







这篇文章主要介绍一个有效的数据降维的方法 t-SNE.
大数据时代,数据量不仅急剧膨胀,数据也变得越来越复杂,数据的维度也随之增加。比如大图片,数据维度指的是像素的数量级,范围从数千到数百万。计算机可以处理任意多维的数据集,但我们人类认知只局限于3维空间,计算机依然需要我们(值得庆幸的),所以需要通过一些方法有效的可视化高维数据。通过观察现实世界的数据集发现其存在一些较低的本征维度。想像一下你拿着相机在拍照,可以把每张图片认为是16,000,000维空间的点(假设相机是16像素的),但是这些照片是近似分布在三维空间,这个低维空间使用一个复杂的、非线性的方法嵌入到高维空间,这种结构隐藏在数据中,只有通过一定的数学分析方法还原。
这里讲到的是流行学习方法,也可以说非线性降维方法,ML的一个分支(更具体的说,是非监督学习)。这篇文章主要讲到一个流行的数据降维的方法t-SNE,由Laurens vander Maaten和 Geoffrey Hinton提出(原文章).算法成功的应用于很多真实数据集。这里根据原文的思想处理手写数字识别库mnist,使用Python和scikit-learn .
可视化mnist
首先import一些libraries。
import numpy as np
from numpy import linalg
from numpy.linalg import norm
from scipy.spatial.distance import squareform, pdist
- 1
- 2
- 3
- 4
再import sklearn
import sklearn
from sklearn.manifold import TSNE
from sklearn.datasets import load_digits
from sklearn.preprocessing import scale
from sklearn.metrics.pairwise import pairwise_distances
from sklearn.manifold.t_sne import (_joint_probabilities,
_kl_divergence)
from sklearn.utils.extmath import _ravel
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
随机状态值
RS = 20150101
- 1
使用图形库matplotlib
import matplotlib.pyplot as plt
import matplotlib.patheffects as PathEffects
import matplotlib
%matplotlib inline
- 1
- 2
- 3
- 4
使用seaborn更好绘制图
import seaborn as sns
sns.set_style('darkgrid')
sns.set_palette('muted')
sns.set_context("notebook", font_scale=1.5,
rc={"lines.linewidth": 2.5})
- 1
- 2
- 3
- 4
- 5
使用matplotlib 和 moviepy生成动画
from moviepy.video.io.bindings import mplfig_to_npimage
import moviepy.editor as mpy
- 1
- 2
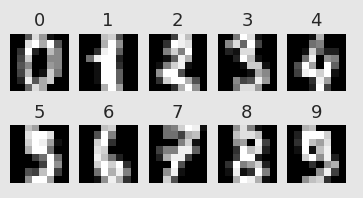
加载手写数字识别库,共有1797张图片,每张大小8X8
digits = load_digits()
digits.data.shape
print(digits['DESCR'])
- 1
- 2
- 3
Data Set Characteristics:
:Number of Instances: 5620
:Number of Attributes: 64
:Attribute Information: 8x8 image of integer pixels in the range 0..16.
:Missing Attribute Values: None
nrows, ncols = 2, 5
plt.figure(figsize=(6,3))
plt.gray()
for i in range(ncols * nrows):
ax = plt.subplot(nrows, ncols, i + 1)
ax.matshow(digits.images[i,...])
plt.xticks([]); plt.yticks([])
plt.title(digits.target[i])
plt.savefig('images/digits-generated.png', dpi=150)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
现在运行t-SNE算法:
X = np.vstack([digits.data[digits.target==i]
for i in range(10)])
y = np.hstack([digits.target[digits.target==i]
for i in range(10)])
digits_proj = TSNE(random_state=RS).fit_transform(X)
- 1
- 2
- 3
- 4
- 5
下面是一个显示转换后数据集的函数
def scatter(x, colors):
# We choose a color palette with seaborn.
palette = np.array(sns.color_palette("hls", 10))
# We create a scatter plot.
f = plt.figure(figsize=(8, 8))
ax = plt.subplot(aspect='equal')
sc = ax.scatter(x[:,0], x[:,1], lw=0, s=40,
c=palette[colors.astype(np.int)])
plt.xlim(-25, 25)
plt.ylim(-25, 25)
ax.axis('off')
ax.axis('tight')
# We add the labels for each digit.
txts = []
for i in range(10):
# Position of each label.
xtext, ytext = np.median(x[colors == i, :], axis=0)
txt = ax.text(xtext, ytext, str(i), fontsize=24)
txt.set_path_effects([
PathEffects.Stroke(linewidth=5, foreground="w"),
PathEffects.Normal()])
txts.append(txt)
return f, ax, sc, txts
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
结果:
scatter(digits_proj, y)
plt.savefig('images/digits_tsne-generated.png', dpi=120)
- 1
- 2
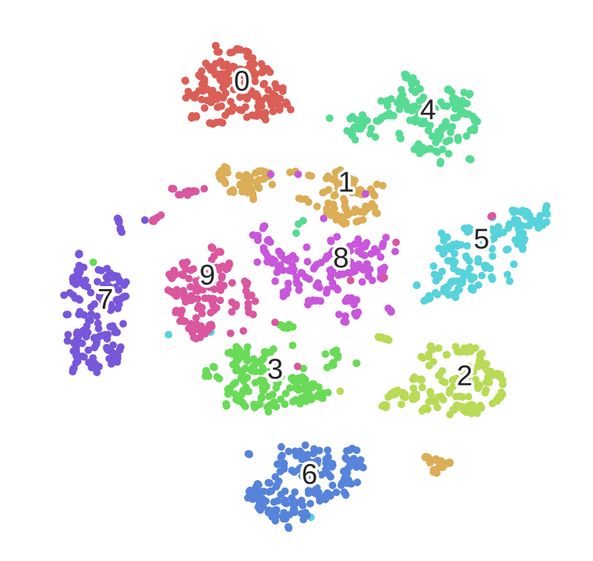
不同颜色的点代表不同的数字,可以观察到相同的数字被清晰的分到不同的聚集区域.
数学框架
下面介绍算法的工作原理。首先,介绍几个定义:
数据点X_i分布在原始数据空间R^D,数据空间的维度为D=64,每个点代表手写数字识别库中的每张图片。总共有N=1797个点。
映射点y_i在映射空间R^2,映射空间是我们对数据的最终表达。数据点和映射点之间存在双射关系,一个映射点表示一张原始图片。
我们该怎样选择映射点的位置呢?如果两个数据点距离比较近,我们希望对应的两个映射点的位置也相对比较接近。另|x_i−x_j|计算两个数据点间的欧式距离,|y_i−y_j| 表示映射点的距离。首先定义两数据点间的条件相似性:
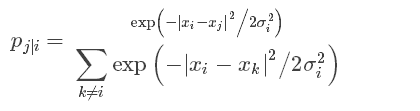
公式度量了x_i与x_j的距离,σ_i^2为满足高斯分布的x_i的方差。原文详细讲解方差的计算,这里不再写。
现在定义相似度:
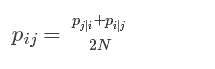
我们从原始图像获得一个相似矩阵,这个矩阵是怎样的呢?
相似矩阵
下面的函数定义了计算相似矩阵函数,常量 σ:
def _joint_probabilities_constant_sigma(D, sigma):
P = np.exp(-D**2/2 * sigma**2)
P /= np.sum(P, axis=1)
return P
# Pairwise distances between all data points.
D = pairwise_distances(X, squared=True)
# Similarity with constant sigma.
P_constant = _joint_probabilities_constant_sigma(D, .002)
# Similarity with variable sigma.
P_binary = _joint_probabilities(D, 30., False)
# The output of this function needs to be reshaped to a square matrix.
P_binary_s = squareform(P_binary)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
现在可以显示数据点的距离阵:
plt.figure(figsize=(12, 4))
pal = sns.light_palette("blue", as_cmap=True)
plt.subplot(131)
plt.imshow(D[::10, ::10], interpolation='none', cmap=pal)
plt.axis('off')
plt.title("Distance matrix", fontdict={'fontsize': 16})
plt.subplot(132)
plt.imshow(P_constant[::10, ::10], interpolation='none', cmap=pal)
plt.axis('off')
plt.title("$p_</span>{j|i}$ (constant $\sigma$)", fontdict={'fontsize': 16})
plt.subplot(133)
plt.imshow(P_binary_s[::10, ::10], interpolation='none', cmap=pal)
plt.axis('off')
plt.title("$p_</span>{j|i}$ (variable $\sigma$)", fontdict={'fontsize': 16})
plt.savefig('images/similarity-generated.png', dpi=120)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
接下来定义映射点的相似矩阵:
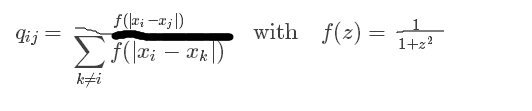
pij和qij足够的接近,即达到使数据点和映射点足够接近的目的。
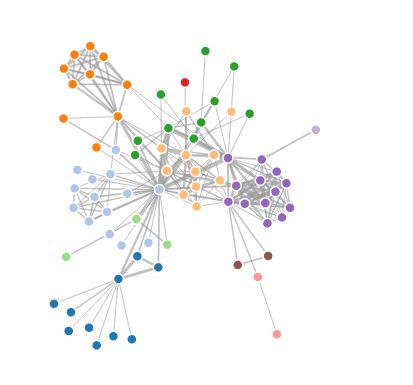
结构分析
如果两个映射点距离较远但是数据点较近,他们会相互吸引,当两个映射点较远数据点较近,他们会排斥。当达到平衡时获得最后的映射。下面的插图展示了这一特点:
算法
以上物理的类比来源于数学的算法,最小化两个分布的 Kullback-Leiber发散程度:

