configPath = Utils.getFilePath("frozen_inference_graph.pbtxt");
- tfDetector = Dnn.readNetFromTensorflow(modelPath, configPath);
- 进行检测时,使用以下代码:
- var blob = Dnn.blobFromImage(image, 1, new Size(300, 300), new Scalar(0, 0, 0), true, false);
- tfDetector.setInput(blob);
- Mat prob = tfDetector.forward();
- Mat newMat = prob.reshape(1, (int)prob.total() / prob.size(3));
- float maxScore = 0;
- int scoreInd = 0;
- for (int i = 0; i < newMat.rows(); i++)
- {
- var score = (float)newMat.get(i, 2)[0];
- if (score > maxScore)
- {
- maxScore = score;
- scoreInd = i;
- }
- }
- if (maxScore > thresholdScore)
- {
- // 检测到手部
- }
我们要注意的一个参数是blobFromImage函数中的Size值。在传递到模型前,图像会调整为该数值的大小。
建议把Size设为300,因为这是模型的训练图像的大小,但如果帧率对应用很重要,该数值可以减少为150。
手指跟踪
你可能会注意到,我们做的这些事情有一个很大的限制:我们只能跟踪“手部”,而手指跟踪不包含在工具包中。
跟踪手指的方法也很多,其中一个流行方法是使用神经网络模型从RGB图像中估算3D手部姿势,你可以参考和下载以下代码:
小结
在Unity中实现手部跟踪的方法为大家介绍到这里,让我们行动起来,在虚拟世界中成为可隔空控物的绝地大师吧。















 914
914











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