这里度量了两个相似矩阵的距离。
使用梯度下降最优化结果:

u_ij对应于y_j到y_i的向量,梯度表达的是作用在映射节点i上的所有弹缩力的和。
# This list will contain the positions of the map points at every iteration.
positions = []
def _gradient_descent(objective, p0, it, n_iter, n_iter_without_progress=30,
momentum=0.5, learning_rate=1000.0, min_gain=0.01,
min_grad_norm=1e-7, min_error_diff=1e-7, verbose=0,
args=[]):
# The documentation of this function can be found in scikit-learn's code.
p = p0.copy().ravel()
update = np.zeros_like(p)
gains = np.ones_like(p)
error = np.finfo(np.float).max
best_error = np.finfo(np.float).max
best_iter = 0
for i in range(it, n_iter):
# We save the current position.
positions.append(p.copy())
new_error, grad = objective(p, *args)
error_diff = np.abs(new_error - error)
error = new_error
grad_norm = linalg.norm(grad)
if error < best_error:
best_error = error
best_iter = i
elif i - best_iter > n_iter_without_progress:
break
if min_grad_norm >= grad_norm:
break
if min_error_diff >= error_diff:
break
inc = update * grad >= 0.0
dec = np.invert(inc)
gains[inc] += 0.05
gains[dec] *= 0.95
np.clip(gains, min_gain, np.inf)
grad *= gains
update = momentum * update - learning_rate * grad
p += update
return p, error, i
sklearn.manifold.t_sne._gradient_descent = _gradient_descent
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
<link rel="stylesheet" href="http://csdnimg.cn/release/phoenix/production/markdown_views-d4dade9c33.css">
</div>















 495
495

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









